基于卫星定位的旋转控制平台的制作方法
1.本发明涉及卫星定位领域,尤其涉及一种基于卫星定位的旋转控制平台。
背景技术:
2.卫星定位技术是利用人造地球卫星进行点位测量的技术。早期,人造地球卫星仅仅作为一种空间的观测目标,这种对卫星的几何观测能够解决用常规大地测量难以实现的远距离陆地海岛联测定位的问题。但是这种方法费时费力,不仅定位精度低,而且不能测得点位的地心坐标。全球定位系统是一个由覆盖全球的24颗卫星组成的卫星系统。这个系统可以保证在任意时刻,地球上任意一点都可以同时观测到4颗卫星,以保证卫星可以采集到该观测点的经纬度和高度,以便实现导航、定位、授时等功能。这项技术可以用来引导飞机、船舶、车辆以及个人,安全、准确地沿着选定的路线,准时到达目的地。
3.目前,在采用挖坑器械对其下方地面执行挖坑操作时,需要在确认是土壤时方执行相应的挖坑处理,如果是其他类型地面,例如水泥地面,一方面会导致与挖坑器械的挖坑部件强度和韧度的不匹配,容易损坏挖坑部件,另一方面会容易崩起碎块,对周围器械和人员造成伤害。
技术实现要素:
4.为了解决上述问题,本发明提供了一种基于卫星定位的旋转控制平台,能够在卫星定位数据与土壤类型和土壤颜色成像特征的匹配关系的基础上,完成基于视觉检测的土壤的确认以及土壤类型的确认,从而在保证现场安全的同时,为后续的挖坑控制提供相应的挖坑策略。
5.相比较于现有技术,本发明具备以下几处突出的实质性特点:
6.(1)基于当前挖坑主体所在位置的定位数据提供应对应的土壤类型和土壤颜色特征,为后续的土壤的确认和挖掘策略的确认提供关键数据;
7.(2)基于当前挖坑主体下方地面的成像数据的颜色特征与定位数据提供应对应的土壤颜色特征的匹配关系确认待挖掘的土壤类型和相应的挖掘策略,从而提升土壤挖掘控制的智能化水平。
8.根据本发明的一方面,提供了一种基于卫星定位的旋转控制平台,所述平台包括:
9.映射存储机构,用于存储不同卫星定位数据分别对应的设定土壤颜色和设定土壤类型,每一卫星定位数据对应的设定土壤颜色为所述卫星定位数据对应地球位置的土壤的各个颜色通道的各个数值范围。
10.更具体地,在所述基于卫星定位的旋转控制平台中:
11.每一卫星定位数据对应的设定土壤颜色为所述卫星定位数据对应地球位置的土壤的各个颜色通道的各个数值范围包括:所述卫星定位数据对应地球位置的土壤的各个颜色通道的各个数值范围包括rgb颜色空间下的r通道数值范围、g通道数值范围和b通道数值范围。
12.更具体地,在所述基于卫星定位的旋转控制平台中,所述平台还包括:
13.针对性挖坑主体,包括左侧固定架构、右侧固定架构、拼接板体、旋转头部、旋转控制电机、左侧支撑脚架和右侧支撑脚架,所述左侧固定架构和所述右侧固定架构分别设置在所述左侧支撑脚架和所述右侧支撑脚架上,所述拼接板体左侧固定在所述左侧固定架构的右端、右侧固定在所述右侧支撑脚架的左端,用于将所述左侧固定架构和所述右侧固定架构固定成一个整体,所述旋转头部穿过所述拼接板体的中央位置且朝向所述左侧支撑脚架和所述右侧支撑脚架之间的地面,所述旋转控制电机与所述旋转头部连接,用于控制所述旋转头部的旋转速度;
14.即时定位设备,设置在所述拼接板体内,用于获取所述针对性挖坑主体当前位置对应的当前卫星定位数据;
15.数据抓拍机构,封装在所述旋转头部的中央位置,用于在所述旋转控制电机启动对所述旋转头部的旋转控制之前,实现对所述左侧支撑脚架和所述右侧支撑脚架之间的地面的现场抓拍操作,以获得对应的现场抓拍图像;
16.实时增强机构,与所述数据抓拍机构连接,用于对接收到的现场抓拍图像执行边缘增强处理和盒式滤波处理,以获得对应的实时增强图像;
17.通道提取机构,与所述实时增强机构连接,用于获取所述实时增强图像中每一个像素点在rgb颜色空间下的r通道数值、g通道数值和b通道数值,并对所述实时增强图像中各个像素点分别对应的各个r通道数值执行算术平均值计算以获得r通道均值,对所述实时增强图像中各个像素点分别对应的各个g通道数值执行算术平均值计算以获得g通道均值,以及对所述实时增强图像中各个像素点分别对应的各个b通道数值执行算术平均值计算以获得b通道均值;
18.类型提取设备,分别与所述即时定位设备和所述映射存储机构连接,用于在所述映射存储机构中查找与当前卫星定位数据对应的设定土壤类型,并查找与当前卫星定位数据对应的r通道数值范围、g通道数值范围和b通道数值范围以分别作为r通道参考数值范围、g通道参考数值范围和b通道参考数值范围;
19.信号解析设备,分别与所述类型提取设备和所述通道提取机构连接,用于在r通道均值在r通道参考数值范围内、g通道均值在g通道参考数值范围内以及b通道均值在b通道参考数值范围内时,发出第一控制信号,否则,发出第二控制信号;
20.其中,所述旋转控制电机还与所述信号解析设备连接,用于在接收到所述第一控制信号时,解锁对所述旋转头部的旋转控制操作,并控制所述旋转头部执行与当前卫星定位数据对应的设定土壤类型匹配的旋转速度的旋转动作。
21.根据本发明的另一方面,还提供了一种基于卫星定位的旋转控制方法,所述方法包括使用如上述的基于卫星定位的旋转控制平台以根据挖坑主体的当前定位数据和下方地面的成像数据的颜色特征确认待挖掘的土壤类型和相应的挖掘策略。
附图说明
22.以下将结合附图对本发明的实施方案进行描述,其中:
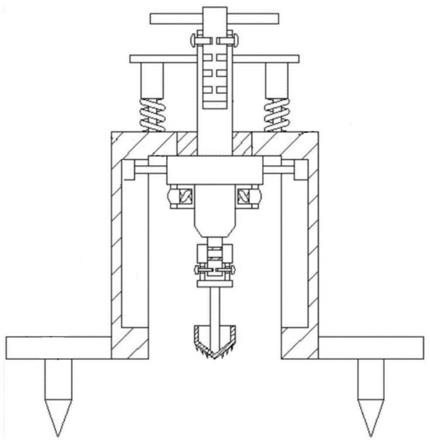
23.图1为根据本发明实施方案示出的基于卫星定位的旋转控制平台的针对性挖坑主体的结构示意图。
具体实施方式
24.下面将参照附图对本发明的基于卫星定位的旋转控制平台的实施方案进行详细说明。
25.土壤是指地球表面的一层疏松的物质,由各种颗粒状矿物质、有机物质、水分、空气、微生物等组成,能生长植物。土壤由岩石风化而成的矿物质、动植物、微生物残体腐解产生的有机质、土壤生物(固相物质)以及水分(液相物质)、空气(气相物质)、氧化的腐殖质等组成。
26.固体物质包括土壤矿物质、有机质和微生物通过光照抑菌灭菌后得到的养料等。液体物质主要指土壤水分。气体是存在于土壤孔隙中的空气。土壤中这三类物质构成了一个矛盾的统一体。它们互相联系,互相制约,为作物提供必需的生活条件,是土壤肥力的物质基础。
27.目前,在采用挖坑器械对其下方地面执行挖坑操作时,需要在确认是土壤时方执行相应的挖坑处理,如果是其他类型地面,例如水泥地面,一方面会导致与挖坑器械的挖坑部件强度和韧度的不匹配,容易损坏挖坑部件,另一方面会容易崩起碎块,对周围器械和人员造成伤害。
28.为了克服上述不足,本发明搭建了一种基于卫星定位的旋转控制平台,能够有效解决相应的技术问题。
29.根据本发明实施方案示出的基于卫星定位的旋转控制平台包括:
30.映射存储机构,用于存储不同卫星定位数据分别对应的设定土壤颜色和设定土壤类型,每一卫星定位数据对应的设定土壤颜色为所述卫星定位数据对应地球位置的土壤的各个颜色通道的各个数值范围。
31.接着,继续对本发明的基于卫星定位的旋转控制平台的具体结构进行进一步的说明。
32.在所述基于卫星定位的旋转控制平台中:
33.每一卫星定位数据对应的设定土壤颜色为所述卫星定位数据对应地球位置的土壤的各个颜色通道的各个数值范围包括:所述卫星定位数据对应地球位置的土壤的各个颜色通道的各个数值范围包括rgb颜色空间下的r通道数值范围、g通道数值范围和b通道数值范围。
34.所述基于卫星定位的旋转控制平台中还可以包括:
35.针对性挖坑主体,如图1所示,包括左侧固定架构、右侧固定架构、拼接板体、旋转头部、旋转控制电机、左侧支撑脚架和右侧支撑脚架,所述左侧固定架构和所述右侧固定架构分别设置在所述左侧支撑脚架和所述右侧支撑脚架上,所述拼接板体左侧固定在所述左侧固定架构的右端、右侧固定在所述右侧支撑脚架的左端,用于将所述左侧固定架构和所述右侧固定架构固定成一个整体,所述旋转头部穿过所述拼接板体的中央位置且朝向所述左侧支撑脚架和所述右侧支撑脚架之间的地面,所述旋转控制电机与所述旋转头部连接,用于控制所述旋转头部的旋转速度;
36.即时定位设备,设置在所述拼接板体内,用于获取所述针对性挖坑主体当前位置对应的当前卫星定位数据;
37.数据抓拍机构,封装在所述旋转头部的中央位置,用于在所述旋转控制电机启动
对所述旋转头部的旋转控制之前,实现对所述左侧支撑脚架和所述右侧支撑脚架之间的地面的现场抓拍操作,以获得对应的现场抓拍图像;
38.实时增强机构,与所述数据抓拍机构连接,用于对接收到的现场抓拍图像执行边缘增强处理和盒式滤波处理,以获得对应的实时增强图像;
39.通道提取机构,与所述实时增强机构连接,用于获取所述实时增强图像中每一个像素点在rgb颜色空间下的r通道数值、g通道数值和b通道数值,并对所述实时增强图像中各个像素点分别对应的各个r通道数值执行算术平均值计算以获得r通道均值,对所述实时增强图像中各个像素点分别对应的各个g通道数值执行算术平均值计算以获得g通道均值,以及对所述实时增强图像中各个像素点分别对应的各个b通道数值执行算术平均值计算以获得b通道均值;
40.类型提取设备,分别与所述即时定位设备和所述映射存储机构连接,用于在所述映射存储机构中查找与当前卫星定位数据对应的设定土壤类型,并查找与当前卫星定位数据对应的r通道数值范围、g通道数值范围和b通道数值范围以分别作为r通道参考数值范围、g通道参考数值范围和b通道参考数值范围;
41.信号解析设备,分别与所述类型提取设备和所述通道提取机构连接,用于在r通道均值在r通道参考数值范围内、g通道均值在g通道参考数值范围内以及b通道均值在b通道参考数值范围内时,发出第一控制信号,否则,发出第二控制信号;
42.其中,所述旋转控制电机还与所述信号解析设备连接,用于在接收到所述第一控制信号时,解锁对所述旋转头部的旋转控制操作,并控制所述旋转头部执行与当前卫星定位数据对应的设定土壤类型匹配的旋转速度的旋转动作。
43.在所述基于卫星定位的旋转控制平台中:
44.所述旋转控制电机还用于在接收到所述第二控制信号时,锁定对所述旋转头部的旋转控制操作以控制所述旋转头部进入暂停状态。
45.在所述基于卫星定位的旋转控制平台中:
46.所述实时增强机构包括图像输入设备、边缘处理设备、滤波处理设备和图像输出设备。
47.在所述基于卫星定位的旋转控制平台中:
48.在所述实时增强机构中,所述图像输入设备与所述数据抓拍机构连接,用于获取所述现场抓拍图像。
49.在所述基于卫星定位的旋转控制平台中:
50.在所述实时增强机构中,所述边缘处理设备与所述图像输入设备连接,用于对接收到的现场抓拍图像执行边缘增强处理,以获得中间处理图像。
51.在所述基于卫星定位的旋转控制平台中:
52.在所述实时增强机构中,所述滤波处理设备分别与所述图像输出设备和所述边缘处理设备连接,用于对接收到的中间处理图像执行盒式滤波处理,以获得对应的实时增强图像,并将所述实时增强图像发送给所述图像输出设备。
53.同时,为了克服上述不足,本发明还搭建了一种基于卫星定位的旋转控制方法,所述方法包括使用如上述的基于卫星定位的旋转控制平台以根据挖坑主体的当前定位数据和下方地面的成像数据的颜色特征确认待挖掘的土壤类型和相应的挖掘策略。
54.另外,在所述基于卫星定位的旋转控制平台中,所述映射存储机构还分别与所述信号解析设备、所述类型提取设备和所述通道提取机构连接,用于暂存所述信号解析设备、所述类型提取设备和所述通道提取机构的输出数据和输入数据。
55.以及在所述基于卫星定位的旋转控制平台中还包括计时机构,分别与所述信号解析设备、所述类型提取设备和所述通道提取机构连接,用于为所述信号解析设备、所述类型提取设备和所述通道提取机构提供不同的计时服务。
56.采用本发明的基于卫星定位的旋转控制平台,针对现有技术中现场挖坑机械的挖坑策略难以与实地土壤类型匹配的技术问题,能够在卫星定位数据与土壤类型和土壤颜色成像特征的匹配关系的基础上,完成基于视觉检测的土壤的确认以及土壤类型的确认,从而提升挖坑机械的安全性和可靠性。
57.如描述于此的,普通熟练的技术人员将认识到,在不背离本发明较宽范围的前提下,可以对本发明做出多种改变和修正。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1