一种基于多传感器数据的高精度点云地图生成方法与流程
1.本发明涉及自动驾驶技术领域,具体涉及一种基于多传感器数据的高精度点云地图生成方法。
背景技术:
2.自动驾驶技术的研究在近年来得到了广泛关注,包括国内外汽车制造商,it企业,高校和科研机构等都在此领域进行投入和积极探索。自动驾驶技术被看作是解决交通效率和安全问题的可行方案。
3.在目前的自动驾驶的经典技术框架中,高精度定位是基础但是最重要的因素,是决定自动驾驶感知准确性,决策规划可靠性以及控制执行精确性的最基础保障。自动驾驶中按照不同的定位实现技术,高精度定位可以分为三类:1基于信号的定位,典型代表就是gnss定位,即全球卫星导航系统;2航迹推算
ꢀ‑
imu惯性测量单元,其根据上一时刻的位置和方位推断现在的位置和方位;3环境特征匹配,基于激光雷达/立体视觉的定位,用观测到的特征和数据库中存储的特征进行匹配,得到当前时刻车辆的位置和姿态。高精度点云地图作为静态先验,可根据激光雷达点云数据实时获取自动驾驶车辆的位置。
4.现有高精度点云地图的采集和制作可大致分为两类,即基于激光雷达点云和基于图像的方法。基于视觉图像的高精度地图制作方案成本低廉,操作方便,但在目前的技术前提下,对图片质量以及采集环境等都有较高要求。而基于激光雷达点云的制作方案,则受工况等影响较小,可在多种条件下进行数据采集,且后期处理方便,可方便快速地生成高精度点云地图。
5.公开号为cn106441319a的中国专利,提供了无人驾驶车辆车道级导航地图的生成系统和方法。该系统有离线全局地图和在线局部地图两部分组成,离线模块在无人驾驶车辆形式区域,利用卫星照片,车载传感器,高精度组合定位获取原始数据,然后经过数据处理,提取道路信息,最后对道路信息提取结果进行融合生成全局地图。在线模块在无人驾驶车行驶中,根据实时定位信息,提取出离线全局地图中的道路数据,绘制出以车辆为中心,固定距离范围内的在线局部地图。
6.公开号为cn104573733a的中国专利,提供了一种基于高清正射影图的高精地图生成系统和方法。该系统中利用车载图像采集系统对道路数据进行采集,并利用算法处理得到全局地图。基于此地图,进行道路标志的标注。
7.这些方法在较大范围内运行时,受地理特征变化的影响,导致累计误差增大,且未考虑高精度点云地图生成中回环检测问题,保证地图的闭环,完整以及一致性。
技术实现要素:
8.本发明的目的在于提供一种基于多传感器数据的高精度点云地图生成方法,解决以往自动驾驶车辆的定位系统容易受地理特征变化的影响,导致累积误差增大,从而影响驾驶精度的问题。
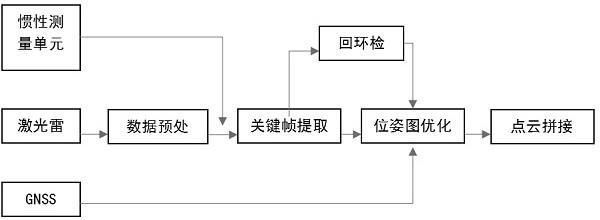
9.为解决上述的技术问题,本发明采用以下技术方案:一种基于多传感器数据的高精度点云地图生成方法,包括步骤:s1,数据采集车辆在自动驾驶车辆待行驶区域进行行驶,利用数据采集车辆上安装的车载传感器、gnss全球定位系统和惯性导航系统采集待行驶区域内的原始地理数据;s2,对车载传感器、gnss全球定位系统和惯性导航系统采集到的数据进行离线处理,进行数据帧时间对齐,并且通过激光雷达点云数据处理;s3,利用点云匹配算法提取激光雷达数据的关键帧,并利用自适应参数计算相邻关键帧的变换关系;s4,对关键帧进行多轮扫描,利用不同的参数加入鲁棒的回环约束条件;s5,对关键帧加入gnss定位坐标约束;s6,利用提取到的关键帧构建位姿图,并进行优化,得到全局最优位姿;s7,点云拼接和存储,生成高精度点云地图。
10.进一步的技术方案是,车载传感器通过保护罩安装于数据采集车辆的车顶,保护罩内设置有安装腔,车载传感器安装于安装腔内。
11.更进一步的技术方案是,保护罩包括可拆卸相连的壳体和底座。
12.更进一步的技术方案是,底座的侧面设置有呈“l”字形相连的竖槽和横槽,竖槽的上端和底座的上侧相连通,下端和横槽相连通,壳体的内侧连接有锁紧杆,锁紧杆从竖槽的上端穿进竖槽内,并且在竖槽的下端水平移动至横槽内,以使壳体和底座卡扣相连。
13.更进一步的技术方案是,横槽的上槽壁和下槽壁均设置有弹性颗粒,弹性颗粒设置为多个,且沿横槽的长度方向均匀排列。
14.更进一步的技术方案是,底座上设置有上下通透的排气孔和进气孔,底座的上侧在排气孔的上方设置有排气扇,在进气孔的上方设置有进气扇。
15.更进一步的技术方案是,进气孔内转动设置有多个格栅,格栅通过转动轴和进气孔的孔壁转动相连。
16.更进一步的技术方案是,进气孔的孔壁上设置有收纳槽,收纳槽内安装有电机,电机的输出轴上连接有转动轮,转动轮上传动套设有拉绳,拉绳的上端在转动轴的上侧依次和多个格栅相连,拉绳的下端在转动轴的下侧依次和多个格栅相连。
17.更进一步的技术方案是,壳体的顶部设置有雨滴传感器,雨滴传感器通过控制模块与电机和进气扇相连。
18.与现有技术相比,本发明的有益效果是:通过在采集车辆上设置车载传感器、gnss全球定位系统和惯性导航系统,能够通过多种方式来采集待行驶区域内的原始地理数据,提高了原始地理数据的多样性,避免单一的地理数据容易出现误差。通过进行数据帧时间对齐,进一步提升了原始地理数据的精准度,通过激光雷达点云数据的自适应匹配以及鲁棒的回环检测,提高了后续数据处理的精准度和稳定性。通过步骤s1
‑
s7生成的高精度点云地图解决以往自动驾驶车辆的定位系统容易受地理特征变化的影响,导致累积误差增大,从而影响驾驶精度的问题。
附图说明
19.图1为本发明一种基于多传感器数据的高精度点云地图生成方法的步骤示意图。
20.图2为本发明一种基于多传感器数据的高精度点云地图生成方法的壳体和底座连接示意图。
21.图3为本发明一种基于多传感器数据的高精度点云地图生成方法的锁紧杆和横槽
连接示意图。
22.图4为本发明一种基于多传感器数据的高精度点云地图生成方法的进气孔204剖面示意图。
23.发明图标:1
‑
壳体,101
‑
锁紧杆,2
‑
底座,201
‑
竖槽,202
‑
横槽,203
‑
排气孔,204
‑
进气孔,205
‑
排气扇,206
‑
进气扇,207
‑
格栅,208
‑
转动轴,209
‑
收纳槽,210
‑
电机,211
‑
转动轮,212
‑
拉绳,3
‑
工作腔。
具体实施方式
24.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
25.实施例:一种基于多传感器数据的高精度点云地图生成方法,包括步骤:s1,数据采集车辆在自动驾驶车辆待行驶区域进行行驶,利用数据采集车辆上安装的车载传感器、gnss全球定位系统和惯性导航系统采集待行驶区域内的原始地理数据;s2,对车载传感器、gnss全球定位系统和惯性导航系统采集到的数据进行离线处理,进行数据帧时间对齐,并且通过激光雷达点云数据处理;s3,利用点云匹配算法提取激光雷达数据的关键帧,并利用自适应参数计算相邻关键帧的变换关系;s4,对关键帧进行多轮扫描,利用不同的参数加入鲁棒的回环约束条件;s5,对关键帧加入gnss定位坐标约束;s6,利用提取到的关键帧构建位姿图,并进行优化,得到全局最优位姿;s7,点云拼接和存储,生成高精度点云地图。通过在采集车辆上设置车载传感器、gnss全球定位系统和惯性导航系统,能够通过多种方式来采集待行驶区域内的原始地理数据,提高了原始地理数据的多样性,避免单一的地理数据容易出现误差。通过进行数据帧时间对齐,进一步提升了原始地理数据的精准度,通过激光雷达点云数据的自适应匹配以及鲁棒的回环检测,提高了后续数据处理的精准度和稳定性。通过步骤s1
‑
s7生成的高精度点云地图解决以往自动驾驶车辆的定位系统容易受地理特征变化的影响,导致累积误差增大,从而影响驾驶精度的问题。
26.车载传感器通过保护罩安装于数据采集车辆的车顶,保护罩内设置有安装腔3,车载传感器安装于安装腔3内。通过将车载传感器设置于车顶,便于车载传感器采集原始地理数据,通过设置保护罩,能够有效的对车载传感器进行保护,避免雨水淋湿车载传感器导致车载传感器故障。
27.保护罩包括可拆卸相连的壳体1和底座2。这样的设置,便于通过拆卸壳体1和底座2来维修或者调整车载传感器。提升了操作和维修的便捷度。
28.底座2的侧面设置有呈“l”字形相连的竖槽201和横槽202,竖槽201的上端和底座2的上侧相连通,下端和横槽202相连通,壳体1的内侧连接有锁紧杆101,锁紧杆101从竖槽201的上端穿进竖槽201内,并且在竖槽201的下端水平移动至横槽202内,以使壳体1和底座2卡扣相连。这样的设置,当需要连接壳体1和底座2的挥挥手,通过将壳体1的锁紧杆101对齐竖槽201的上端,然后使锁紧杆101从竖槽201的上端滑动到竖槽201的下端,然后通过旋转壳体1,让锁紧杆101从竖槽201内滑动到横槽202内,这样就能使壳体1和底座2卡扣相连。壳体1上的锁紧杆101以及底座2上配套的竖槽201和横槽202均可以设置为多个,这样能够
使壳体1和底座2连接更加稳定和牢固。在分离壳体1和底座2的时候只需要反向旋转壳体1,使锁紧杆101从横槽202移动到竖槽201内,然后从竖槽201的上端滑出即可。
29.横槽202的上槽壁和下槽壁均设置有弹性颗粒,弹性颗粒设置为多个,且沿横槽202的长度方向均匀排列。通过设置弹性颗粒,能够增加锁紧杆101和横槽202之间连接稳定性,通过多个均匀排列的弹性颗粒,能够是锁紧杆101稳定的卡设于横槽202内,这样在数据采集车辆行驶的过程中,壳体1和底座2不会脱落,提升了结构的稳定性。底座2上设置有上下通透的排气孔203和进气孔204,底座2的上侧在排气孔203的上方设置有排气扇205,在进气孔204的上方设置有进气扇206。通过设置排气孔203、进气孔204、排气扇205和进气扇206,能够在天气炎热气温过高的时候,通过排气孔203、进气孔204、排气扇205和进气扇206能够将安装腔3内的高温空气排出,然后换入温度较低的显现空气,这样能够使安装腔3内保持比较合适的温度,避免天气炎热以及车载传感器自身工作发热导致安装腔3内温度过高,影响车载传感器的精度。
30.所述进气孔(204)内转动设置有多个格栅(207),所述格栅(207)通过转动轴(208)和进气孔(204)的孔壁转动相连。在进气孔204通过转动轴208转动连接多个格栅207,这样在不需要使用进气扇206或者下雨的时候,通过将所有的格栅207围绕转动轴208转动至水平状态或者接近水平状态来封堵住进气孔204,避免雨水或者杂物从进气孔204进入到安装腔3内。
31.进气孔204的孔壁上设置有收纳槽209,收纳槽209内安装有电机210,电机210的输出轴上连接有转动轮211,转动轮211上传动套设有拉绳212,拉绳212的上端在转动轴208的上侧依次和多个格栅207相连,拉绳212的下端在转动轴208的下侧依次和多个格栅207相连。这样的设置,当需要封闭进气孔204的时候,通过控制电机210工作,使电机210带动转动轮211转动,转动轮211通过转动能够带动拉绳212移动,当转动轮211顺时针转动的时候,转动轮211上侧的拉绳212(即拉绳212的上端)朝向转动轮移动,这样就能带动所有格栅207的上端均朝向转动轮211一侧倾斜,同时转动轮下侧的拉绳212(即拉绳212的下端)通过倾斜的格栅207远离转动轮211。直到拉绳212将格栅207带动围绕转动轴208转动至水平状态或者接近水平状态以封堵住进气孔204时,电机210停止工作。同时进气扇206也停止工作。当需要使用进气扇206的时候,只需要使电机210带动转动轮211反向转动,使所有格栅207呈竖直状态即可。
32.壳体1的顶部设置有雨滴传感器,雨滴传感器通过控制模块与电机210和进气扇206相连。通过设置雨滴传感器和控制模块,能够实现下雨时通过控制模块来自动控制电机210和进气扇206的工作,这样能够根据天气情况自动控制是否开启和封闭进气孔204。排气孔203和排气扇205的设置可以与进气孔204和进气扇206的设置方式相同。
33.尽管这里参照本发明的多个解释性实施例对本发明进行了描述,但是,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。更具体地说,在本技术公开、附图和权利要求的范围内,可以对主题组合布局的组成部件和/或布局进行多种变型和改进。除了对组成部件和/或布局进行的变形和改进外,对于本领域技术人员来说,其他的用途也将是明显的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1