一种十字交叉式钢结构件间距测量设备的制作方法
1.本发明属于钢结构件间距测量技术领域,尤其是涉及一种十字交叉式钢结构件间距测量设备。
背景技术:
2.钢结构是建筑中常用的一种建筑类型,整体结构主要由型钢和钢板等制成的钢梁、钢柱、钢桁架等构件组成,大型钢结构壁板上包含加强构件,在钢结构分段制作和整体合拢过程,需要测量两加强构件之间的距离,以验证分段制作精度和合拢定位精度。
3.现有专利(申请号:cn202021968903.6)十字交叉式钢结构件间距测量装置。十字交叉式钢结构件间距测量装置包括悬挂测量臂、基点测量臂和标尺;悬挂测量臂与基点测量臂中间设有旋转中心点,中心锁紧轴穿过旋转中心点将二者连接形成十字交叉式结构;悬挂测量臂上端设有测量点ⅰ紧密贴合在钢结构件测量基点,下端设有标线点用于依据标尺确定测量基点向外平行偏移的距离;基点测量臂下端设有测量点ⅱ紧密贴合在钢结构件测量基点,上端设有悬挂点,标尺锁紧轴通过悬挂点将直尺连接在基点测量臂;标尺下部套装有采用标杆锁紧器限定的滑动标杆,上述装置在使用的过程中,可以使得测量位置平行外移,以避免人员钻入结构内部测量。
4.但是,上述装置在使用的过程中,不能对测量点进行有效的清理,使得测量端容易与测量点的杂质颗粒接触,既容易磨损测量端,又会造成测量误差,且测量端与测量点对接的稳固性较差。
5.为此,我们提出一种十字交叉式钢结构件间距测量设备来解决上述问题。
技术实现要素:
6.本发明的目的是针对上述问题,提供一种十字交叉式钢结构件间距测量设备。
7.为达到上述目的,本发明采用了下列技术方案:一种十字交叉式钢结构件间距测量设备,包括支撑座,所述支撑座上固定连接有支撑板,且支撑板上转动连接有支撑轴,所述支撑轴远离支撑板的一端固定连接有框架,所述框架上转动连接有双向丝杠,且双向丝杠上螺纹连接有两个支撑块,两个所述支撑块均与框架滑动连接,且两个支撑块上均转动连接有测量臂,两个所述测量臂的中心点处转动连接,且测量臂上开设有定位槽,所述定位槽中设置有定位座,所述定位座为中空设计,且定位座中固定连接有支撑杆,所述支撑杆上转动连接有多个变向扇,且定位座上设置有与各个变向扇相配合的驱动机构,所述定位座靠近各个变向扇的一侧侧壁开设有多个气孔,所述定位槽中设置有与驱动机构电性连接的变向开关机构,其中一个所述支撑块上开设有防护槽,且防护槽中设置有激光测距仪。
8.在上述的一种十字交叉式钢结构件间距测量设备中,所述驱动机构包括蜗杆、蜗轮和微型马达,所述蜗杆转动设置于定位座中,且蜗杆的一端与微型马达传动连接,所述蜗轮固定套接于变向扇的传动轴上,且蜗轮与蜗杆相啮合,所述蜗轮的数量与变向扇的数量相等。
9.在上述的一种十字交叉式钢结构件间距测量设备中,所述变向开关机构包括滑板、第一导电块、第一电接块、第二导电块和第二电接块,所述滑板滑动设置于定位槽中,且定位座与滑板固定连接,所述滑板与定位槽之间固定连接有多个复位弹簧,所述第一导电块和第二导电块分别固定设置于滑板的两侧,所述第一电接块和第二电接块均固定设置于定位槽中,且第一电接块和第二电接块分别与第一导电块和第二导电块相对应,所述第一导电块和第二导电块均与微型马达电性连接。
10.在上述的一种十字交叉式钢结构件间距测量设备中,所述框架上固定连接有两个金属块,且支撑板上开设有与两个金属块相配合的环形滑槽,所述环形滑槽中嵌设有电磁条,且电磁条与金属块接触连接,所述支撑板上设置有与电磁条电性连接的继电器。
11.在上述的一种十字交叉式钢结构件间距测量设备中,所述防护槽的外侧壁上嵌设有透明板,其中一个所述支撑块上设置有与激光测距仪电性连接的按压开关。
12.在上述的一种十字交叉式钢结构件间距测量设备中,所述支撑座的下端固定连接有多个万向轮,且万向轮能够自锁,所述测量臂的各个转动点均采用阻尼转轴作为驱动件。
13.在上述的一种十字交叉式钢结构件间距测量设备中,所述双向丝杠的螺纹升角小于双向丝杠与支撑块间的摩擦角,且双向丝杠的一端贯穿框架并固定连接有转把。
14.在上述的一种十字交叉式钢结构件间距测量设备中,所述变向扇的扇叶正反两面为完全反对称设计,所述气孔上设置有滤网。
15.在上述的一种十字交叉式钢结构件间距测量设备中,所述测量臂上设置有与微型马达电性连接的启闭开关,所述蜗杆的螺旋展开角大于当量摩擦角。
16.在上述的一种十字交叉式钢结构件间距测量设备中,所述防护槽中滑动连接有滑块,且激光测距仪设置于滑块上,所述防护槽的一侧侧壁转动连接有螺母套,且螺母套中螺纹连接有螺杆,所述螺杆的一端延伸至防护槽中设置并与滑块固定连接。
17.本发明的有益效果在于:通过设置的双向丝杠配合两个支撑块,可以调节两个测量臂快速展开,进而使得定位座可以快速与测量点对接,双向丝杠的螺纹升角设计,使得双向丝杠可以与支撑块自锁,进而实现测量臂的快速锁定,对接前,在驱动机构的调控下,使得各个变向扇顺时针转动,产生吹风的效果,可以有效清除测量点上附着的杂质颗粒,避免定位座产生摩擦,同时保证测量的精准度,当对接后,在变向开关机构的作用下,可以改变驱动机构的传动方向,进而使得各个变向扇可以逆时针转动产生吸风的效果,进而使得定位座内部产生负压,使得各个吸孔可以吸紧测量点,保证测量的稳定性,通过设置的支撑轴,可以调节两个测量臂的角度,以便于配合不同角度的钢结构,通过设置的电磁条,可以利用电磁条通电生磁吸合金属块,进而快速锁定支撑轴,以避免人工锁定的繁琐。
18.综上所述:通过本装置的设置,可以在进行测量的过程中,及时清理测量点附近附着的杂质颗粒,同时在定位座与测量点对接后,在变向开关机构的作用下,使得驱动机构自动改变传动方向,进而使得各个变向扇可以进行吸气作业,利用负压原理,使得各个气孔吸紧测量点,进而保证测量过程的稳定。
附图说明
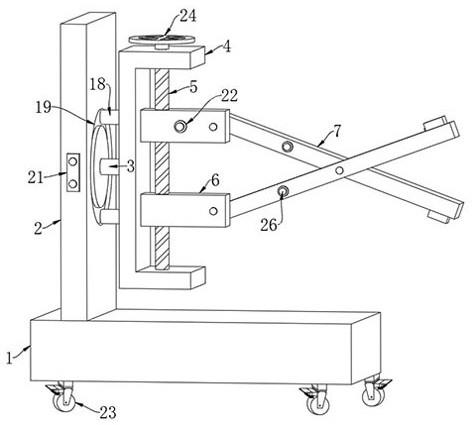
19.图1是本发明提供的一种十字交叉式钢结构件间距测量设备实施例1的整体结构示意图;
图2是本发明提供的一种十字交叉式钢结构件间距测量设备实施例1的支撑板和环形滑槽相互配合的结构示意图;图3是本发明提供的一种十字交叉式钢结构件间距测量设备实施例1的定位槽的内部结构示意图;图4是本发明提供的一种十字交叉式钢结构件间距测量设备实施例1的定位座的内部结构示意图;图5是本发明提供的一种十字交叉式钢结构件间距测量设备实施例1的防护槽的内部结构示意图;图6是本发明提供的一种十字交叉式钢结构件间距测量设备实施例2的防护槽的内部结构示意图。
20.图中:1支撑座、2支撑板、3支撑轴、4框架、5双向丝杠、6支撑块、7测量臂、8定位槽、9定位座、10支撑杆、11变向扇、12驱动机构、121蜗杆、122蜗轮、123微型马达、13气孔、14变向开关机构、141滑板、142第一导电块、143第一电接块、144第二导电块、145第二电接块、15防护槽、16激光测距仪、17复位弹簧、18金属块、19环形滑槽、20电磁条、21继电器、22按压开关、23万向轮、24转把、25滤网、26启闭开关、27滑块、28螺母套、29螺杆。
具体实施方式
21.实施例一:以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
22.如图1
‑
5所示,一种十字交叉式钢结构件间距测量设备,包括支撑座1,支撑座1上固定连接有支撑板2,且支撑板2上转动连接有支撑轴3,支撑轴3远离支撑板2的一端固定连接有框架4,框架4上固定连接有两个金属块18,且支撑板2上开设有与两个金属块18相配合的环形滑槽19,环形滑槽19中嵌设有电磁条20,且电磁条20与金属块18接触连接,支撑板2上设置有与电磁条20电性连接的继电器21,通过设置的电磁条20,可以利用电磁条20通断电的磁性变化,实现对金属块18的锁定或解锁,进而使得支撑轴3可以快速完成锁定或解锁,继电器21的设置,便于使用者控制电磁条20通断电。
23.框架4上转动连接有双向丝杠5,且双向丝杠5上螺纹连接有两个支撑块6,双向丝杠5的螺纹升角小于双向丝杠5与支撑块6间的摩擦角,且双向丝杠5的一端贯穿框架4并固定连接有转把24,双向丝杠5的螺纹升角设计,可以实现双向丝杠5与支撑块6间的自锁,以避免人工锁定的繁琐。
24.两个支撑块6均与框架4滑动连接,且两个支撑块6上均转动连接有测量臂7,两个测量臂7的中心点处转动连接,且测量臂7上开设有定位槽8,定位槽8中设置有定位座9,定位座9为中空设计,且定位座9中固定连接有支撑杆10,支撑杆10上转动连接有多个变向扇11,且定位座9上设置有与各个变向扇11相配合的驱动机构12,驱动机构12包括蜗杆121、蜗轮122和微型马达123,蜗杆121转动设置于定位座9中,且蜗杆121的一端与微型马达123传动连接,蜗轮122固定套接于变向扇11的传动轴上,且蜗轮122与蜗杆121相啮合,蜗轮122的数量与变向扇11的数量相等,通过设置的蜗杆121和各个蜗轮122的配合,可以使得各个变向扇11同步转动,避免了另外增设驱动设备所增加的成本,测量臂7上设置有与微型马达123电性连接的启闭开关26,蜗杆121的螺旋展开角大于当量摩擦角,启闭开关26,便于使用
者启闭微型马达123,蜗杆121的螺旋展开角设计,可以提高蜗杆121和蜗轮122的传导效率。
25.定位座9靠近各个变向扇11的一侧侧壁开设有多个气孔13,变向扇11的扇叶正反两面为完全反对称设计,气孔13上设置有滤网25,变向扇11的结构设计,使得变向扇11可以在正转时进行吹风,在反转时进行吸风,滤网25的设置,可以避免灰尘进入定位座9中。
26.定位槽8中设置有与驱动机构12电性连接的变向开关机构14,变向开关机构14包括滑板141、第一导电块142、第一电接块143、第二导电块144和第二电接块145,滑板141滑动设置于定位槽8中,且定位座9与滑板141固定连接,滑板141与定位槽8之间固定连接有多个复位弹簧17,第一导电块142和第二导电块144分别固定设置于滑板141的两侧,第一电接块143和第二电接块145均固定设置于定位槽8中,且第一电接块143和第二电接块145分别与第一导电块142和第二导电块144相对应,第一导电块142和第二导电块144均与微型马达123电性连接,通过设置的滑板141和复位弹簧17的配合,可以根据定位座9的对接状态,使得第一导电块142和第二导电块144自动与对应的电接块对接,进而使得微型马达123通入的电流方向可以自动进行变化,进而使得微型马达123可以自动改变转动方向。
27.其中一个支撑块6上开设有防护槽15,且防护槽15中设置有激光测距仪16,防护槽15的外侧壁上嵌设有透明板,其中一个支撑块6上设置有与激光测距仪16电性连接的按压开关22,透明板的设置,便于使用者观测防护槽15中激光测距仪16显示的数据按压开关22的设置,便于使用者启闭激光测距仪。
28.支撑座1的下端固定连接有多个万向轮23,且万向轮23能够自锁,测量臂7的各个转动点均采用阻尼转轴作为驱动件,万向轮23的设置,便于使用者移动整个装置,阻尼转轴的设置,可以利用自身的阻力特性,使得测量臂7的转动点实现自锁,以减少作业过程中一些不必要的扶持工作。
29.现对本发明的操作原理做如下描述:本装置在使用的过程中,采用蓄电池作为总电源,以避免外接电源的繁琐,当需要进行测量时,通过各个万向轮23,将装置移动至目标点,随后,转动框架4,使得框架4带动两个测量臂7进行转动,当测量臂7的角度与钢结构测量点的角度相吻合时,通过继电器21,控制电磁条20通入电流,电磁条20通电生磁后会吸合金属块18,进而锁定框架4,然后,继续移动装置,使得两个测量臂7靠接于钢结构上,接着,转动转把24,并依次控制两个启闭开关26,使得两个微型马达123启动。
30.转把24转动的过程中会带动双向丝杠5转动,双向丝杠5转动的过程中,会使得两个支撑块6相互远离,进而使得两个测量臂7可以逐渐展开,进而使得两个定位座9可以靠近对应的测量点,微型马达123启动后,会带动蜗杆121转动,在各个蜗轮122的传动下,蜗杆121会带动各个变向扇11同步转动,初始时,第一导电块142会与第一电接块143对接,使得微型马达123与装置中的第一电源连通,第一电源导入的为正向电流,使得微型马达123保持正转,进而使得各个变向扇11顺时针转动产生吹风效果,风力会通过气孔13作用于测量点上,将测量点上附着的杂质颗粒快速吹走,保证测量点的洁净。
31.当定位座9与测量点对接后,定位座9会挤压滑板141,使得第一导电块142与第一电接块143分离,并使得第二导电块144与第二电接块145对接,使得微型马达123接入第二电源的电路,第二电源导入的为逆向电流,进而使得微型马达123反转,进而使得各个变向扇11逆时针转动,产生吸风的效果,进而使得定位座9内部产生负压,配合各个气孔13,使得
定位座9可以与测量点稳固吸合,保证测量的稳定性。
32.当定位座9与测量点对接后,停止转动转把24,并通过按压开关22,启动激光测距仪16,激光测距仪16会通过激光测出两个支撑块6间的间距,根据三角形定理可知,对顶角相等,且两边均相等的两个三角形为全等三角形,进而在测出两支撑块6间的间距后,可以精准得出钢结构上两测量点的间距,具体数值,可以通过防护槽15侧壁上的透明防护板观看得出。
33.实施例二:对于图6所示的实施例二,与实施例一不同的是:防护槽15中滑动连接有滑块27,且激光测距仪16设置于滑块27上,防护槽15的一侧侧壁转动连接有螺母套28,且螺母套28中螺纹连接有螺杆29,螺杆29的一端延伸至防护槽15中设置并与滑块27固定连接,通过设置的螺母套28和螺杆29的配合,使得后期,可以通过转动螺母套28,使得螺杆29推动激光测距仪16滑出防护槽15,以便于使用者进行拆卸更换。
34.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1