一种干涉三维形貌解算方法
1.本发明属于表面貌形测量技术领域,具体涉及一种干涉三维形貌解算方法。
背景技术:
2.现有技术中已有众多学者围绕白光干涉图解算问题开展了一系列研究工作,将这些研究工作可以总结为三个主要技术发展方向:
3.1、直接求解法,具体包括插值法、移相法、空间频域法;
4.2、加权平均法,具体包括重心法、相干相关法;
5.3、包络曲线拟合法,具体包括多项式拟合法、高斯拟合法、傅里叶变换法、希尔伯特变换法、小波变换法、基于采样定理的包络曲线函数计算法。
6.在面对完美的信号时,上述每一种方法均会得出近于理想的解,但当光谱退化回射信号或者强度衰减回射信号与标准反射镜的回射信号生成干涉图时,将会发生干涉信号包络曲线展宽、信号对比度下降等问题,同时夹杂多级干涉杂光信号,将产生更为劣化的待处理干涉图(如图2a、图2b所示)。利用上述方法均难以获取高还原精度的目标表面三维形貌。
技术实现要素:
7.本发明为了解决现有技术中的缺陷,提出了一种干涉三维形貌解算方法,由于多级叠加光场是仪器内部产生的,具有确定性;相同表面零级干涉条纹的顶峰具有唯一性;以及“光谱退化效应”不影响包络曲线峰值相对位置。因此,尽管在“包络曲线展宽”、“信号对比度下降”等问题的影响下,被测目标的干涉强度空间分布依然具有稳定性,通过获取零级干涉条纹位置z0,将z0与标定状态下顶峰空间偏移量δl做和便可求得待测目标的真实位置zd。
8.为实现上述目的,本发明采用以下具体技术方案:
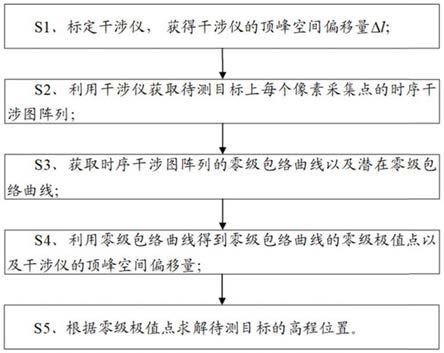
9.一种干涉三维形貌解算方法,包括步骤:
10.s1、利用标准镜对干涉仪进行标定,获得干涉仪的顶峰空间偏移量δl;
11.s2、利用干涉仪获取待测目标上每个像素采集点p(xi,yj)的时序干涉图阵列;时序干涉图阵列为n张具有干涉条纹的干涉图像;
12.s3、获取时序干涉图阵列的零级包络曲线以及潜在零级包络曲线;
13.s4、利用零级包络曲线得到零级包络曲线的零级极值点z0(xi,yj);
14.s5、根据零级极值点z0(xi,yj)求解待测目标的高程位置zd(xi,yj):
15.zd(xi,yj)=δl(xi,yj)+z0(xi,yj)
ꢀꢀ
(1)。
16.优选地,标准镜为理想标准平面反射镜、球面镜或非球面镜;
17.标准镜与待测目标具有相同的光谱反射特性。
18.优选地,步骤s3包括以下步骤:
19.s31、判断n个位于时序干涉图阵列中同一像素位置(xi,yj)处的采样点p(n,xi,yj)
是否为极值点pe(n,xi,yj),或为过渡点p
t
(n,xi,yj),n∈[1,m],m为预设值;
[0020]
s32、根据极值点pe(n,xi,yj)得到时序干涉图阵列的零级包络曲线以及潜在零级包络曲线。
[0021]
优选地,步骤s31包括以下步骤:
[0022]
s311、对n张干涉图像上的各个采样点p(n,xi,yj)进行曝光,获得各个采样点p(n,xi,yj)在干涉图像上的强度值i(n,xi,yj);
[0023]
s312、根据位于时序干涉图阵列中同一位置的n个采样点p(n,xi,yj)所在的干涉图像上的强度值i(n,xi,yj),构建数据立方体s;数据立方体s的构建模型如下:
[0024]
s(n,i,j)=[i(n+1,xi,yj)-i(n,xi,yj)]
×
[i(n,xi,yj)-i(n-1,xi,yj)]
ꢀꢀ
(2);
[0025]
其中,
[0026]
i(n,xi,yj)表示采样点p(n,xi,yj)在时序干涉图阵列中第n张干涉图像上的强度值;
[0027]
i(n+1,xi,yj)表示采样点p(n+1,xi,yj)在时序干涉图阵列中第n+1张干涉图像上的强度值;
[0028]
i(n-1,xi,yj)表示采样点p(n-1,xi,yj)在时序干涉图阵列中第n-1张干涉图像上的强度值;
[0029]
s313、判断采样点p(n,xi,yj)是否为时序干涉图阵列的极值点:
[0030]
若s(n,i,j)≤0,则采样点p(n,xi,yj)为极值点pe(n,xi,yj);
[0031]
若s(n,i,j)》0,则采样点p(n,xi,yj)为过渡点p
t
(n,xi,yj)。
[0032]
优选地,步骤s32的方法为:
[0033]
将每个像素采集点p(xi,yj)对应在时序干涉图阵列上的极值点排序,选取至少三个强度值按降序排列的第一极值点pe(na,xi,yj)、第二极值点pe(nb,xi,yj)和第三极值点pe(nc,xi,yj),存在如下关系:
[0034]
ie(na,xi,yj)<ie(nb,xi,yj);
[0035]
ie(nb,xi,yj)>ie(nc,xi,yj);
[0036]
其中,ie(na,xi,yj)为第一极值点pe(na,xi,yj)的强度值,
[0037]
ie(nb,xi,yj)为第二极值点pe(nb,xi,yj)的强度值,
[0038]
ie(nc,xi,yj)为第三极值点pe(nc,xi,yj)的强度值;
[0039]
则第二极值点pe(nb,xi,yj)位于零级包络曲线;
[0040]
第一极值点pe(na,xi,yj)和第三极值点pe(nc,xi,yj)位于潜在零级包络曲线。
[0041]
优选地,步骤s4包括以下步骤:
[0042]
s41、根据位于零级包络曲线的极值点pe(nk,xi,yj)及过渡点p
t
(nk,xi,yj)获取零级包络曲线的零级极值点z0(xi,yj)。
[0043]
优选地,零级极值点z0(xi,yj)的获取方法为:
[0044]
选取至少两个位于零级包络曲线的极值点pe(nk,xi,yj)附近的第一过渡点p
t
(n
k+1
,xi,yj)和第二过渡点p
t
(n
k-1
,xi,yj),利用拟合的方法,对零级包络曲线的极值点pe(nk,xi,yj)、第一过渡点p
t
(n
k+1
,xi,yj)和第二过渡点p
t
(n
k-1
,xi,yj)进行拟合,得到零级极值点z0(xi,yj)。
[0045]
优选地,拟合的方法包括拟合法、重心法或插值法中的至少一种。
[0046]
优选地,步骤s4还包括以下步骤:
[0047]
s42、拟合潜在零级包络曲线的零级极值点z
′0(xi,yj),利用先验条件对错误的零级极值点z0(xi,yj)进行替换;
[0048]
先验条件为:待测目标的连续平面测量数据无高程跳变错位。
[0049]
优选地,步骤s1包括以下步骤:
[0050]
s11、利用已知面型的标准镜对干涉仪进行标定,得到的标准镜的标准面型分布
[0051]
s12、通过利用干涉仪获取标准镜上每个像素采集点的时序干涉图阵列,计算获得标准镜的变形分布z(xi,yj);
[0052]
s13、计算干涉仪内部由于光程不匹配所引起的顶峰空间偏移量δl(xi,yj):
[0053][0054]
优选地,干涉仪为宽谱段白光干涉仪或窄谱段激光干涉仪。
[0055]
本发明能够取得以下技术效果:
[0056]
1、本发明在空间域中进行,避免了傅里叶变换、卷积等频域大计算量过程,提高了算法的实时性。
[0057]
2、本发明通过对子包络曲线拟合,具有较高的拟合精度,可以应用于低反射率表面的三维形貌解算。
[0058]
3、本发明适用于低反射率样品,在工业测量、科学研究等实际工况下具有前景。
附图说明
[0059]
图1是本发明一个实施例的一种干涉三维形貌解算方法的流程图;
[0060]
图2a是背景技术中利用迈克尔逊白光干涉系统测量获得的干涉信号示意图
[0061]
图2b是背景技术中的相同系统由于光谱退化效应而导致干涉图发生改变的干涉信号示意图;
[0062]
图3是本发明一个实施例的零级干涉条纹极大值点z0、顶峰位置zd和标定状态下顶峰空间位置偏移量δl的相对位置关系图;
[0063]
图4a是本发明一个实施例的台阶处三维形貌解算图;
[0064]
图4b是图4a的重心截面图;
[0065]
图5a是利用傅里叶变换法获得的台阶处三维形貌解算图;
[0066]
图5b是图5a的重心截面图;
[0067]
图6a是利用重心法获得的台阶处三维形貌解算图;
[0068]
图6b是图6a的重心截面图。
具体实施方式
[0069]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及具体实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,而不构成对本发明的限制。
[0070]
本发明的目的是提供一种干涉三维形貌解算方法,下面将对本发明提供的一种干
涉三维形貌解算方法,通过具体实施例来进行详细说明。
[0071]
在常规白光干涉图中,由于“多重干涉叠加效应”、“光谱退化效应”等因素影响,外包络曲线的顶峰值zd和零级干涉条纹(子包络曲线)的中心位置z0往往不重合,存在如图3所示的位置关系。因此,本发明提出的干涉三维形貌解算方法通过精确求解出零级干涉条纹中心所在位置z0和标定状态下顶峰位置偏移δl,便可获得待测目标的真实位置zd。
[0072]
参照图1示出的干涉三维形貌解算方法的流程,该方法包括以下步骤:
[0073]
s1、利用标准镜对干涉仪进行标定,获得干涉仪的顶峰空间偏移量δl,存在如下表达式:
[0074][0075]
其中,为经干涉仪得到的标准镜的标准面型分布;
[0076]
z(xi,yj)为利用本发明的一种干涉三维形貌解算方法得到的标准镜的变形分布。
[0077]
s2、利用干涉仪获取待测目标上每个像素采集点p(xi,yj)的时序干涉图阵列。
[0078]
在本发明的一个优选实施例中,以待测目标为台阶为例,利用完成标定的白光干涉仪获取台阶的采集域内每一个像素采集点p(xi,yj)的时序干涉图阵列。时序干涉图阵列为n张具有干涉条纹的干涉图像,干涉图像上的每一个像素点具有“空间-强度”的变化信息。
[0079]
s3、获取时序干涉图阵列的零级包络曲线以及潜在零级包络曲线,具体包括以下步骤:
[0080]
s31、判断n个位于时序干涉图阵列中同一像素位置(xi,yj)处的采样点p(n,xi,yj)是否为极值点pe(n,xi,yj),或为过渡点p
t
(n,xi,yj),n∈[1,m],m为预设值;
[0081]
在台阶的采集域内,每一个像素采集点p(xi,yj)都对应一个获取的台阶时序干涉图阵列中的采样点p(n,xi,yj),判断该采样点p(n,xi,yj)是极值点pe(n,xi,yj)还是过渡点p
t
(n,xi,yj)。
[0082]
步骤s31具体包括以下步骤:
[0083]
s311、对n张干涉图像上的各个采样点p(n,xi,yj)进行曝光,获得每一个采样点p(n,xi,yj)在干涉图像上的强度值i(n,xi,yj);
[0084]
其中,i,j代表位置,n代表采样时序,
[0085]
n∈[1,m],m为预设值,m的取值根据待测目标的高程值与采样间隔设定。
[0086]
s312、根据位于时序干涉图阵列中同一位置的n个采样点p(n,xi,yj)所在的干涉图像上的强度值i(n,xi,yj),构建数据立方体s。
[0087]
以任意一个采集点(x1,y1)为例,因时序干涉图阵列由n个干涉图像组成,因此,采集点(x1,y1)对应在时序干涉图阵列中各个干涉图像的采样点为p(1,x1,y1)、p(2,x1,y1)、
…
、p(n,x1,y1)、p(n+1,x1,y1)、
…
、p(n,x1,y1)。对应得到的强度值为i(1,x1,y1)、i(2,x1,y1)、
…
、i(n,x1,y1)。
[0088]
同理,获得同一位置(xi,yj),不同时序的所有采样点p(n,xi,yj)在干涉图像上的强度值i(n,xi,yj),建立如下的数据立方体s模型:
[0089]
s(n,i,j)=[i(n+1,xi,yj)-i(n,xi,yj)]
×
[i(n,xi,yj)-i(n-1,xi,yj)]
ꢀꢀ
(2);
[0090]
其中,i(n,xi,yj)表示采样点p(n,xi,yj)在时序干涉图阵列中第n张干涉图像上的
强度值;
[0091]
i(n+1,xi,yj)表示采样点p(n+1,xi,yj)在时序干涉图阵列中第n+1张干涉图像上的强度值;
[0092]
i(n-1,xi,yj)表示采样点p(n-1,xi,yj)在时序干涉图阵列中第n-1张干涉图像上的强度值。
[0093]
s313、判断采样点p(n,xi,yj)为时序干涉图阵列的极值点,否则为过渡点:
[0094]
若s(n,i,j)≤0,则采样点p(n,xi,yj)为极值点pe(n,xi,yj);
[0095]
若s(n,i,j)》0,则采样点p(n,xi,yj)为过渡点p
t
(n,xi,yj)。
[0096]
s32、根据极值点pe(n,xi,yj)得到时序干涉图阵列的零级包络曲线以及潜在零级包络曲线。
[0097]
在本发明的一个优选实施例中,将得到的每个像素采集点p(xi,yj)对应在时序干涉图阵列上的极值点排序,选取强度值按降序排列的第一极值点pe(na,xi,yj)、第二极值点pe(nb,xi,yj)和第三极值点pe(nc,xi,yj)。
[0098]
即存在第一极值点pe(na,xi,yj)的强度值ie(na,xi,yj)<第二极值点pe(nb,xi,yj)的强度值ie(nb,xi,yj);同时第二极值点pe(nb,xi,yj)的强度值ie(nb,xi,yj)>第三极值点pe(nc,xi,yj)的强度值ie(nc,xi,yj)。
[0099]
则第二极值点pe(nb,xi,yj)所在的子包络曲线为零级包络曲线;
[0100]
第一极值点pe(na,xi,yj)和第三极值点pe(nc,xi,yj)所在的子包络曲线为潜在零级包络曲线。
[0101]
对于选取任意前奇数个强度值最大的极值点,中间强度值对应的极值点所在的子包络曲线为零级包络曲线,其他极值点位于潜在零级包络曲线。
[0102]
在本发明的另一个实施例中,还可以选取两个强度值最大的第四极值点p(nf,xi,yj)和第五极值点p(ng,xi,yj),对应如下的强度关系:ie(nf,xi,yj)<ie(ng,xi,yj);
[0103]
则强度值较大的极值点p(ng,xi,yj)所在的子包络曲线为零级包络曲线;
[0104]
极值点p(nf,xi,yj)所在的子包络曲线为潜在零级包络曲线。
[0105]
对于选取任意前偶数个强度值最大的极值点,强度值最大的极值点所在的子包络曲线为零级包络曲线,其他极值点位于潜在零级包络曲线。
[0106]
对于如图2b所示的多层膜系的情况,可根据实际情况选择各个外包络组中强度极大值的极值点所在的子包络曲线为零级包络曲线。
[0107]
s4、利用零级包络曲线得到零级包络曲线的零级极值点z0(xi,yj)。
[0108]
步骤s4包括以下步骤:
[0109]
s41,根据位于零级包络曲线的极值点pe(nk,xi,yj)及过渡点p
t
(nk,xi,yj)通过拟合的方法获取零级包络曲线的零级极值点z0(xi,yj)。
[0110]
在本发明的一个优选实施例中,选择第二极值点pe(nb,xi,yj)及其附近的四个过渡点pe(n
b-2
,xi,yj)、pe(n
b-1
,xi,yj)、pe(n
b+1
,xi,yj)和pe(n
b+2
,xi,yj)共同拟合出零级包络曲线的零级极值点z0(xi,yj)。
[0111]
进一步的,选则相对拟合精度较高的拟合法对第二极值点pe(nb,xi,yj)、第一过渡点pe(n
b-2
,xi,yj)、第二过渡点pe(n
b-1
,xi,yj)、第三过渡点pe(n
b+1
,xi,yj)和第四过渡点pe(n
b+2
,xi,yj)进行拟合,通过计算获得连续的数学曲线,获得零级极值点z0(xi,yj)。拟合法为
现有技术,不在此赘述。
[0112]
在本发明的另一个实施例中,还可以选择包括但不限于重心法或插值法的方法对上述极值点和过渡点进行拟合,得到零级极值点z0(xi,yj)。
[0113]
s5、根据零级极值点z0(xi,yj)求解出待测目标的高程位置zd(xi,yj):
[0114]
zd(xi,yj)=δl(xi,yj)+z0(xi,yj)
ꢀꢀ
(1)。
[0115]
在实际零级包络曲线的极大值点z0(xi,yj)求解过程中,可能发生解算错位现象,即误把潜在零级包络曲线代替零级包络曲线重新生成测量数据,因此步骤s4还包括:
[0116]
s42、拟合潜在零级包络曲线的零级极值点z
′0(xi,yj),利用先验条件对错误的零级极值点z0(xi,yj)进行替换;
[0117]
先验条件可根据实际情况设定,可以设定为:待测目标的连续平面测量数据无高程跳变错位。
[0118]
具体的,按照步骤s5中的方法,对位于潜在零级包络曲线的第一极值点pe(na,xi,yj)和第三极值点pe(nc,xi,yj)分别进行拟合,获取潜在零级包络曲线的零级极值点z
′0(xi,yj)和z
″0(xi,yj)。
[0119]
即对第一极值点pe(na,xi,yj)以及第一极值点附近的四个过渡点pe(n
a-2
,xi,yj)、pe(n
a-1
,xi,yj)、pe(n
a+1
,xi,yj)和pe(n
a+2
,xi,yj)进行拟合,得到潜在零级包络曲线的零级极值点z
′0(xi,yj);
[0120]
对第三极值点pe(nc,xi,yj)以及第三极值点附近的四个过渡点pe(n
c-2
,xi,yj)、pe(n
c-1
,xi,yj)、pe(n
c+1
,xi,yj)和pe(n
c+2
,xi,yj)进行拟合,得到潜在零级包络曲线的零级极值点z
″0(xi,yj)。
[0121]
假设已知待测台阶的表面为平滑表面,而得到的解算后的三维貌形数据发生了断崖式跳变,则考虑用潜在零级包络曲线的零级极值点z
′0(xi,yj)或z
″0(xi,yj)替代错误的零级极值点z0(xi,yj),利用式(1)重新求解出待测目标的高程位置zd(xi,yj)。
[0122]
因此,本发明提出的干涉三维形貌解算方法,一方面没有使用高斯函数进行滤波,降低了计算量;
[0123]
一方面不需要对全部的采样点进行滤波,提高了算法的实时性;同时利用了子包络曲线具有更大的陡度的特点,使得算法的拟合精度高。
[0124]
另一方面,本发明同样适用于窄谱段激光光源的干涉仪,如法布里-珀罗干涉仪、迈克尔逊干涉仪、马赫曾德干涉仪、塞格纳克干涉仪、斐索干涉仪等。
[0125]
在本发明的一个优选实施例中,步骤s1中对干涉仪进行标定,获得干涉仪的顶峰空间偏移量δl,具体包括以下步骤:
[0126]
s11、利用已知面型的标准镜对干涉仪进行标定,计算经干涉仪获得的标准镜的标准面型分布
[0127]
在本发明的另一个优选实施例中,标准镜选取理想标准平面反射镜,利用已知面型的具有理想平面的标准平面反射镜对宽谱段白光干涉仪进行标定。
[0128]
由于标准镜的反射信号强,对比度高,因此可利用常规方法,如小波变换法计算获取标准平面反射镜的面型分布将其视为标准值。
[0129]
在本发明的另一个实施例中,标准镜还可选取已知面型的球面镜或非球面镜;通
过选择与待测目标具有相同的光谱反射特性的标准镜,可以使用于标定的干涉图与实际测量的干涉图具有更好的相似度,有利于提高测量准确度。
[0130]
s12、通过利用干涉仪获取标准镜上每个像素采集点的时序干涉图阵列,计算获得标准镜的变形分布z(xi,yj)。
[0131]
具体包括以下步骤:
[0132]
s121、获取标准镜的时序干涉图阵列的零级包络曲线;
[0133]
s122、利用标准镜的时序干涉图阵列的零级包络曲线得到标准镜的零级包络曲线的极值点和过渡点;
[0134]
s123、利用标准镜的零级包络曲线的极值点和过渡点获取标准镜上每个像素采集点的零级包络曲线的极点高程位置;
[0135]
s124、根据高程位置计算获得标准镜的变形分布z(xi,yj)。
[0136]
步骤s12中标准镜的零级包络曲线的极值点和过渡点的获取方法与上述实施例中台阶的零级包络曲线的极值点和过渡点的获取方法相同,在此不再赘述。
[0137]
s13、计算干涉仪内部由于光程不匹配所引起的顶峰空间偏移量δl(xi,yj):
[0138][0139]
图4a、图5a和图6a分别示出了利用本发明的方法、傅里叶变换法以及重心法获取同一台阶处三维形貌解算图,图4b、图5b和图6b分别示出了对应的重心截面图。
[0140]
从图中可以看出,利用本发明计算获取台阶上表面面型平整度rms值为0.038μm,下表面面型平整度rms值为0.009μm,高度为1.755μm,与标准值1.761μm的差值为6nm。
[0141]
相比于传统的傅里叶变换法(上表面rms值为0.045μm,下表面rms值为0.015μm),上表面rms值减小了15.6%,下表面rms值减小了40%;
[0142]
相比于传统的重心法(上表面rms值为0.045μm,下表面rms值为0.017μm),上表面rms值减小了15.6%,下表面rms值减小了47%。
[0143]
通过上述数据可以发现,本发明的方法能够表现出更为准确的平面特征,测量获取的高程测量误差位于
±
0.01μm区间(标准台阶给定误差带范围),具有非常高的可信度。
[0144]
另一方面,台阶样品以硅为基底,经过化学刻蚀而制成,硅材质偏黑色,具有相对较低的光谱反射率,导致信号的信噪比相对较低,因此解算效果并不理想。但利用本发明提出的方法,即可以大幅提高表面面型精度(rms值),又使得高度差在标定范围内。可应用于低反射率样品,具有应用于工业测量、科学研究等实际工况的前景。
[0145]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
[0146]
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述
实施例进行变化、修改、替换和变型。
[0147]
以上本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所作出的各种其他相应的改变与变形,均应包含在本发明权利要求的保护范围内。。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1