一种基于原子钟的沉浮式海底地震仪及原子钟驯服方法
1.本发明涉及属于海底地震仪技术领域,具体涉及一种基于原子钟的沉浮式海底地震仪及原子钟驯服方法。
背景技术:
2.海底地震仪是进行海底地球物理探测的重要仪器,而在远海勘探中,沉浮式海底地震仪是现在海洋地震勘探的主要手段,其依靠自身的脱钩释放机构实现仪器的布放和回收,由于其留海时间长,且其在海底工作期间没有有效可信的时钟源来实现自身数据的钟差校正,其自身的仪器时钟精度就显的至关重要,现在的海底地震仪其内部晶振均采用恒温晶振或者温补晶振,其精度都在0.5ppm以内,因此其在长时间的留海过程中,其自身的采集数据钟差会累计到比较大的量级。
技术实现要素:
3.本发明的目的在于提供一种基于原子钟的沉浮式海底地震仪,设计一种基于原子钟的沉浮式海底地震仪可以极大的减少在长时间的留海采集过程中出现的钟差累计效应。由于原子钟的时间精度高,其时间精度可控制在1*10
‑5ppm—1*10
‑6ppm以上,因此通过增加原子钟可以实现沉浮式海底地震仪在采集钟差漂移上提高1000倍以上。
4.具体的,基于原子钟的沉浮式海底地震仪,包括耐压舱、地震传感器,所述地震仪还包括原子钟电路板,所述原子钟电路板用于为地震仪在海底工作期间提供有效可信的时钟源来实现自身数据的钟差校正。
5.进一步的,所述原子钟电路板硬件包括mcu,以及分别与mcu连接的原子钟、ad模数转换模块、姿态模块、电源管理模块、交互模块、存储模块、数传模块、授时模块。
6.进一步的,mcu用于综合处理整个系统的任务需求,对整个仪器进行控制;
7.原子钟用于输出固定频率的振荡信号,并接收特定的指令完成自身振荡的校准;
8.ad模数转换模块用于对模拟信号进行采集并进行数字化转换,转换后的数字信号通过接口提供给mcu;姿态模块内置加速度传感器,用于提供姿态信息给mcu;
9.电源管理模块用于对输入电压进行稳压,对电流进行整流处理,给mcu和外围设备提供所需要的稳定的电源供给;
10.交互模块内置wifi或者蓝牙等无线模块,用于对mcu提供串口或者spi等数据接口,对用户提供wifi无线热点或者蓝牙热点等交互端口,完成信息的交互;
11.存储模块由存储介质构成,用于保持采集的数据;
12.数传模块包括无线数据传输模块。
13.进一步的,所述地震仪还包括舱球护壳、释放器、换能器、水听计总成、水声应答板、电池。
14.进一步的,换能器用于接收水声信号,将接收到的水声信号转换为电信号输入给下方的水声应答板;
15.水听计总成包含水听计,用于在采集过程中记录其中的水声信号,水声信号和其他三通道地震信号共同组成完整的数据记录;
16.水声应答板用于接收换能器信号,将接收到的水声信号解析,解析后执行复位、释放;
17.原子钟电路板内部集成采集单元,微处理器,原子钟,存储单元,电源管理单元及配套的电子器件;
18.电池用于给仪器提供电力,包括可充电锂电池或者一次性电池。
19.另一方面,本发明还提供了一种基于上述海底地震仪实现的原子钟驯服方法,应用于内部原子钟的驯服,实现原子钟内部时间系统的校准。
20.所述方法包括以下步骤:
21.步骤1:mcu通过接收原子钟提供的高频振荡信号作为时钟源启动;
22.步骤2:mcu对控制选择单元进行控制,使外部pps直接和mcu相连;
23.步骤3:mcu对外部提供的pps进行筛选算法判定外部时钟源类型;
24.步骤4:mcu对控制选择单元进行控制,使外部pps直接和原子钟相连;
25.步骤5:mcu设置驯服参数给原子钟,并发送原子钟开始驯服指令,如若此时原子钟已开始驯服,则需要重新设置驯服参数,继续驯服流程,并步需要重新开启驯服;
26.步骤6:在驯服过程中,mcu获取原子钟的驯服状态,并通过判定其返回的信息确认驯服是否完成,如若是,则进入到步骤7。
27.步骤7:mcu发送驯服结束指令,原子钟驯服完成,mcu对控制选择单元进行控制,使外部pps直接和mcu相连。
28.进一步的,所述方法中步骤3具体包括:
29.步骤31:将自身内部timer进位值设置为自身标称值;
30.步骤32:记录每次外部pps来临时刻自身内部timer的tc值;
31.步骤33:计算两次记录值之间的差值,并统计其所有记录中的最大值;
32.步骤34:统计50次的样本库中的最大值delmax,如若delmax大于0.1us,则判定为外部pps输入源为gps,设置驯服参数atomd为5000,否则判定外部pps输入源为铷钟,设置atomd为50。
33.本发明的有益效果在于:本发明设计一种基于原子钟的沉浮式海底地震仪及原子钟驯服方法,相比于现有技术有以下效果:
34.基于原子钟的沉浮式海底地震仪:
35.比原有使用普通晶振的沉浮式海底地震仪时钟精度提高1000倍。自动完成驯服流程,无需人工干预。
36.原子钟驯服算法:
37.算法可接收gps和高精度铷钟两种常用时钟源对原子钟完成驯服。算法可对时钟源进行自动识别,无需手动操作。自动设置驯服参数,节省时间。自动识别驯服结果,整个过程自动判定,自动化程度高。
附图说明
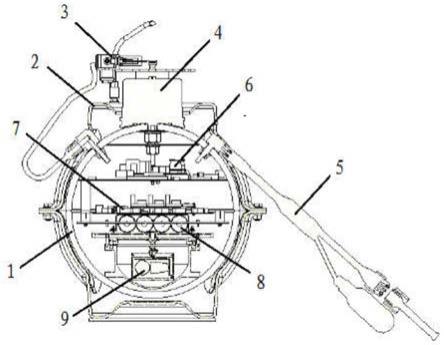
38.图1是本发明海底地震仪的结构示意图。
39.图2是原子钟电路板硬件结构示意图。
40.图3是原子钟驯服原理示意图。
具体实施方式
41.下面结合附图对本发明的具体实施方式进行说明:
42.实施例1
43.仪器结构如图1所示,基于原子钟的沉浮式海底地震仪,包括:耐压舱1,舱球护壳2,释放器3,换能器4,水听计总成5,水声应答板6,原子钟电路板7,电池8,地震传感器9。
44.耐压舱1
45.耐压舱1主要完成内部器件的保护,承受深海海底的水压。耐压舱的材质为玻璃或者特殊的耐压金属。
46.舱球护壳2
47.用于保护内部耐压舱免受运输及使用过程中的损坏,其材质为塑料。
48.释放器3
49.释放器3为沉浮式海底地震仪的释放装置,用于其和下方沉耦架的脱钩,使仪器释放。
50.换能器4
51.换能器4主要接收水声信号,将接收到的水声信号转换为电信号输入给下方的水声应答板
52.水听计总成5
53.主要包含水听计,用于在采集过程中记录其中的水声信号,水声信号和其他三通道地震信号共同组成完整的数据记录。
54.水声应答板6
55.用于接收换能器信号,将接收到的水声信号解析,解析后执行复位,释放等操作。
56.原子钟电路板7
57.带原子钟的电路板,内部集成采集单元,微处理器,原子钟,存储单元,电源管理单元以及配套的电子器件,完成仪器的所有功能调度。
58.电池8
59.给仪器提供电力,可用可充电锂电池或者一次性电池组成。
60.地震传感器9
61.将地震信号转换为电信号,上部于原子钟电路板相连,给电路板提供三通道的地震信号。
62.工作原理:
63.1.仪器由电池供电,电池通过导线与原子钟电路板相连,原子钟电路板上集成电源管理模块,该模块可接收电池提供的电能,提供整流和稳压,并对电池充电进行管理。
64.2.水声应答板与换能器组成独立的单元,提供水声应答和回收功能,其由单独电源供电,保证独立稳定性,换能器首先将水声信号转换为电信号,电信号传输给水声应答板,水声应答板对信号进行采集,采集后监测其电信号,当收到不同的编码信号后,分别对不同的编码信号进行回应,当解析到仪器重启信号后,则给对应的原子钟电路板发送信号,
引起仪器重启,当解析到释放信号时,则给释放器提供熔断电压,引起释放器熔断,释放器熔断后,仪器与其配套的沉耦架脱离,仪器上浮回收。
65.3.仪器上电后,由原子钟电路板控制,首先进入交互模式,在此模式下,仪器工作在较高主频下,打开相应的交互信道,交互信道配置为wifi,仪器映射为wifi热点模式,此时用户可以通过wifi与仪器进行交互,获取仪器的各种状态,同时,原子钟电路板将仪器内部的存储设备映射为usb的msc设备,用户可以通过usb对仪器内部数据进行操作。
66.4.仪器在交互模式下可通过接收用户对交互指令进入到休眠模式,在休眠模式,原子钟电路板关闭所有外设,时钟降到最低,同时主控芯片进入到低功耗模式,最大限度的降低整个仪器的功耗,保存电池的电能。
67.5.仪器在交互模式下,用户可通过交互指令使仪器进入到采集模式,在采集模式下,仪器关闭交互通道,首先打开gps模块进行对钟,对钟后仪器获得绝对精准的时间,仪器授时后关闭gps模块,后仪器打开ad采集器,采集器分别采集由下方地震检波器的三分量的地震信号以及水听计的水声信号,后将此模拟信号转换为数字信号,并将此数字信号存储到内部存储设备中。
68.6.仪器在交互模式中,如若收到由外部发送到释放信号时,仪器释放回收,此时仪器进入到释放模式,在此模式下仪器重新打开gps,接收时间信息,进行对钟操作,计算仪器此时自身的钟差,将钟差存储到存储设备中,对钟阶段完成。
69.原子钟电路板硬件结构如图2所示:
70.原子钟电路板硬件由mcu,原子钟,ad模数转换模块,姿态模块,电源管理模块,交互模块,存储模块,数传模块和授时模块构成。其分别的功能作用描述如下:
71.mcu:综合处理整个系统的任务需求,对整个仪器进行控制。
72.原子钟:由铯原子为基础制作完成时钟源,其可输出固定频率的振荡信号,并接收特定的指令完成自身振荡的校准。
73.ad模数转换模块:对模拟信号进行采集并进行数字化转换,转换后的数字信号通过接口提供给mcu.
74.姿态模块:内置加速度传感器,可提供姿态信息给mcu。
75.电源管理模块:对输入电压进行稳压,对电流进行整流处理,给mcu和外围设备提供所需要的稳定的电源供给。
76.交互模块:内置wifi或者蓝牙等无线模块,对mcu提供串口或者spi等数据接口,对用户提供wifi无线热点或者蓝牙热点等交互端口,完成信息的交互。
77.存储模块:由存储介质构成,存储介质可选用选用sd卡或者flash等非易失性存储介质,用于保持采集的数据。
78.数传模块:由无线数据传输模块构成,
79.工作原理:
80.1:原子钟电路板的电源管理模块对外部供电进行稳压和电流的整流,生成mcu以及各个模块所需要的电压,对各模块提供电源支持。
81.2:原子钟电路板的mcu启动时首先与原子钟模块相连,依靠原子钟内置的晶体振荡单元完成自身锁相环的锁定,后启动微处理器。
82.3:原子钟电路板的mcu启动后运用如下的内部原子钟的驯服算法,对原子钟模块
进行驯服,使原子钟实现精准的振荡,后mcu采用驯服后的原子钟作为时钟源作为自身晶振源。
83.4:原子钟电路板的mcu打开授时模块,从授时模块得到限制的精确的时间信息,将次时间信息更新到自身仪器的时间中。
84.5:原子钟电路板的mcu对自身的存储模块,交互模块,姿态模块进行自检,确认此三种模块的工作正常。
85.6:原子钟电路板的mcu控制数传模块,使其在仪器工作的释放阶段打开,并将对应的位置信息通过接口传输给数传模块,数传模块后通过无线的频段发送到位置接收设备。
86.7:原子钟电路板的mcu在仪器的采集阶段,将数据通过接口发送到存储模块,存储模块对数据进行记录和存储,保证数据的非易失性。
87.8:原子钟电路板的mcu通过交互模块在仪器的交互阶段接收外交的交互指令,后根据交互指令的需求获取仪器的状态,后将仪器的状态通过接口传输给交互模块,交互模块通过无线通道与电脑的交互软件通信,实现仪器与用户的交互功能。
88.9:原子钟电路板的姿态模块在仪器的交互模式下和采集模式下提供仪器当前的姿态信息,姿态信息可供仪器电机调平以及日志记录等应用需要。
89.10:原子钟电路板的ad模数转换模块在仪器的采集模式下通过与外置检波器相连,采集外置检波器的模拟信号,对模拟信号进行模拟信号的数字化转换,转换后的数字信号通过数字接口与mcu相连,mcu将数字信号做出对应的后续处理。
90.实施例2
91.内部原子钟的驯服算法如图3所示:
92.mcu:微处理器
93.pps:秒脉冲信号
94.tc:微处理器内部计时器计数值
95.atomd:原子钟驯服参数,决定驯服时间,值越小驯服时间越短,如若时钟源精度较高可设置其值较小,否则需要设置较高。
96.控制选择单元与mcu之间设有指向控制选择单元的a通道:mcu对pps选择控制信号;
97.控制选择单元与mcu之间设有指向mcu的b通道:外部驯服pps输入到mcu;
98.控制选择单元与原子钟之间设有指向原子钟的c通道:外部驯服pps输入到原子钟;
99.mcu与原子钟之间设有双向的d通道:mcu和原子钟之间的双向通信;
100.mcu与原子钟之间设有指向mcu的e通道:原子钟给mcu的高频振荡信号;
101.驯服算法如下:
102.1:mcu通过接收e通道的原子钟提供的高频振荡信号作为时钟源启动。
103.2:mcu对控制选择单元进行控制,使外部pps直接和mcu相连。
104.3:mcu对外部提供的pps进行筛选算法判定外部时钟源类型,其筛选算法表述如下:
105.1)将自身内部timer进位值设置为自身标称值。
106.2)记录每次外部pps来临时刻自身内部timer的tc值。
107.3)计算两次记录值之间的差值del,并统计其所有记录中的最大值delmax。
108.4)统计50次的样本库中的最大值delmax,如若delmax大于0.1us,则判定为外部pps输入源为gps,设置驯服参数atomd为5000,否则判定外部pps输入源为铷钟,设置atomd为50
109.4:mcu对控制选择单元进行控制,使外部pps直接和原子钟相连。
110.5:mcu通过通道d(串口)设置驯服参数atomd给原子钟,并发送原子钟开始驯服指令,如若此时原子钟已开始驯服,则需要重新设置参数atomd,继续驯服流程,并步需要重新开启驯服。
111.6:在驯服过程中,mcu通过通道d获取原子钟的驯服状态,并通过判定其返回的信息确认驯服是否完成,如若是,则进入到第7步。
112.7:mcu通过通道d发送驯服结束指令,原子钟驯服完成,mcu对控制选择单元进行控制,使外部pps直接和mcu相连。
113.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1