一种GNSS级联自适应多波束形成方法与流程
一种gnss级联自适应多波束形成方法
技术领域
1.本发明属于卫星导航领域,具体涉及到一种gnss级联自适应多波束形成方法。
背景技术:
2.全球导航卫星系统(gnss,global navigation satellite system)是目前卫星导航领域的支柱,随着现代海战场卫星导航干扰技术发展,针对卫星导航接收机天线的强压制干扰功率越来越强。传统自适应调零天线只能抑制压制式干扰而不能提升信号功率。
3.现有技术中的传统自适应波束形成技术将抗干扰与波束形成耦合为一体,难以分割独立两部分,需要接收机为抗干扰天线提供波束形成先验信息,接收机与天线产生严重耦合。
4.中国发明专利20151601963.1公开了一种级联结构的导航接收机抗干扰的方法和装置,其结构包括有阵列天线和自适应滤波处理器,阵列天线和自适应滤波处理器构成的两级级联结构,通过采用多个自适应空域或空时滤波处理模块级联一个自适应空域滤波处理模块的抗干扰方法,避免参考填写的选取对系统的抗干扰性能造成影响。该专利方法能够做到对抗干扰从而保证导航接收机的定位效能,通过采用轮询处理和级联处理,逐个选择各个天线作为参考天线进行自适应滤波处理。但是该方法的轮询自适应滤波处理需要对阵列每路信号都进行自适应滤波,或者资源开销大或者实时性差,不利于工程实现,且卫星导航信号的解扩解调位于波束形成之前无法提高环路跟踪(解扩解调关键处理)灵敏度,不利于接收机实现空、时、频三维一体搜索跟踪,无法发挥三维跟踪的优势。
技术实现要素:
5.本发明的目的在于克服现有技术存在的不足,给出一种gnss级联自适应多波束形成方法。本发明的方法在天线端无需卫星方向与天线姿态信息辅助,在接收机端容易将波速形成与接收机捕获跟踪融为一体,端达到空、时、频三维一体搜索跟踪。且本发明给出的自相关平方根逆算法有利于改善强弱干扰下自相关矩阵奇异,提高系统干扰抑制度。
6.为了达到上述发明目的,本发明专利采用的技术方案如下:
7.一种gnss级联自适应多波束形成方法,其特征在于,该方法包括两级处理,第一级处理为阵列信号白化处理,生成无干扰阵列信号;第二级处理为无干扰阵列信号的波束加权处理;
8.所述阵列信号白化处理,生成无干扰阵列信号,其包括以下步骤:
9.第一步,生成自相关矩阵,对原始阵列信号x=[x0,...,xn,...,x
n-1
]
t
(n为阵列所包含的阵子个数)进行自相关运算得到其自相关矩阵r:
[0010]
r=e[xxh]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0011]
上式中符号e表示计算数学期望;
[0012]
第二步,自相关矩阵平方根分解,利用cholesky对自相关矩阵r进行平方根分解,使得r=llh,其中l为下三角矩阵,具有以下形式:
[0013][0014]
平方根分解后,得到的三角矩阵便于矩阵求逆计算,且计算稳定性提高,有利于大差别干扰功率下(自相关矩阵奇异),提高系统抗干扰能力。
[0015]
第三步,计算自相关平方根逆矩阵,使得ll-1
=i。
[0016]
第四步,数据变换处理,利用自相关平方根逆矩阵l-1
将原始阵列信号x转换为新阵列信号z,数学描述为:
[0017]
z=l-h
x
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0018]
所述无干扰阵列信号的波束加权包括以下步骤:
[0019]
第五步、权值变换处理,利用自相关平方根逆矩阵l-1
对原始波束权值矢量集合{a0,...,am,...,a
m-1
}进行转换,得到新波束权值矢量集合{b0,...,bm,...,b
m-1
},其中m为波束个数。每个新波束权值矢量计算方法如下:
[0020]bm
=l-ham
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0021]
第六步、波束合成,对新阵列信号z用新权值矢量集合{b0,...,bm,...,b
m-1
}进行加权得到波束信号集合{y0,...,ym,...,y
m-1
},每个波束信号计算方法如下:
[0022][0023]
在本发明一种gnss级联自适应多波束形成方法中,该方法所包含的白化处理与波束形成两级处理,其中白化处理是滤除阵列信号中的干扰信号,波束形成处理是增强卫星信号。
[0024]
在本发明一种gnss级联自适应多波束形成方法中,所述第一步中自相关矩阵求逆采用矩阵平方根分解方式减小矩阵奇异情况下计算精度,增强系统抗干扰能力。
[0025]
在本发明一种gnss级联自适应多波束形成方法中,抗干扰处理置于天线端,将波束形成置于接收机端,天线端无需天线姿态、卫星方向波束权值参数,减少天线与接收机之间的耦合。
[0026]
基于上述技术方案,本发明专利与现有技术相比具有如下技术优点:
[0027]
1.由于本发明gnss级联自适应多波束形成方法采用抗干扰处理(阵列信号白化)与波束加权级联架构,白化处理位于天线端,波束形成处理位于接收机端,可实现天线端无外界辅助情况下干扰抑制,接收机端易完成空(波束形成)、时、频三维一体化捕获跟踪。
[0028]
2.本发明gnss级联自适应多波束形成方法采用自相关平方根分解算法,可以对自相关平方根矩阵求逆而不用直接对自相关矩阵求逆,从而增强自相关矩阵奇异情况下的干扰抑制度,改善系统稳定性。
[0029]
3.本发明gnss级联自适应多波束形成方法因为波束加权处理位于信号解调解扩之前,可以提高解调解扩中环路跟踪灵敏度。
附图说明
[0030]
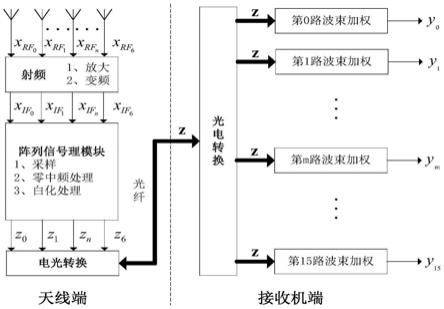
图1是本发明一种gnss级联自适应多波束形成方法的总体实现框图。
[0031]
图2是本发明一种gnss级联自适应多波束形成方法中白化处理流程示意图。
[0032]
图3是本发明一种gnss级联自适应多波束形成方法中波束加权原理示意图。
[0033]
图4是本发明一种gnss级联自适应多波束形成方法中平方根分解白化处理干扰抑制性能图。
[0034]
图5是本发明一种gnss级联自适应多波束形成方法中波束跟踪增益曲线。
具体实施方式
[0035]
下面结合附图和实施例来对本发明进行进一步的详细说明,以求更为清楚明了地理解本发明专利申请内容,但本发明的实施方式并不局限于此,不能以此来限制本发明专利的保护范围。
[0036]
如图1所示,本发明是一种gnss级联自适应多波束形成方法,目的是将抗干扰处理与波束加权分离,使得天线端抗干扰处理无需卫星方向与天线姿态等先验信息辅助,接收机端容易达到空、时、频三维一体搜索跟踪;同时采用自相关平方根矩阵求逆方式完成阵列信号白化处理,有助于提高自相关矩阵奇下干扰抑制度,改善系统抗干扰稳定性。
[0037]
本发明中整个方法级联为两部分:(1)阵列信号白化处理(抗干扰处理),(2)波束加权。其中抗干扰处理位于天线端,波束加权位于接收机端,二者通过光纤通信。天线端只管抗干扰处理,无需波束先验信息辅助,构成独立系统。波束加权位于接收机端,容易与接收机端捕获跟踪处理融为一体,实现三维联合捕获跟踪。
[0038]
以gps l1信号为例,阵列天线接收到的射频信号(n=0
…
6,7元阵)包括干扰、信号与噪声,频率1575.42mhz,带宽2.04mhz,其中信号功率范围在-135~120dbm,噪声功率在-107dbm,干扰功率比信号功率强70~100db。由于信号功率淹没于噪声之中,所以在捕获跟踪之前天线端无法提取卫星信号任何信息。如果要在天线端进行波束形成必须外界辅助以获取波束权值参数,这样天线端便不是一个独立自主系统,针对此问题,本设计只在天线端完成抗干扰处理,将需要外界辅助的波束加权处理置于接收机端。接收机端具有信号提取功能,容易获取卫星方向等波束参数,同时波束加权与捕获跟踪融为一体,可以增强捕获跟踪性能。
[0039]
首先天线接收的l1射频信号(n=0
…
6)经过射频模块,变换为15.42mhz中频信号(n=0
…
6)。然后,中频信号进入抗干扰处理模块进行数模转换、正交下变频及白化处理,变换为无干扰零中频信号zn(n=0
…
6),其中无干扰零中频信号载波频率为0mhz且为复信号。最后通过电光转换模块将7路数字信号转化为光信号发往接收机端。
[0040]
阵列信号处理中白化处理如图2所述,其由数据寄存、cholesy分解、下三角矩阵求逆、延迟匹配及白化处理六部分构成。
[0041]
正交下变频输出的零中频信号表示为:
[0042][0043]
其中n是阵子编号,m是卫星编号,s表示信号,j表示干扰,k为采样点编号,ts表示
采样周期,θm表示卫星俯仰角,表示卫星方位角,σ表示噪声标准差。
[0044]
在实现过程中,采用了如下步骤:
[0045]
第一步、对输入信号进行缓存,存储k拍中频数据,形成中频数据矢量集合,其表示为:
[0046]
{x0,...,xk,...,x
k-1
}
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0047]
第二步、根据中频矢量集合,计算自相关矩阵r,计算方法如下:
[0048][0049]
该部是数据期望计算的工程化方法。
[0050]
第三步、利用cholesy方法将自相关矩阵r对角化,得到:
[0051]
r=llhꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0052]
其中l为下三角矩阵,即r的平方根矩阵。
[0053]
第四步、对下三角矩阵l进行求逆操作,得到l-1
。
[0054]
第五步、利用l-1
白化原始阵列信号x,得到无干扰阵列信号z,计算方法如下:
[0055]
z=l-h
x
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0056]
至此得到无干扰零中频阵列信号z,通过电光转换变为光信号发往接收机端。
[0057]
接收机端通过光电转换器恢复出无干扰零中频阵列信号z,根据捕获跟踪的具体需求完成波束加权处理,如图3,所示波束加权操作为:
[0058][0059]
卫星信号方向可以通过卫星星历计算得到,或者通过三维跟踪得到卫星角度信息。一般情况下,其表达式为:
[0060][0061]
其中,[xn,yn,zn]为天线阵元坐标数据,θm与分别表示卫星俯仰与方位角。
[0062]
图4是gnss级联自适应多波束形成方法给本方案自适应波束形成性能。图中针对7元中心圆阵,阵元为全向增益,信号位于45
°
,强干扰位于10
°
,弱干扰位于85
°
,强干扰比弱干扰强60db。同种干扰情况下分别采用自相关矩阵求逆算法与自相关平方根求逆算法对系统进行仿真。图中虚线为自相关矩阵求逆法,实线为自相关平方根求逆法。由于强弱干扰功率差别大,造成自相关矩阵奇异,如果直接用自相关矩阵的逆对阵列信号进行白化处理会造成弱干扰抑制度降低且抑制角度偏离(图中虚线所示),利用自相关平方根逆矩阵进行白化可以显著改善弱干扰抑制性能(图中实线所示)。图5为波束增益跟踪曲线,因为跟踪阶起始段没有对准卫星,所以增益为0db,当空时频三维跟踪锁定后,波束对准卫星,增益提高到理论值。
[0063]
毫无疑问,本发明一种gnss级联自适应多波束形成方法除了上述实施例以外还包括其他可以实现的方式,并不能局限于上述限制。总而言之,本发明的保护范围还包括其他对于本领域技术人员来说显而易见的变换和替代。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1