自动伸缩遥控高空接线机械手臂的制作方法
1.本发明属于电力行业高空接线辅助装置技术领域,具体涉及一种自动伸缩遥控高空接线机械手臂。
背景技术:
2.高压电气试验往往需要进行高空接线,因此传统高空接线方式存在以下弊端。(1)存在高空坠落风险,作业人员利用设脚手架、高空作业车、升降平台作业时存在高空坠落的风险。(2)传统高空接线方法耗费时间长,工作效率低,高压电气试验在进行高空接线时需要借助脚手架、高空作业车、升降平台、或采取其它防止坠落措施,极大浪费了试验时间。因此机械发明一种能够实现快速高空接线的装置,以解决现有技术中的问题。
技术实现要素:
3.发明要解决的技术问题是:克服现有技术中的不足,提供了一种自动伸缩遥控高空接线机械手臂。
4.为解决上述问题,本发明采用的技术方案是:
5.一种自动伸缩遥控高空接线装置,包括自动伸缩杆机构、接线机械手机构和遥控手柄,所述接线机械手机构设置在所述自动伸缩杆机构的顶端;
6.所述接线机械手机构包括底座、活动块和固定块,所述活动块在所述底座上滑动,所述固定块固定在所述底座上,所述活动块和所述固定块相对的一侧上各设有凹槽,所述凹槽之间设有接线夹;
7.所述遥控手柄分别与所述自动伸缩杆机构和接线机械手机构电性连接。
8.根据上述技术方案进一步优选的,所述底座材质为环氧树脂绝缘材料,所述底座上设有t型轨道槽,所述活动块上设有与所述t型轨道槽配合的t型轨。
9.优选的,所述固定块与所述活动块之间设有弹簧和电磁铁;所述弹簧使所述固定块和所述活动块弹开,所述电磁铁使所述固定块和所述活动块吸合。
10.优选的,所述自动伸缩杆机构包括电机、传动装置和伸缩杆,所述电机与所述传动装置传动连接,所述传动装置与所述伸缩杆铰接。
11.优选的,所述伸缩杆为三节伸缩杆,所述伸缩杆由底部伸缩杆、中间伸缩杆和顶部伸缩杆组成,所述伸缩杆材质为环氧玻纤绝缘材料。
12.优选的,所述伸缩杆内同轴设三对限位管,所述三对限位管的长度分别对应三节所述伸缩杆的长度,所述限位管之间上下滑动同轴套合固定,所述限位管内穿设有与其适配的钢丝绳,所述钢丝绳的一端连接至所述限位管的顶端。所述钢丝绳的另一端连接所述传动装置。
13.优选的,所述传动装置包括卷线轴、从动轮、滚动轮和支撑板,所述卷线轴与所述支撑板转轴连接,所述卷线轴上绕设钢丝绳,所述从动轮设置在所述电机和所述卷线轴之间,所述从动轮分别与所述电机和所述卷线轴传动连接;所述滚动轮为两个,所述钢丝绳穿
设在两个所述滚动轮之间。
14.优选的,所述电磁铁为ele-p25/11电磁铁
15.优选的,所述电机为直流无刷电机。
16.优选的,所述遥控手柄上分别设有上行键、下行键和吸合键,所述上行键和下行键与电机电性连接,控制电机正反转,所述吸合键与电磁铁电性连接,控制电磁铁吸合。
17.与现有技术相比,发明的有益效果为:
18.本发明提供了一种自动伸缩遥控高空接线机械手臂,本发明可以实现不借助吊车等设备进行高空接线,因此避免因高接线带来的高空坠落风险和感应触电风险,具有较大的安全效益。使用安全、便捷,降低了现场工作人员的安全风险,提高了工作效率及效果,具有较高的应用价值,可替代传统高空接线方式,不仅可供电力行业使用,而且适用于所有无特殊要求的用电场合,应用范围广泛。
附图说明
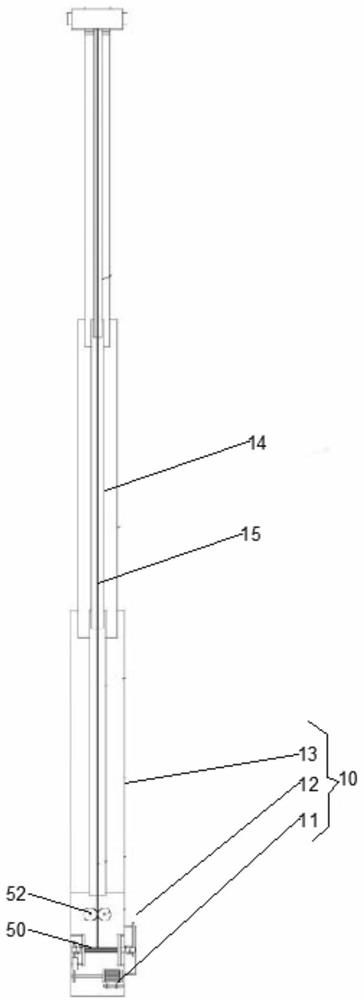
19.图1为本发明结构示意图;
20.图2为本发明传动装置结构示意图;
21.图3为本发明接线机械手机构结构示意图;
22.图4为本发明遥控手柄结构示意图。
23.图中:10、自动伸缩杆机构,11、电机,12、传动装置,13、伸缩杆,14、限位管,15、钢丝绳,20、接线机械手机构,21、底座,22、活动块,23、接线夹,24、固定块,25、凹槽,26,弹簧,27、电磁铁,28、t型轨道槽,29、t型轨,30、遥控手柄,31、上行键,32、下行键,33、吸合键,50、卷线轴,51,从动轮,52、滚动轮,53、支撑板。
具体实施方式
24.以下结合附图对发明做进一步详细说明,以下实施例仅用于更清楚的说明本发明的技术方案,本领域普通技术人员在本发明实施例方案基础上做出的改变均属本发明的保护范围。
25.如图1~图4所示,本发明提供了一种自动伸缩遥控高空接线机械手臂,包括自动伸缩杆机构10、接线机械手机构20和遥控手柄30,所述接线机械手机构20设置在所述自动伸缩杆机构10的顶端;所述接线机械手机构20包括底座21、活动块22和固定块24,所述活动块22在所述底座21上滑动,所述固定块24固定在所述底座21上,所述活动块22和所述固定块24相对的一侧上各设有凹槽25,所述凹槽25之间设有接线夹23;所述遥控手柄30分别与所述自动伸缩杆机构10和接线机械手机构20电性连接。包括自动伸缩杆机构10、接线机械手机构20和遥控手柄30,所述接线机械手机构20设置在所述自动伸缩杆机构10的顶端;所述接线机械手机构20包括底座21、活动块22和固定块24,所述活动块22在所述底座21上滑动,所述固定块24固定在所述底座21上,所述活动块22和所述固定块24相对的一侧上各设有凹槽25,所述凹槽25之间设有接线夹23;所述遥控手柄30分别与所述自动伸缩杆机构10和接线机械手机构20电性连接。本发明装置中所述活动块22和所述固定块24之间设有接线夹23,通过控制活动块22在底座21上滑动,控制接线夹23的开合,从而使接线夹23接触或分离被试设备。接线夹23上连接有测试线路,这样就可以把被试设备或者线路与测试设备或
线路连接起来。所述遥控手柄30可以控制所述自动伸缩杆机构10伸长或是缩短,所述接线机械手机构20安装在所述自动伸缩杆机构10的顶端,这样通过自动伸缩杆机构10的伸长或者缩短,就可以把接线机械手机构20送到被测试设备或线路处。本发明可以实现不借助吊车等设备进行高空接线,因此避免因高接线带来的高空坠落风险和感应触电风险,具有较大的安全效益。使用安全、便捷,降低了现场工作人员的安全风险,提高了工作效率及效果,具有较高的应用价值,可替代传统高空接线方式,不仅可供电力行业使用,而且适用于所有无特殊要求的用电场合,应用范围广泛。
26.如图3所示,优选的,所述底座21材质为环氧树脂绝缘材料,所述底座21固定在所述自动伸缩杆机构10的顶端,所述底座21材质为环氧树脂绝缘材料,防止在接线高压线路时通过底座21放电,发生威胁操作人员安全的事故。所述底座21上设有t型轨道槽28,所述活动块22上设有与所述t型轨道槽28配合的t型轨29。所述活动块22可沿t型轨道槽28自由滑动,通过活动块22与固定块24之间的开合,带动接线夹23的开合,并把被测试设备或者线路电接通。本发明实施例解决了高空接线难题,无需借助吊车设备,不需要人工高空操作接线,降低了跌落风险,安全可靠。
27.如图3所示,优选的,所述固定块24与所述活动块22之间设有弹簧26和电磁铁27;所述弹簧26使所述固定块24和所述活动块22弹开,所述电磁铁27使所述固定块24和所述活动块22吸合。所述活动块22和固定块24之间可通过电磁铁27吸合,带动接线夹23吸合,在不需要接线时,释放电磁铁27的吸力,活动块22在设置的弹簧26的作用下弹开,远离固定块24,接线夹23被打开,本发明接线装置离开被测试设备或者线路。所述弹簧26的长度略大于所述活动块22远离固定块24的最大量程,确保活动块22完全释放接线夹23。
28.优选的,所述自动伸缩杆机构10包括电机11、传动装置12和伸缩杆13,所述电机11与所述传动装置12传动连接,所述传动装置12与所述伸缩杆13铰接。本发明实施例中,通过电机11的正反转带动钢丝绳15伸长或是缩短,控制伸缩杆13的伸长或者缩短,实现接线机械手机构20到达被测试设备或者线路处。
29.优选的,所述伸缩杆13为三节伸缩杆,所述伸缩杆13由底部伸缩杆、中间伸缩杆和顶部伸缩杆组成,所述伸缩杆13材质为环氧玻纤绝缘材料。
30.如图1和图2所示,优选的,所述伸缩杆13内同轴设三对限位管14,所述三对限位管14的长度分别对应三节所述伸缩杆13的长度,所述限位管14之间上下滑动同轴套合固定,所述限位管14内穿设有与其适配的钢丝绳15,所述钢丝绳15的一端连接至所述限位管14的顶端。所述钢丝绳15的另一端连接所述传动装置12。传动装置12由卷线轴、限位管、钢丝绳三部分构成。卷线轴的一端连接有从动轮,从动轮配置有驱动其转动的直流无刷电机,伸缩杆内同轴设有对用的限位管,限位管之间上下滑动的同轴套合固定,限位管内穿设有与其适配的钢丝绳,钢丝绳的一端连接至限位管的顶端,另一端固定在卷线轴上。本发明实施例中通过利用钢丝绳15纵向强度较高、支持力强的特性,实现伸缩杆13自动伸缩功能,当需要伸长伸缩杆13时,通过电机11正反转,把钢丝绳15从卷线轴上释放,在钢丝绳15刚性力的作用下和限位管14限位力的作用下,带动伸缩杆13伸长。同理在需要伸缩杆13缩短时,只需要通过电机11正反转把钢丝绳15收回,即可实现伸缩杆13的缩短。伸缩杆13每节处都设有限位槽,可限制伸缩杆13伸缩的最大长度。
31.如图2所示,优选的,所述传动装置12包括卷线轴50、从动轮51、滚动轮52和支撑板
53,所述卷线轴50与所述支撑板53转轴连接,所述卷线轴50上绕设钢丝绳15,所述从动轮51设置在所述电机11和所述卷线轴50之间,所述从动轮51分别与所述电机11和所述卷线轴50传动连接;所述滚动轮52为两个,所述钢丝绳15穿设在两个所述滚动轮52之间。本发明实施例中通过利用钢丝绳15纵向强度较高、支持力强的特性,实现伸缩杆13自动伸缩功能。钢丝绳15通过电机11的正反转实现伸缩。钢丝绳15在伸长时,通过滚动轮52和限位管14的作用下,可以实现刚度特性,推动伸缩杆13伸长。
32.优选的,所述电磁铁27为ele-p25/11电磁铁。本发明实施例中,所述电磁铁27采用的是ele-p25/11电磁铁,其直流为12v,吸力5kg,重量28g。当电磁铁27通电后产生吸力带动活动块22沿轨道移动,此时如果接线夹放在活动块内则接线夹23将被夹紧;当电磁铁27断电后,为了将活动块22分开,在活动块22和固定块24之间安装一个弹簧26,在没有电磁铁吸引力作用是,弹簧26会将活动块22和固定块24分开。弹簧26长度选择稍微长于轨道长度。
33.优选的,所述电机11为直流无刷电机。
34.优选的,所述遥控手柄30上分别设有上行键31、下行键32和吸合键33,所述上行键31和下行键32与电机11电性连接,控制电机11正反转,所述吸合键33与电磁铁27电性连接,控制电磁铁27吸合。遥控操作完成的功能是,伸缩杆13的伸长或收缩、电磁铁27的吸合三部分功能。单独控制系统共分三按钮分别对应三个需要控制的功能。伸缩杆13的伸长功能通过按上行按键31,伸缩杆13则自动伸长,松开上行按键31,伸缩杆13则停止伸长;收缩功能通过按下行按键32的按钮,伸缩杆13则自动收缩,松开按钮,伸缩杆13停止收缩;高空接线机械手机构20吸合接线夹功能通过摁下中间红色吸合按键33按钮,接线夹则慢慢被夹紧,松开按钮,接线夹则恢复开合状态。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1