一种激光雷达倾斜摄影测量装置及其测绘方法与流程
1.本技术涉及激光雷达及摄影测绘领域,尤其是涉及一种激光雷达倾斜摄影测量装置及其测绘方法。
背景技术:
2.测绘,是指对自然地理要素或者地表人工设施的形状、大小、空间位置及其属性等进行测定、采集并绘制成图,可供工程建设、规划设计和行政管理之用。并且随着无人机的技术的不断发展,航空测绘手段大行其道,通过将测绘装置安装在无人机上,能对待测绘区域进行精度高达5cm的精准测量。
3.相关技术中公开号为cn111880562a的中国专利文献,提出了一种基于激光雷达的无人机仿地飞行装置;包括无人机本体、高清摄像机和激光雷达,无人机本体的上表面设置有控制模块,无人机本体的下表面连接有降落架框。
4.相关技术中公开号为cn111928824a的中国专利文献,提出了一种结合激光雷达和倾斜摄影的工程勘察方法,包括以下步骤:选择目标建筑物彼此相对的两侧分别作为起点、终点,提供搭载有激光扫描仪和倾斜摄影相机的无人机,使无人机沿着至少两条不同的预设航线从起点飞行至终点,分别通过激光扫描仪获取激光点云数据和倾斜影像数据,再进行处理生成三维实景模型。
5.针对上述中的相关技术,发明人认为存在有以下缺陷:将激光雷达和高清摄像机集成为测绘装置安装在无人机上并采用倾斜摄影方式时,高清摄像机的倾斜角度将直接影响测绘结果的精准度,一般在无人机起飞前都会将测绘装置调试好,确保测绘装置中高清摄像机的倾斜角度与无人机水平系统夹角恒定,故而多会采用栓接、卡接等硬连接方式,而无人机升空后不同高度气流稳定性难以预测,使得无人机在飞行过程中发生晃动或抖动现象,进而引发测绘装置的晃动或抖动,即使加装减振装置,也依然较难始终保证调试初期的倾斜角度,从而影响测绘装置最终的测绘精度。
技术实现要素:
6.为了改善测绘装置发生晃动后较难快速恢复设定倾斜角度的问题,本技术提供一种激光雷达倾斜摄影测量装置及其测绘方法。
7.本技术第一方面提供的一种激光雷达倾斜摄影测量装置采用如下的技术方案:一种激光雷达倾斜摄影测量装置,包括测量装置本体及用于与载具连接的安装座,所述测量装置本体上可拆连接有安装板,所述安装板与所述安装座球铰接,所述安装板与所述安装座之间设置有多个减振复位机构;所述减振复位机构包括第一减振组件和第二减振组件;所述第一减振组件包括滑动连接的滑杆和套筒,所述滑杆和所述套筒相远离的一端分别与所述安装座和所述安装板铰接,所述滑杆弹性设置在所述套筒内,所述套筒上设置有用于驱使所述滑杆精准复位至初始位置的校准件;
所述第二减振组件包括铰接在所述套筒上的连杆,所述连杆远离所述套筒的一端滑动设置在所述安装座上,所述套筒呈倾斜设置在所述安装座和所述安装板之间,所述安装座上设置有用于实现所述连杆端部弹性设置在所述安装座上的第二减振件。
8.通过采用上述技术方案,测绘前将测量装置本体安装至安装板上后,再将安装座安装在无人机上,当无人机遭遇气流扰动发生抖动或晃动时,自重较大的测量装置本体带动安装板在安装座上摆动,从而推动滑杆在套筒内滑动,弹性设置在套筒内的滑杆可对安装板的晃动起到缓冲作用,并且套筒上连接的连杆通过第二减振件在安装座上的弹性滑动,也能对套筒摆动的角度起到一定的缓冲作用,从而通过第一减振组件和第二减振组件的设置大幅削弱了无人机发生抖动或晃动时对安装板上测量装置本体的影响,有效避免了测量装置本体跟随无人机晃动造成的高清摄像机预设倾斜角度变化幅度大、难以快速修正的问题。
9.而第一减振组件和第二减振组件对测量装置本体的晃动幅度削弱后,校准件即驱使滑杆精准复位至初始位置,可使测量装置本体中的高清摄像机倾斜角度快速且精准地恢复至设定值,尽可能确保了测量装置本体的测量精度。
10.可选的,所述校准件包括设置在所述套筒内的复位块,所述复位块侧边固接有多个复位钩,所述滑杆位于所述套筒内的端部铰接有多个与多个所述复位钩一一钩合适配的复位扣,所述复位扣朝向所述复位钩的部位固接有外凸部朝向所述复位钩的簧片。
11.通过采用上述技术方案,安装板在安装座上晃动时,滑杆在套筒内滑动,具体表现为部分滑杆滑入套筒中、对侧方向的滑杆滑出套筒;对于具有滑出套筒趋势的滑杆,其上的复位扣上的簧片抵触在复位钩上发生形变;对于具有滑入套筒趋势的滑杆,其上的复位扣脱离与复位钩的抵触;则滑杆在其在套筒中受到的弹性形变力及形变的簧片形变力的双重作用下,多个滑杆均分别在多个套筒内迅速修正至初始位置,并且多个复位扣均分别抵紧在多个复位钩上,能对安装板在安装座上的安装角度进行定位,从而实现了安装板在遭受晃动后的快速、精准复位,有利于测量装置本体的快速、精准修正。
12.可选的,所述复位钩自由端朝背离所述滑杆的方向延伸,且其延伸部长度不小于所述滑杆在所述套筒内的最大滑动距离。
13.通过采用上述技术方案,复位钩上的延长部能对复位扣起到导向作用,可确保复位扣脱离与复位钩根部抵触后始终靠拢在复位块上,有利于滑杆在套筒内精准修正至初始位置。
14.可选的,所述复位块防转滑动设置在所述套筒内且其滑动方向沿所述套筒轴向,所述复位块上设置有用于锁止所述复位块于所述套筒上的锁止部件。
15.通过采用上述技术方案,可实现复位块在套筒内位置的改变,可改变复位钩与复位扣钩合抵接后滑杆在套筒中的位置,能实现安装板在安装座上发生晃动后复位至初始位置时该初始位置的调整,使得安装板在安装座上的安装位置不仅仅局限于一种安装状态,在实际使用时能对测量装置中高清摄像机的倾斜角度进行小幅度校准。
16.可选的,所述锁止部件包括转动设置在所述套筒底壁上的锁止螺杆,所述锁止螺杆螺纹贯穿所述复位块,所述套筒侧壁上设置有用于驱使所述锁止螺杆旋转的转动件。
17.通过采用上述技术方案,转动转动件以驱使锁止螺杆旋转,锁止螺杆旋转时可带动与之螺纹连接的复位块在套筒内移动,并且停止驱使锁止螺杆旋转后,锁止螺杆还能实
现对复位块的锁止效果,有利于实现滑杆在套筒内的精准定位。
18.可选的,所述第二减振件包括防脱滑动设置在所述安装座上的滑块,所述连杆远离所述套筒的一端铰接在所述滑块上,所述滑块滑移方向的一侧与所述安装板之间设置有弹性件。
19.通过采用上述技术方案,滑杆在套筒内滑动时,套筒与安装板之间的夹角发生变化,进而连杆与套筒之间的夹角对应改变,使得连杆端部铰接的滑块在安装座上滑动,弹性件发生形变,可对滑块在安装座上的滑动形成缓冲效果,进而实现安装座在发生晃动时对安装板的减振效果。
20.可选的,所述安装板背离所述安装座的一侧固接有两个分列其两相对侧边的导轨,所述测量装置本体上固接有滑板,所述滑板滑动设置在两个所述导轨之间;所述安装板于靠近所述导轨一端铰接有锁止齿条,所述滑板边侧固接有与所述锁止齿条啮合适配的被锁齿条,所述安装板上设置有用于驱使所述锁止齿条朝背离邻近的所述导轨的方向翻转的复位件;所述安装板上设置有联动组件,所述滑板插入两个所述导轨之间时通过所述联动组件间歇驱使所述锁止齿条朝靠近邻近的所述导轨的方向翻转。
21.通过采用上述技术方案,在安装板上安装测量装置本体时,先将滑板滑入两个导轨之间,此时在联动组件的作用下,锁止齿条先朝靠近邻近的导轨的方向翻转,滑板可顺畅插入两个导轨深处;当滑板行进至联动组件无法驱使锁止齿条翻转时,锁止齿条在复位件的驱动下朝背离邻近的导轨的方向转动并与滑板上的被锁齿条形成啮合连接,实现对滑板的锁止,从从而实现了测量装置本体在安装板上的快捷安装,并且安装过程不会对测量装置本体与安装板之间的平行度造成影响,尽可能确保了测量装置本体中高清摄像头预设倾斜角度的稳定性。
22.可选的,所述联动组件包括转动设置在所述安装板上的第一圆盘和第二圆盘,所述第一圆盘和所述第二圆盘同轴固接;所述第一圆盘弧面外周壁上等间距固接有多个第一弧形齿条,所述第二圆盘弧面外周壁上等间距固接有多个第二弧形齿条;所述第一弧形齿条与所述被锁齿条啮合适配,所述锁止齿条自由端固接有与所述第二弧形齿条啮合适配的解锁齿条;所述第一弧形齿条的数量为所述第二弧形齿条数量的一半,相邻两个所述第二弧形齿条之间的间隙不小于所述解锁齿条的弧边长;且当所述第二弧形齿条刚脱离与所述解锁齿条的啮合连接时,所述第一弧形齿条也脱离与所述被锁齿条的啮合连接。
23.通过采用上述技术方案,滑板插入至两个导轨之间时,护板侧边的被锁齿条与第一圆盘上的第一弧形齿条啮合,随着滑板在导轨中的滑动,可带动第一圆盘旋转,第一圆盘旋转时带动第二圆盘旋转,第二圆盘旋转时通过其上的第二弧形齿条与解锁齿条的啮合连接带动锁止齿条朝靠近邻近的导轨的方向翻转,此时滑板可顺利插入导轨深处;当第二圆盘旋转至其上的第二弧形齿条与解锁齿条脱离啮合时,锁止齿条在复位件的作用下朝远离邻近的导轨的方向翻转,以与被锁齿条实现啮合连接,从而实现对滑板的锁止,此时滑板被牢固锁定在安装板上无法移动,实现了测量装置本体的便捷安装。
24.当需要拆除测量装置本体时,手动转动第一圆盘,由于此时第一圆盘上相邻两第一弧形齿条之间间距较大,被锁齿条不会对第一圆盘的转动造成限制,因而第二圆盘跟随
第一圆盘旋转,且第二圆盘上的下一第二弧形齿条与解锁齿条形成啮合连接,从而随着第一圆盘的继续旋转,锁止齿条被驱使朝靠近邻近的导轨的方向翻转,锁止齿条脱离与被锁齿条的啮合状态,此时可将滑板自导轨中滑出,实现了测量装置本体的便捷拆卸效果。
25.可选的,所述第一圆盘或所述第二圆盘上同轴固接有贯穿至所述导轨或所述安装板外部的转轴,所述转轴自由端固接有拨块。
26.通过采用上述技术方案,拨动拨块可带动转轴旋转,进而带动第一圆盘旋转,可实现检测装置本体拆卸时的便捷操作。
27.本技术第二方面提供的一种激光雷达倾斜摄影测绘方法采用如下的技术方案:一种激光雷达倾斜摄影测绘方法,基于上述的一种激光雷达倾斜摄影测量装置实现,包括以下步骤:s1.地面基准站架设,在待测绘区域架设基准站,并测算天线高;s2.设备安装,将所述测量装置本体安装至所述安装板上,再将所述安装座安装至无人机的载荷板上;s3.航线规划,根据待测绘地区地貌规划航线并导入无人机飞行平台航线规划软件中;s4.初始化定位,在设定的起飞点进行无人机定位搜星和初始化定位;s5.飞行采集,无人机升空并按设定飞行航线飞行以进行数据采集;s6.数据解算,将无人机采集到的数据通过pos数据融合解算,并转换为激光点云成果。
28.综上所述,本技术包括以下至少一种有益技术效果:1.当无人机遭遇气流扰动发生抖动或晃动时,自重较大的测量装置本体带动安装板在安装座上摆动,弹性设置在套筒内的滑杆可对安装板的晃动起到缓冲作用,并且套筒上连接的连杆通过第二减振件在安装座上的弹性滑动,也能对套筒摆动的角度起到一定的缓冲作用,并且第一减振组件和第二减振组件对测量装置本体的晃动幅度削弱后,校准件即驱使滑杆精准恢复至初始位置,可使测量装置本体中的高清摄像机倾斜角度快速且精准地恢复至设定值,尽可能确保了测量装置本体的测量精度;2.安装板在安装座上晃动时,一部分滑杆上的复位扣脱离与复位钩的抵触,另一部分滑杆上复位扣上的簧片抵触在复位钩上发生形变,滑杆在其在套筒中受到的弹性形变力及形变的簧片形变力的双重作用下,多个滑杆均分别在多个套筒内迅速修正至初始位置,并且多个复位扣均分别抵紧在多个复位钩上,能对安装板在安装座上的安装角度进行定位,从而实现了安装板在遭受晃动后的快速、精准复位,有利于测量装置本体的快速、精准修正;3.在安装板上安装检测装置本体时,滑板在两个导轨间滑动,可带动第一圆盘和第二圆盘同步旋转,第二弧形齿条与解锁齿条的啮合连接带动锁止齿条朝靠近邻近的导轨的方向翻转,此时滑板可顺利插入导轨深处;当第二圆盘旋转至其上的第二弧形齿条与解锁齿条脱离啮合时,锁止齿条在复位件的作用下朝远离邻近的导轨的方向翻转,以与被锁齿条实现啮合连接,从而实现对滑板的锁止,此时滑板被牢固锁定在安装板上无法移动,实现了测量装置本体的便捷安装,同时安装过程不会对测量装置本体与安装板之间的平行度造成影响,尽可能确保了测量装置本体中高清摄像头预设倾斜角度的稳定性。
附图说明
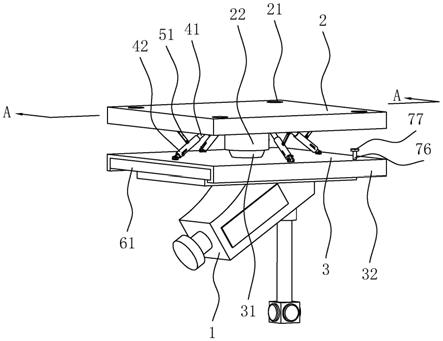
29.图1是本技术实施例的整体结构示意图。
30.图2是沿图1中a-a线的剖视图。
31.图3是图2中b部分的局部放大示意图。
32.图4是本技术实施例主要用于展示第一减振组件的局部剖视图。
33.图5是本技术实施例主要用于展示锁定组件的结构示意图。
34.图6是本技术实施例激光雷达倾斜摄影测绘方法的流程示意图。
35.附图标记:1、测量装置本体;2、安装座;21、安装孔;22、球座;3、安装板;31、球头;32、导轨;41、滑杆;411、垫片;42、套筒;421、安置槽;431、复位块;432、复位钩;433、复位扣;434、簧片;435、锁止螺杆;441、限定块;442、滑槽;451、蜗轮;452、蜗杆;51、连杆;52、滑块;53、导杆;54、弹性件;61、滑板;611、豁口;62、锁止齿条;63、被锁齿条;64、复位件;71、第一圆盘;72、第二圆盘;73、第一弧形齿条;74、第二弧形齿条;75、解锁齿条;76、转轴;77、拨块。
具体实施方式
36.以下结合附图1-6对本技术作进一步详细说明。
37.本技术实施例公开一种激光雷达倾斜摄影测量装置。参照图1,激光雷达倾斜摄影测量装置包括测量装置本体1及用于与载具连接的安装座2,安装座2上贯穿开设有多个用于穿设螺栓的安装孔21。测量装置本体1上可拆连接有安装板3,安装板3与安装座2球铰接,具体的,安装座2中部固接有球座22,安装板3中部固接有嵌入球座22中的球头31。安装板3与安装座2之间设置有多个减振复位机构,多个减振复位机构以球座22垂直于安装座2的中轴线呈等间距圆周阵列分布,并且减振复位机构包括第一减振组件和第二减振组件。
38.其中,参照图2和图3,第一减振组件包括滑动连接的滑杆41和套筒42,滑杆41和套筒42相远离的一端分别与安装座2和安装板3铰接,具体的,套筒42铰接在安装板3上,滑杆41铰接在安装座2上;滑杆41弹性设置在套筒42内,套筒42上设置有用于驱使滑杆41精准复位至初始位置的校准件。具体设置时,参照图4,套筒42背离安装板3的一端开同轴开设有安置槽421,安置槽421内径大于套筒42内径,安置槽421内设置有弹簧,滑杆41穿过弹簧中空部并延伸至套筒42内,且滑杆41弧面外壁上固接有抵触在弹簧远离安置槽421底壁一端的垫片411,弹簧一端与安置槽421底壁固接、另一端与垫片411固接。
39.从而,测绘前将测量装置本体1安装至安装板3上后,再将安装座2安装在无人机上,当无人机遭遇气流扰动发生抖动或晃动时,自重较大的测量装置本体1带动安装板3在安装座2上摆动,从而推动滑杆41在套筒42内滑动,滑杆41上的垫片411在安置槽421内421滑动,弹簧被压缩或拉伸产生形变,可对滑杆41起到缓冲作用,进而对安装板3及其上的检测装置本体的晃动起到缓冲、减振作用,有效降低了无人机发生抖动或晃动时安装板3上测量装置本体1跟随晃动的幅度,有助于测量装置本体1上高清摄像机倾斜角度的快速修正。
40.更进一步的,参照图1和图2,第二减振组件包括铰接在套筒42上的连杆51,连杆51远离套筒42的一端滑动设置在安装座2上,套筒42呈倾斜设置在安装座2和安装板3之间,安装座2上设置有用于实现连杆51端部弹性设置在安装座2上的第二减振件。具体的,第二减振件包括防脱滑动设置在安装座2上的滑块52,连杆51远离套筒42的一端铰接在滑块52上,滑块52滑移方向的一侧与安装板3之间设置有弹性件54,弹性件54设置为弹簧。
41.在一种可行的实施方式中,滑块52设置为t型块,安装座2靠近安装板3的一侧开设有长度方向延长线过安装座2中心的t型槽,滑块52滑动设置在t型槽内可实现滑块52在安装座2上的防脱滑动,弹性件54设置在t型槽内且位于滑块52远离安装座2中部的一侧。
42.在另一可行的实施方式中,安装座2靠近安装板3的一侧间隙固定有轴线过安装座2中心的导杆53,滑块52和弹性件54均套设在导杆53上,弹性件54设置在滑块52远离安装座2中部的一侧。
43.在其他可行的实施方式中还可以为上述两种方案的结合。
44.从而当安装板3在安装座2上晃动时,滑杆41在套筒42内滑动,套筒42与安装板3之间的夹角发生变化,进而连杆51与套筒42之间的夹角对应改变,使得连杆51端部铰接的滑块52在安装座2上滑动,弹性件54发生形变,可对滑块52在安装座2上的滑动形成缓冲效果,进而实现安装座2在发生晃动时对安装板3的减振效果。
45.因此在第一减振组件和第二减振组件对安装板3上测量装置本体1的联合减振效果下,大幅削弱了无人机发生抖动或晃动时安装板3上测量装置本体1跟随晃动的幅度,有效避免了测量装置本体1跟随无人机晃动造成的高清摄像机预设倾斜角度变化幅度大、难以快速修正的问题;而当安装板3晃动以致滑杆41在套筒42内滑动后,校准件即驱使滑杆41精准复位至初始位置,可使测量装置本体1中的高清摄像机倾斜角度快速且精准地恢复至设定值,尽可能确保了测量装置本体1在无人机抖动或晃动状态下的测量精度。
46.为实现滑杆41能精准复位至初始状态,参照图3 和图4,校准件包括设置在套筒42内的复位块431,复位块431沿套筒42轴向的侧边固接有多个复位钩432,滑杆41位于套筒42内的端部铰接有多个与多个复位钩432一一对应钩合适配的复位扣433;具体设置时,复位钩432和复位扣433均对应设置有两个且以滑杆41轴线呈对称设置。同时复位块431背离滑杆41的一端周侧呈收口状,复位钩432自由端朝背离滑杆41的方向延伸且与复位块431斜面周侧间预留用于复位扣433移动的间隙,且复位钩432延伸部的长度不小于滑杆41在套筒42内的最大滑动距离,并且复位扣433朝向复位钩432的部位还固接有外凸部朝向复位钩432的簧片434。
47.从而,安装板3在安装座2上晃动时,滑杆41在套筒42内滑动,具体表现为一部分滑杆41滑入套筒42中、对侧方向的另一部分滑杆41滑出套筒42;对于具有滑出套筒42趋势的滑杆41,其上的复位扣433上的簧片434抵触在复位钩432上发生形变;对于具有滑入套筒42趋势的滑杆41,其上的复位扣433脱离与复位钩432的抵触,复位钩432上的延长部对复位扣433起导向作用,可确保复位扣433脱离与复位钩432根部抵触后始终靠拢在复位块431上。则滑杆41在其在套筒42中受到的弹性形变力及形变的簧片434形变力的双重作用下,多个滑杆41均分别在多个套筒42内迅速修正至初始位置,并且多个复位扣433均分别抵紧在多个复位钩432上,能对安装板3在安装座2上的安装角度进行定位,从而实现了安装板3在遭受晃动后的快速、精准复位,有利于测量装置本体1的快速、精准修正。
48.在实际使用中,由于安装板3和安装座2为球铰接,若安装板3和安装座2之间的安装角度可调,也能实现对测量装置中高清摄像机倾斜角度的微调或校准。因此,参照图3和图4,复位块431防转滑动设置在套筒42内且其滑动方向沿套筒42轴向,具体的,复位块431两相对侧均固接有限定块441,套筒42弧面外壁上贯穿开设有两个与两个限定块441一一对应且滑移适配的滑槽442,滑槽442沿套筒42轴向设置,且限定块441截面为矩形。复位块431
上设置有用于锁止复位块431于套筒42上的锁止部件,具体的,锁止部件包括转动设置在套筒42底壁上的锁止螺杆435,锁止螺杆435螺纹贯穿复位块431,套筒42侧壁上设置有用于驱使锁止螺杆435旋转的转动件,转动件设置为同轴固接在锁止螺杆435上的蜗轮451以及转动设置在套筒42上且与蜗轮451啮合连接的蜗杆452。
49.从而转动蜗杆452可通过蜗轮451带动锁止螺杆435旋转,进而带动复位块431在套筒42内的移动,限定块441在滑槽442内滑动能实现对滑动中的复位块431的稳定导向效果;从而复位块431在套筒42内位置改变后,可改变复位钩432与复位扣433钩合抵接后滑杆41在套筒42中的位置,能实现安装板3在安装座2上发生晃动后复位至初始位置时该初始位置的调整,使得安装板3在安装座2上的安装位置不仅仅局限于一种安装状态,在实际使用时能对测量装置中高清摄像机的倾斜角度进行小幅度校准。
50.同时将测量装置本体1安装至安装板3上时,由于安装板3与安装座2之间的安装角度可以通过减振复位机构进行校准和限定,安装板3与安装座2之间的连接偏差可以忽略不记,但是若测量装置本体1与安装板3之间的连接采用栓接方式,多次拆装后,可能会导致安装板3螺接部发生轻微扭曲,进而导致测量装置本体1安装在安装座2上的连接偏差,也会对测量装置本体1的测绘精度造成影响,需要测量装置本体1与安装板3连接时不能产生二者之间平行度的误差。
51.因而,参照图1和图5,安装板3背离安装座2的一侧固接有两个分列其两相对侧边的导轨32,测量装置本体1上固接有滑板61,导轨32横截面呈“l”字形且其水平段平行于安装板3板面、竖直段长度与滑板61厚度适配,测量装置本体1通过滑板61和两个导轨32滑动设置在安装板3上。安装板3与滑板61之间设置有用于锁紧滑板61于安装板3上的锁定组件,锁定组件可以设置在滑板61单侧,也可以设置两组并分列滑板61两相对侧。
52.参照图5,锁定组件包括铰接在安装板3靠近导轨32一端的锁止齿条62,锁止齿条62主体呈弯折状且其齿部平齐,滑板61一端边侧设有豁口611且于豁口611边缘固接有与锁止齿条62啮合适配的被锁齿条63,安装板3上设置有用于驱使锁止齿条62朝背离邻近的导轨32的方向翻转的复位件64。复位件64可以为设置在锁止齿条62与邻近的导轨32之间的弹簧,且复位件64一端与锁止齿条62固接、另一端与导轨32内壁固接;复位件64也可以设置为套接在锁止齿条62与安装板3铰接轴上的扭簧。
53.同时,安装板3上设置有联动组件,滑板61插入两个导轨32之间时通过联动组件间歇驱使锁止齿条62朝靠近邻近的导轨32的方向翻转,具体的,参照图5,联动组件包括转动设置在安装板3上的第一圆盘71和第二圆盘72,第一圆盘71和第二圆盘72同轴固接;第一圆盘71弧面外周壁上等间距固接有多个第一弧形齿条73,第二圆盘72弧面外周壁上等间距固接有多个第二弧形齿条74;第一弧形齿条73与被锁齿条63啮合适配,锁止齿条62自由端固接有与第二弧形齿条74啮合适配的解锁齿条75。以上可以合理理解为锁止齿条62、被锁齿条63、第一圆盘71及其上的第一弧形齿条73共面,解锁齿条75、第二圆盘72及其上的第二弧形齿条74共面。
54.并且,第一弧形齿条73的数量为第二弧形齿条74数量的一半,相邻两个第二弧形齿条74之间的间隙不小于解锁齿条75的弧边长,具体实施时,第一弧形齿条73设置两个,第二弧形齿条74设置四个;且当第二弧形齿条74刚脱离与解锁齿条75的啮合连接时,第一弧形齿条73也脱离与被锁齿条63的啮合连接。
55.其中,第一圆盘71和第二圆盘72的外径可以相同、也可以不同,但为使滑板61在被锁止前能插入导轨32中的位置更深,第一圆盘71的外径大于第二圆盘72外径,则被锁齿条63即滑板61在安装板3上的可滑动距离远大于锁止齿条62抬起的距离,能尽可能提高被锁齿条63的实际设计长度,从而加强被锁齿条63与锁止齿条62啮合时的锁止效果。
56.如此设置后,滑板61插入至两个导轨32之间时,护板侧边的被锁齿条63与第一圆盘71上的第一弧形齿条73啮合,随着滑板61向导轨32深处的滑动,第一圆盘71在被锁齿条63和第一弧形齿条73的啮合传动下旋转,第一圆盘71旋转时带动第二圆盘72旋转,第二圆盘72旋转时通过其上的第二弧形齿条74与解锁齿条75的啮合连接带动锁止齿条62朝靠近邻近的导轨32的方向翻转,此时滑板61可顺利插入导轨32深处。
57.当第二圆盘72旋转至其上的第二弧形齿条74与解锁齿条75脱离啮合时,锁止齿条62在复位件64的作用下朝远离邻近的导轨32的方向翻转,以与被锁齿条63实现啮合连接,从而实现对滑板61的锁止,此时滑板61被牢固锁定在安装板3上无法移动,实现了测量装置本体1的便捷安装。
58.当需要拆除测量装置本体1时,手动转动第一圆盘71,由于此时第一圆盘71上相邻两第一弧形齿条73之间间距较大,被锁齿条63不会对第一圆盘71的转动造成限制,因而第二圆盘72跟随第一圆盘71旋转,且第二圆盘72上的下一第二弧形齿条74与解锁齿条75形成啮合连接,从而随着第一圆盘71的继续旋转,锁止齿条62被驱使朝靠近邻近的导轨32的方向翻转,锁止齿条62脱离与被锁齿条63的啮合状态,此时可将滑板61自导轨32中滑出,实现了测量装置本体1的便捷拆卸效果。
59.从而在整个安装和拆卸过程中,不会对滑板61与安装板3之间的平行度造成影响,尽可能确保了测量装置本体1中高清摄像头预设倾斜角度的稳定性。
60.而为提升拆卸滑板61时的便捷度,第一圆盘71或第二圆盘72上同轴固接有贯穿至导轨32或安装板3外部的转轴76,转轴76自由端固接有拨块77。在本技术实施例中,转轴76固接在第一圆盘71上且贯穿至安装板3与安装座2之间,可对拨块77实现一定程度的防护,以防裸露在外的拨块77被意外拨动造成锁止齿条62对滑板61的解锁。
61.本技术实施例还公开一种激光雷达倾斜摄影测绘方法。参照图6,激光雷达倾斜摄影测绘方法包括以下步骤:s1.地面基准站架设,在待测绘区域架设基准站,并测算天线高;s2.设备安装,将所述测量装置本体1安装至所述安装板3上,再将所述安装座2安装至无人机的载荷板上;s3.航线规划,根据待测绘地区地貌规划航线并导入无人机飞行平台航线规划软件中;s4.初始化定位,在设定的起飞点进行无人机定位搜星和初始化定位;s5.飞行采集,无人机升空并按设定飞行航线飞行以进行数据采集;s6.数据解算,将无人机采集到的数据通过pos数据融合解算,并转换为激光点云成果。
62.本技术实施例一种激光雷达倾斜摄影测量装置及其测绘方法的实施原理为:当无人机遭遇气流扰动发生抖动或晃动时,自重较大的测量装置本体1带动安装板3在安装座2上摆动,弹性设置在套筒42内的滑杆41可对安装板3的晃动起到缓冲作用,并且套筒42上连
接的连杆51通过滑块52在安装座2上的弹性滑动,也能对套筒42摆动的角度起到一定的缓冲作用,在第一减振组件和第二减振组件对安装板3上测量装置本体1的联合减振效果下,大幅削弱了无人机发生抖动或晃动时安装板3上测量装置本体1跟随晃动的幅度,有效避免了测量装置本体1跟随无人机晃动造成的高清摄像机预设倾斜角度变化幅度大、难以快速修正的问题。
63.而在此过程中,滑杆41在其在套筒42中受到的弹性形变力及形变的簧片434形变力的双重作用下,多个滑杆41均分别在多个套筒42内迅速修正至初始位置,并且多个复位扣433均分别抵紧在多个复位钩432上,能对安装板3在安装座2上的安装角度进行定位,从而实现了安装板3在遭受晃动后的快速、精准复位,有利于测量装置本体1的快速、精准修正。
64.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1