一种单点围岩变形测量装置及方法与流程
1.本发明属于矿山开采技术领域,具体地说涉及一种单点围岩变形测量装置及方法。
背景技术:
2.随着国家对矿井限员政策的实施,井下作业人员在满足正常作业的基础上越少越好,但存在大量一个人难以完成的作业,并且目前的巷道与老旧巷道相比,断面较大,巷道高度在3米以上,宽度在5米以上,即使两三人互相配合。也需要大量的时间,如“十字测点法”围岩观测,传统的观测方法是预先在巷道布点,选取顶板和帮两侧锚杆固定挂钩,通过铅垂线和两帮拉线交点,形成abcdf五点,使用钢卷尺分别测量bd、bc、ad、af的长度,进而计算巷道左、右帮鼓帮、顶板下沉、底板鼓起的大小。具体的,如图1所示,传统的十字测点法,分别在a0、b0、c0布点,在a0点的锚杆上固定一个刚性挂钩,并在a0点悬挂铅垂线绳,在b0点的锚杆上固定一个刚性挂钩,在c0点固定线绳,并将线绳另一端临时固定在b0点的挂钩上。此时,两线交叉点作为d0点,铅垂线下垂到底板作为f0点。由于a0点和b0点已经固定刚性挂钩,可将钢卷尺的一端固定在刚性挂钩上,读另一端在其他点的读数。当巷道发生变形后,由于a点f点主要上下移动,b点c点主要作左右移动,因此d点位置几乎不变,这样,顶板下沉量为a0d0‑
a1d1,底鼓量为d0f0‑
d1f1,左帮移近量为b0d0‑
b1d1,右帮移近量为d0c0‑
d1c1。但在巷高普遍在3米以上的巷道中作业时,因涉及登高作业,所以此方法比较麻烦,在操作过程中既危险,又需要耗费大量的时间,并且在巷道开挖初期围岩变形量较大,往往需要每天观测,围岩稳定后,仍需要定期观测,工程量较大,耗费的人力较多。
3.因此,现有技术还有待于进一步发展和改进。
技术实现要素:
4.针对现有技术的种种不足,为了解决上述问题,现提出一种单点围岩变形测量装置及方法,其通过固定装置固定于巷道内帮部的一锚杆头或帮部上,通过设置调向机构调整设备机身的旋转方向并通过陀螺仪测定设备机身的旋转角度,通过激光测距仪测距,打破了传统的拉线测量方式,只需一人即可实现巷道变形量的测量,消除了登高作业的危险,减小了工人劳动强度,有效提高了工作效率。
5.为实现上述目的,本发明提供如下技术方案:
6.一种单点围岩变形测量装置,其包括依次相互转动连接的固定装置、连接部及设备机身,连接部内设置有用于实现设备机身相对于固定装置上下左右旋转的调向机构,设备机身内分别设置有中央处理器、电池组、分别与中央处理器及电池组连接的驱动器、存储器、用于测量设备机身与水平面之间夹角的陀螺仪及激光测距仪,驱动器与调向机构驱动连接,中央处理器上外接有显示设备,激光测距仪设置于设备机身远离连接部一端且激光测距仪发射的激光轴线与设备机身轴线重合。
7.进一步地,所述调向机构包括竖直设置于连接部内的第一齿轮轴、水平设置于连
接部内的第二齿轮轴、设置于连接部内且与第一齿轮轴啮合的第一齿轮组、设置于连接部内且与第一齿轮组驱动连接的第一电动马达、设置于连接部内且与第二齿轮组驱动连接的第二电动马达,第一电动马达与第二电动马达分别与驱动器连接,第一齿轮轴与固定装置之间通过第一固定件固定连接,第二齿轮轴与设备机身之间通过第二固定件固定连接。
8.进一步地,所述第一固定件由两根第一连接杆组成,两根第一连接杆的一端分别垂直连接于第一齿轮轴的两端,另一端分别连接于固定装置上。
9.进一步地,所述第二固定件由两根第二连接杆组成,两根第二连接杆的一端分别垂直连接于第二齿轮轴的两端,另一端分别连接于设备机身上。
10.进一步地,所述第一齿轮组包括连接于第一电动马达输出轴上的第一主动齿轮、分别与第一主动齿轮及第一齿轮轴啮合的第一从动齿轮,第二齿轮组包括连接于第二电动马达输出轴上的第二主动齿轮、分别与第二主动齿轮及第二齿轮轴啮合的第二从动齿轮。
11.进一步地,所述固定装置固定于帮部的一锚杆头上,固定装置包括套设于锚杆头上的固定套、设置于固定套上且将固定套夹紧固定于锚杆头上的固定夹,固定夹设置至少一个。
12.进一步地,所述固定套的底部为圆球形。
13.进一步地,所述设备机身内还设置有与中央处理器连接的射频收发器,对应射频收发器连接有无线遥控器。
14.进一步地,所述显示设备设置于无线遥控器或设备机身上。
15.一种单点围岩变形测量方法,其包括以下步骤:
16.s1、将固定装置固定于帮部一锚杆头上,通过陀螺仪测量设备机身与水平面之间的夹角并通过调向机构将设备机身调整至水平,选取巷道顶板上的任意一点为a点,设备机身远离连接部一端端点设为b点,设备机身正对巷道帮部上的点设为c点,启动激光测距仪测定设备机身与设备机身正对巷道帮部之间的水平距离bc并记录;
17.s2、启动激光测距仪,通过调向机构调整设备机身使之激光测距仪发射的激光指向a点并测定a点与b点之间的距离ab,设定a点垂直至bc连线上的点为d点,通过陀螺仪测定ab与水平面之间的夹角α,中央处理器根据ab与α计算出a点与d点之间的距离ad及b点与d点之间的距离bd,其中ad=ab*cosα,bd=ab*sinα,cd=bc
‑
bd;
18.s3、通过调向机构不断调整设备机身使之在a点、b点、d点构成的平面上向下旋转,同时在旋转过程中通过激光测距仪实时测定距离c、通过陀螺仪测定实时设备机身与水平面之间的夹角β,中央处理器根据c与β实时计算出水平距离a及垂直距离b,其中a=c*cosβ,b=c*sinβ,当a=bd时,记录激光测距仪指向的点为f点,此时c等于a点与f点之间的距离af,b为d点与f点之间的距离df,通过存储器存储bc、bd、cd、ad、df、af的数值并输出至显示设备上。
19.综上所述,本发明相比于现有技术具有如下有益效果:
20.(1)该单点围岩变形测量装置只需临时固定在帮部一个锚杆头上或手动固定在帮部,通过该装置可轻松获得十字测点法观测数据,并且只需一人即可操作。打破了传统的拉线测量方式,设备轻巧、携带方便、操作简单。不需要多人同时作业,消除了登高作业的危险,减小了工人劳动强度,有效提高了工作效率和安全保障水平。
21.(2)通过驱动器驱动第一电动马达转动,带动第一主动齿轮及与之依次啮合的第
一从动齿轮及第一齿轮轴旋转,由于第一齿轮轴沿竖直方向转动并带动连接部及与之连接的设备机身左右转动,从而实现设备机身相对于固定装置左右旋转。通过驱动器驱动第二电动马达转动,带动第二主动齿轮及与之依次啮合的第二从动齿轮及第二齿轮轴旋转,由于第二齿轮轴沿水平方向转动并带动连接部及与之连接的设备机身沿上下转动,从而实现设备机身相对于固定装置上下旋转。
22.(3)通过设置无线遥控器并通过射频收发器与中央处理器连接,使整个装置操作更加便捷,提高工作效率。
附图说明
23.图1是背景技术中十字测点法的示意图;
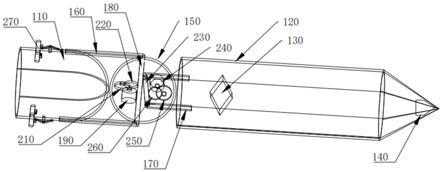
24.图2是本发明具体实施例1中单点围岩变形测量装置的部分结构示意图;
25.图3是本发明具体实施例1中单点围岩变形测量装置的测量过程图一;
26.图4是本发明具体实施例1中单点围岩变形测量装置的测量过程图二;
27.图5是本发明具体实施例1中单点围岩变形测量装置的测量过程图三;
28.附图中:110、固定套;120、设备机身;130、陀螺仪;140、激光测距仪;150、连接部;160、第一连接杆;170、第二连接杆;180、第一齿轮轴;190、第一电动马达;210、第一主动齿轮;220、第一从动齿轮;230、第二齿轮轴;240、第二电动马达;250、第二主动齿轮;260、第二从动齿轮;270、固定夹。
具体实施方式
29.为了使本领域的人员更好地理解本发明的技术方案,下面结合本发明的实施例,对本发明的技术方案进行清楚、完整的描述,基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的其它类同实施例,都应当属于本技术保护的范围。此外,以下实施例中提到的方向用词,例如“上”“下”“左”“右”等仅是参考附图的方向,因此,使用的方向用词是用来说明而非限制本发明创造。
30.具体实施例1
31.如图2所示,一种单点围岩变形测量装置,其包括依次相互转动连接的固定装置、连接部150及设备机身120,连接部150内设置有用于实现设备机身120相对于固定装置上下左右旋转的调向机构,设备机身120内分别设置有中央处理器、电池组、分别与中央处理器及电池组连接的驱动器、存储器、用于测量设备机身120与水平面之间夹角的陀螺仪130及激光测距仪140,驱动器与调向机构驱动连接,中央处理器上连接有显示屏,激光测距仪140设置于设备机身120远离连接部150一端且激光测距仪140发射的激光轴线与设备机身120轴线重合。通过固定装置将单点围岩变形测量装置固定于帮部的一锚杆头上或临时手动固定于帮部上,连接部150内通过设置调向机构实现设备机身120上下左右旋转,通过驱动器驱动调向机构动作,通过陀螺仪130测量设备机身120与水平面之间的夹角并将数据传输至中央处理器,通过激光测距仪140进行测距并将数据传输至中央处理器,电池组为驱动器、存储器、陀螺仪130及激光测距仪140供电,中央处理器处理后的数据经存储器存储并经显示屏输出。
32.具体的,本实施例中,中央处理器为中央处理芯片。
33.进一步地,调向机构包括竖直设置于连接部150内的第一齿轮轴180、水平设置于连接部150内的第二齿轮轴230、设置于连接部150内且与第一齿轮轴180啮合的第一齿轮组、设置于连接部150内且与第一齿轮组驱动连接的第一电动马达190、设置于连接部150内且与第二齿轮组驱动连接的第二电动马达240,第一电动马达190与第二电动马达240分别与驱动器连接,第一齿轮轴180与固定装置之间通过第一固定件固定连接,第二齿轮轴230与设备机身120之间通过第二固定件固定连接。进一步地,第一固定件由两根第一连接杆160组成,两根第一连接杆160的一端分别垂直连接于第一齿轮轴180的两端,另一端分别连接于固定装置上。
34.进一步地,第二固定件由两根第二连接杆170组成,两根第二连接杆170的一端分别垂直连接于第二齿轮轴230的两端,另一端分别连接于设备机身120上。
35.进一步地,第一齿轮组包括连接于第一电动马达190输出轴上的第一主动齿轮210、分别与第一主动齿轮210及第一齿轮轴180啮合的第一从动齿轮220,第二齿轮组包括连接于第二电动马达240输出轴上的第二主动齿轮250、分别与第二主动齿轮250及第二齿轮轴230啮合的第二从动齿轮260。驱动器驱动第一电动马达190转动带动第一主动齿轮210转动,从而带动与之依次啮合的第一从动齿轮220及第一齿轮轴180转动,实现设备机身120相对于固定装置的左右旋转。驱动器驱动第二电动马达240转动带动第二主动齿轮250转动,从而带动与之依次啮合的第二从动齿轮260及第二齿轮轴230转动,实现设备机身120相对于固定装置的上下旋转。
36.进一步地,固定装置固定于固定于帮部的一锚杆头上,固定装置包括套设于锚杆头上的固定套110、设置于固定套110上且将固定套110夹紧固定于锚杆头上的固定夹270,固定夹270设置至少一个。通过固定套110上的固定夹270将锚杆夹住,实现固定装置与该锚杆头的固定连接。本实施例中,固定夹270设置有两个,提高固定装置与该锚杆头的固定性及稳定性,提高测量精度。
37.另一较佳的实施例中,固定装置可手动固定于巷道内帮部上。
38.进一步地,固定套110的底部为圆球形,可以使固定套110内底部全面接触到锚杆头端部,提高固定套110与锚杆头的连接稳定性,从而提高测量精度。
39.进一步地,设备机身120内还设置有与中央处理器连接的射频收发器,对应射频收发器连接有无线遥控器。本实施例中,射频收发器包括射频发射电路及射频接收电路。无线遥控器通过射频收发器与中央处理器连接。使用时,遥控器向射频收发器发射信号并通过射频收发器传输至中央处理器,中央处理器接收信号并发出对驱动器的控制指令,驱动器驱动相应的第一电动马达190或第二电动马达240动作,从而使设备机身120按照一定角度口进行旋转。通过无线遥控器提高整个装置的使用便捷性。
40.进一步地,显示设备设置于无线遥控器或设备机身120上。本实施例中,显示设备为显示屏,该显示屏设置于无线遥控器上,便于人员的观察及记录。
41.另一较佳的实施例中,代替显示屏、无线遥控器及射频收发器,在设备机身120上设置显示操作面板,显示操作面板与中央处理器连接,人员可通过显示操作面板向中央处理器发送信号,中央处理器处理的数据、陀螺仪130测量的角度数据及激光测距仪140测量的距离数据也可通过显示操作面板显示出来。
42.测量作业完成后,可以通过蓝牙或数据线将测量的数据移动到其他设备上对数据
进行分析。
43.具体的,如果在大巷等难以在帮部找到锚杆的位置测量,可以将固定装置扣在帮部,并标记好位置,一只手临时固定该装置,另一只手调整设备机身120或遥控器进行测量。
44.如图3
‑
5所示,一种单点围岩变形测量方法,其包括以下步骤:
45.s1、将固定装置固定于帮部一锚杆头上,通过陀螺仪测量设备机身与水平面之间的夹角并通过调向机构将设备机身调整至水平,选取巷道顶板上的任意一点为a点,设备机身远离连接部一端端点设为b点,设备机身正对巷道帮部上的点设为c点,启动激光测距仪测定设备机身与设备机身正对巷道帮部之间的水平距离bc并记录;
46.s2、启动激光测距仪,通过调向机构调整设备机身使之激光测距仪发射的激光指向a点并测定a点与b点之间的距离ab,设定a点垂直至bc连线上的点为d点,通过陀螺仪测定ab与水平面之间的夹角α,中央处理器根据ab与α计算出a点与d点之间的距离ad及b点与d点之间的距离bd,其中ad=ab*cosα,bd=ab*sinα,cd=bc
‑
bd;
47.s3、通过调向机构不断调整设备机身使之在a点、b点、d点构成的平面上向下旋转,同时在旋转过程中通过激光测距仪实时测定距离c、通过陀螺仪测定实时设备机身与水平面之间的夹角β,中央处理器根据c与β实时计算出水平距离a及垂直距离b,其中a=c*cosβ,b=c*sinβ,当a=bd时,记录激光测距仪指向的点为f点,此时c等于a点与f点之间的距离af,b为d点与f点之间的距离df,通过存储器存储bc、bd、cd、ad、df、af的数值并输出至显示设备上。
48.具体的,设备机身在a点、b点、d点构成的平面上反向旋转的过程中,首先自水平方向减1度开始测量测定距离c,此时β=1
°
,通过中央处理器计算出a=c*cosβ,比较a与bd的大小,当a大于bd时重复上述步骤继续减1度,当a=bd时,记录激光测距仪指向的点为f点,此时c等于a点与f点之间的距离af,b为d点与f点之间的距离df,通过存储器存储bc、bd、cd、ad、df、af的数值并输出至显示设备上。
49.当a小于bd时,说明旋转角度过大,此时调整设备机身使其反向减少0.1度开始测量,参照上述步骤逐渐减少0.1度,直至a=bd,当a=bd时,记录激光测距仪指向的点为f点,此时c等于a点与f点之间的距离af,b为d点与f点之间的距离df,通过存储器存储bc、bd、cd、ad、df、af的数值并输出至显示设备上。本发明的旋转角度测量精度为0.1度,若想提高测量精度,可增加循环,可根据实际情况减小0.01度。
50.以上已将本发明做一详细说明,以上,仅为本发明之较佳实施例而已,当不能限定本发明实施范围,即凡依本技术范围所作均等变化与修饰,皆应仍属本发明涵盖范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1