基于双单线激光雷达的隧道内无人机定位系统及其方法与流程
1.本发明涉及无人机定位系统,特别是基于双单线激光雷达的隧道内无人机定位系统及其方法。
背景技术:
2.近年来,随着微机电系统的发展,多旋翼无人机的性能不断地提升,多旋翼无人机具有结构简单、机动性能好、能垂直起降和定点盘旋等优点,被广泛地应用于各个行业。大型的基础设施建设,如水电站高压输水管道和隧道等封闭的工业场景,为了保证生产和作业的安全,必须定期进行检修。针对此问题,利用无人机进行巡检成为了新的解决方案。然而,在封闭的工业场景中,存在gps信号不强甚至被屏蔽的现象,无人机无法通过gps进行定位,这给无人机在封闭空间中的导航带来了巨大的挑战。
3.目前,针对封闭空间内无人机定位的研究主要可分为以下几种方法:激光slam,视觉slam和uwb等,也有采用多传感器融合的方法。对于隧道这样的场景,其光线暗,特征一致性较高,采用视觉slam的方法会出现难以获取足够数量的特征点导致位姿估计出现较大的误差;而采用uwb定位的方法会存在信号在隧道内壁发生多次反射的问题,并且uwb定位基站的布设难度较高,其定位误差也将大大增加。
4.随着激光雷达技术的发展,激光雷达也逐渐地成为无人机进行定位感知的可行方案。常用的激光雷达可分为两类:一类是单线二维激光雷达,一类是多线三维激光雷达。由于无人机的载重量有限,考虑到多线激光雷达的重量和成本问题,采用多线激光雷达对无人机进行三维位姿估计的成本和难度较大。因此,质量较轻且成本较低的单线二维激光雷达成为了可选方案。然而,现有的二维激光雷达定位方法多用于地面移动机器人,且其定位局限于二维平面。对于隧道内飞行的无人机,其运动具有六个自由度,其定位不能只局限于二维定位。
5.综上所述,现有的隧道内无人机定位存在采用多线三维激光雷达成本高、采用单线二维激光雷达无法三维定位的问题。
技术实现要素:
6.本发明的目的在于,提供基于双单线激光雷达的隧道内无人机定位系统及其方法。本发明具有采用单线二维雷达成本低且能三维定位无人机的优点。
7.本发明的技术方案:基于双单线激光雷达的隧道内无人机定位系统,包括多旋翼无人机、机载处理器和两个正交放置的单线激光雷达;所述单线激光雷达分别设于多旋翼无人机的正上方和右侧;所述机载处理器具有处理多旋翼无人机定位算法的功能,机载处理器设于多旋翼无人机内;所述机载处理器与飞行控制器相连。
8.前述的基于双单线激光雷达的隧道内无人机定位系统中,所述设于多旋翼无人机正上方的单线激光雷达的扫描面为水平面,设于多旋翼无人机右侧的扫描面的法线与多旋翼无人机的机头方向垂直。
9.前述的基于双单线激光雷达的隧道内无人机定位系统中,所述机载处理器通过mavros与飞行控制器相连;所述飞行控制器能按要求执行隧道巡检任务。
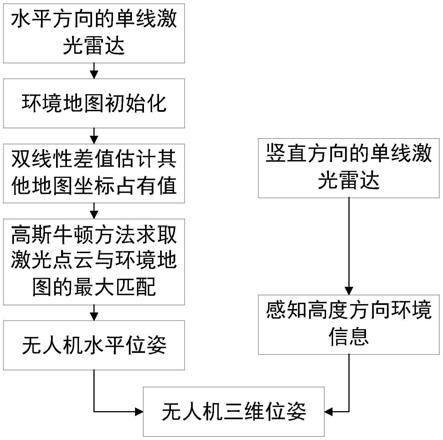
10.基于双单线激光雷达的隧道内无人机定位方法,包括如下步骤:
11.a、环境地图初始化:通过单线激光雷达完成环境地图初始化;
12.b、计算坐标占有值;
13.c、获取水平位姿;
14.d、获取垂直位姿;
15.e、获取多旋翼无人机的三维位姿。
16.前述的双单线激光雷达的隧道内无人机定位方法中,步骤a所述的环境地图初始化,其具体内容如下:
17.a1、确定原点:以多旋翼无人机的起始点为世界坐标系原点;
18.a2、获取初始点云数据:设于多旋翼无人机正上方的单线激光雷达获取初始点云数据;
19.a3、更新坐标点的占有数据;
20.a4、完成环境地图初始化:激光扫过坐标点,坐标点占有值增大,绘制激光雷达中心到扫描点的线段,完成环境地图初始化;所述扫描点即为激光扫过的坐标点。
21.前述的双单线激光雷达的隧道内无人机定位方法中,步骤b所述的计算坐标占有值,其具体内容如下:
22.b1、计算当前坐标的占有值:坐标点si(ξ)的占有值为m[si(ξ));
[0023]
b2、计算其他坐标的占有值:利用当前所建立的环境地图的占有数据,采用双线性差值方法计算其他坐标的占有值。
[0024]
前述的双单线激光雷达的隧道内无人机定位方法中,步骤c所述的获取水平位姿,其具体内容为,将点云数据与环境地图相互匹配,以高斯牛顿方法计算坐标点在环境地图中的最佳匹配位姿;其具体步骤如下:
[0025]
c1、采用高斯牛顿方法对目标函数进行优化,目标函数为
[0026]
c2、多旋翼无人机发生位移,目标函数变更为δξ为位姿增量;
[0027]
c3、求取多旋翼无人机的位姿增量δξ,求取公式为
其中
[0028][0029]
c4、根据位移前的水平位姿ξ和c4所得的位移增量δξ,得多旋翼无人机的当前水平位姿。
[0030]
前述的双单线激光雷达的隧道内无人机定位方法中,步骤d所述的获取垂直位姿,其具体内容为,通过设于多旋翼无人机右侧的单线激光雷达获取当前位置的高度和在竖直方向的环境信息,从而获取多旋翼无人机的垂直位姿。
[0031]
与现有技术相比,本发明采用的两个正交单线激光雷达,相比采用多线激光雷达的定位方法,其成本更低且重量更轻,不需要使用较大载重量的大型无人机,对多旋翼无人机的负担更小,功耗更低;
[0032]
本发明采用两个正交的单线激光雷达,不需要由其它传感器提供额外的里程计数据,单靠两个单线激光雷达即可实现对多旋翼无人机的三维定位,对于无法提供准确里程计信息且运动的自由度更多的空中飞行无人机,其适应性更好;
[0033]
本发明采用两个正交的单线激光雷达对隧道内的多旋翼无人机进行定位,相比采用视觉slam的方法,本发明对于光线较暗的隧道的适应性更好,不受环境光照强度的影响,定位的准确度和可靠性更高;
[0034]
本发明的定位方法采用高斯牛顿方法,区别于粒子滤波算法和基于图优化的方法需要较大的计算量,本定位方法的计算量更小,实时性更好,对于机载处理器性能要求更低,且输出多旋翼无人机的位姿频率更高
[0035]
综上所述,本发明具有采用单线二维雷达成本低且能三维定位无人机的优点。
附图说明
[0036]
图1是本发明的流程示意图;
[0037]
图2是m(si)计算示意图。
具体实施方式
[0038]
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
[0039]
实施例。基于双单线激光雷达的隧道内无人机定位系统,包括多旋翼无人机、机载处理器和两个正交放置的单线激光雷达;所述单线激光雷达分别设于多旋翼无人机的正上方和右侧;所述机载处理器具有处理多旋翼无人机定位算法的功能,机载处理器设于多旋
翼无人机内;所述机载处理器与飞行控制器相连。
[0040]
所述设于多旋翼无人机正上方的单线激光雷达的扫描面为水平面,设于多旋翼无人机右侧的扫描面的法线与多旋翼无人机的机头方向垂直。
[0041]
所述机载处理器通过mavros与飞行控制器相连;所述飞行控制器能按要求执行隧道巡检任务。
[0042]
基于双单线激光雷达的隧道内无人机定位方法,如图1-2所示,包括如下步骤:
[0043]
a、环境地图初始化:通过单线激光雷达完成环境地图初始化;
[0044]
b、计算坐标占有值;
[0045]
c、获取水平位姿;
[0046]
d、获取垂直位姿;
[0047]
e、获取多旋翼无人机的三维位姿。
[0048]
步骤a所述的环境地图初始化,其具体内容如下:
[0049]
a1、确定原点:以多旋翼无人机的起始点为世界坐标系原点;
[0050]
a2、获取初始点云数据:设于多旋翼无人机正上方的单线激光雷达获取初始点云数据;
[0051]
a3、更新坐标点的占有数据;
[0052]
a4、完成环境地图初始化:激光扫过坐标点,坐标点占有值增大,绘制激光雷达中心到扫描点的线段,完成环境地图初始化;所述扫描点即为激光扫过的坐标点。
[0053]
步骤b所述的计算坐标占有值,其具体内容如下:
[0054]
b1、计算当前坐标的占有值:坐标点si(ξ)的占有值为m(si(ξ));
[0055]
b2、计算其他坐标的占有值:利用当前所建立的环境地图的占有数据,采用双线性差值方法计算其他坐标的占有值。
[0056]
m(si(ξ))的计算方法如附图2所示:在环境地图中有一点si,已知其最邻近点s
(0,0)
~s
(1,1)
的坐标和占有值,则|m(si)的计算公式为,
[0057][0058]
步骤c所述的获取水平位姿,其具体内容为,将点云数据与环境地图相互匹配,以高斯牛顿方法计算坐标点在环境地图中的最佳匹配位姿;其具体步骤如下:
[0059]
c1、以环境地图中坐标点的占有率为目标函数,采用高斯牛顿方法对目标函数进行优化,目标函数为ξ为多旋翼无人机的水平位姿点,具体为ξ=(p
x
,py,ψ)
t
;si(ξ)为激光点在世界坐标系下的坐标,可将激光扫描点通过刚体旋转和平移变换获得;
[0060]
m(si(ξ))为该点的占有值,范围在0到1之间,可根据最邻近点估算获得;
[0061]
c2、多旋翼无人机发生位移,目标函数变更为δξ为位移增量;
[0062]
c3、求取多旋翼无人机的位移增量δξ,求取公式为其中
[0063][0064][0065]
c4、根据位移前的水平位姿ξ和c4所得的位移增量δξ,得多旋翼无人机的当前水平位姿。
[0066]
步骤d所述的获取垂直位姿,其具体内容为,通过设于多旋翼无人机右侧的单线激光雷达获取当前位置的高度和在竖直方向的环境信息,从而获取多旋翼无人机的垂直位姿。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1