无边界颗粒扭剪加载空心圆筒光弹实验装置及其使用方法
1.本发明涉及颗粒力学光弹测试技术,具体地涉及一种无边界颗粒扭剪加 载空心圆筒光弹实验装置及其使用方法。
背景技术:
2.光弹实验法是通过偏振光场产生的干涉条纹形成直观的应力条纹信息, 使得颗粒材料内部的应力分布更直观的展现,而其能够通过对条纹图像中的 等差线分析出应力的大小。
3.光弹实验法是迄今为止最能直观表现颗粒体系内部受力情况的实验手 段,但现有的光弹仪器大多数是对二维的颗粒材料进行轴向加载、剪切加载、 轴向荷载和剪切荷载耦合作用加载,再观测其内部应力分布情况,无法对三 维的颗粒材料进行加载。
技术实现要素:
4.本发明的目的是提供一种无边界颗粒扭剪加载空心圆筒光弹实验装置 及其使用方法,该无边界颗粒扭剪加载空心圆筒光弹实验装置可以在无水和 有水的两种状态下进行加载,通过加载装置对颗粒试样进行竖向加载、扭剪 加载以及环向移动加载,实现在不同加载路径下,观测颗粒试样的内部应力 分布情况。
5.为了实现上述目的,本发明提供了一种无边界颗粒扭剪加载空心圆筒光 弹实验装置,该无边界颗粒扭剪加载空心圆筒光弹实验装置包括:光源、摄 像装置、加载装置、加压装置和有底的透明环形加载筒,所述光源设置于所 述透明环形加载筒的中心位置用于向外发射平行光源;所述透明环形加载筒 的内壁自内而外依次设置为起偏振片和第一1/4拨片,所述透明环形加载筒 的外壁自内而外依次设置为第二1/4拨片和检偏振片,所述摄像装置设置于 所述透明环形加载筒的外部并朝向所述透明环形加载筒的侧面拍摄;所述透 明环形加载筒的上方设置有环形加载板,所述环形加载板的底面沿周向排列 设置有多个能够伸入所述透明环形加载筒内且高度可调的弧形压头,多个所 述弧形压头的下方设置有可拆卸的密封圈;所述加载装置的下端设置为能够 以竖向轴转动的轴体,所述轴体与所述加载装置主体之间设置有制动装置, 当所述制动装置锁定时,所述轴体能够相对所述加载装置转动;所述轴体的 下端通过压扭复合力传感器与所述环形加载板连接,所述透明环形加载筒的 上部的外侧设置有进水接口、出水接口和加压接口,所述加压接口与所述加 压装置相连接。
6.优选地,所述加载装置包括:手动加载手柄、手动加载模组和所述制动 装置,所述手动加载手柄螺旋贯穿所述手动加载模组后通过所述制动装置与 所述轴体连接。
7.优选地,所述环形加载板上沿周向方向设置有多个通孔,所述通孔内安 装有螺母;与所述螺母相配合的螺栓贯穿所述螺母设置并活动连接于相应的 所述弧形压头;所述弧形压头上设置有至少两个导向杆,所述环形加载板上 设置有与所述导向杆对应的导向孔。
8.优选地,每个所述螺栓的一侧均设置有用于测量相应所述螺栓位移量的 位移计。
9.优选地,所述位移计为百分表或红外测距仪。
10.优选地,所述无边界颗粒扭剪加载空心圆筒光弹实验装置还包括:承载 装置;其中,所述承载装置包括顺次连接的底座、支架和悬架,所述加载装 置安装于所述悬架上,所述光源安装于所述底座上,所述透明环形加载筒夹 持固定于所述底座上。
11.优选地,所述底座上设置有用于夹持所述透明环形加载筒的固定装置。
12.优选地,所述摄像装置设置有3-6个,且呈周向分布于所述透明环形加 载筒的周围。
13.本发明还提供了一种光弹实验装置的使用方法,该使用方法使用所述无 边界颗粒扭剪加载空心圆筒光弹实验装置,所述使用方法包括以下步骤:
14.1)将颗粒试样放入透明环形加载筒的内部;
15.2)锁紧或打开制动装置;
16.3)操作加载装置使得弧形压头与颗粒试样接触;
17.4)通过加载装置或单独调节弧形压头的高度对颗粒试样进行加载;
18.5)记录弧形压头在不同位移量时压扭复合力传感器的力学数值,同时 通过摄像装置记录颗粒试样的应力图像;
19.6)通过计算机对步骤5)中所记录的数值以及应力图像进行分析。
20.可选地,在步骤1)之前将密封圈安装在多个所述弧形压头的下方;在 步骤3)和步骤4)之间还包括以下步骤:打开进水接口和出水接口的止水 阀并向所述透明环形加载筒内加水,直到出水接口处有水流出时关闭进水接 口和出水接口的止水阀,再通过所述加压装置向所述透明环形加载筒内加压 至所需要的压强。
21.根据上述技术方案,本发明中的无边界颗粒扭剪加载空心圆筒光弹实验 装置可以在无水和有水的两种状态下进行加载,通过加载装置对颗粒试样进 行竖向加载、扭剪加载以及环向移动加载,实现在不同加载路径下,观测颗 粒试样的内部应力分布情况。
22.本发明的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
23.附图是用来提供对本发明的进一步理解,并且构成说明书的一部分,与 下面的具体实施方式一起用于解释本发明,但并不构成对本发明的限制。在 附图中:
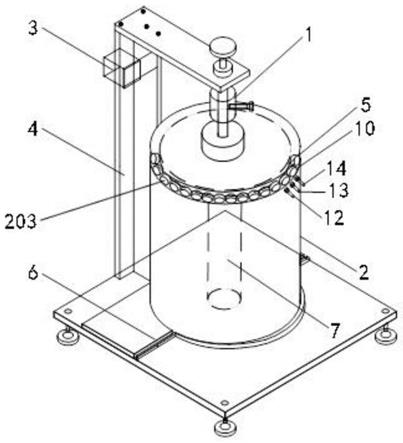
24.图1是无边界颗粒扭剪加载空心圆筒光弹实验装置的一种优选实施方式 的整体结构示意图;
25.图2是无边界颗粒扭剪加载空心圆筒光弹实验装置的一种优选实施方式 的侧面结构示意图;
26.图3是无边界颗粒扭剪加载空心圆筒光弹实验装置的一种优选实施方式 的局部俯视结构示意图;
27.图4是摄像装置的一种优选实施方式的布置方式示意图;
28.图5是弧形压头与螺栓之间的一种优选实施方式的连接示意图;
29.图6是无边界颗粒扭剪加载空心圆筒光弹实验装置的一种优选实施方式 的侧面局部结构示意图;
30.图7是加压装置的一种优选实施方式的结构示意图;
31.图8是位移计的一种优选实施方式的结构示意图。
32.附图标记说明
33.1-加载装置;2-透明环形加载筒;3-加载力学数值显示器;4-承载装置; 5-弧形压头;6-固定装置;7-光源;8-摄像装置;9-计算机;10-密封圈;11
‑ꢀ
加压装置;12-进水接口;13-出水接口;14-加压接口;101-手动加载手柄; 102-手动加载模组;103-制动装置;104-压扭压扭复合力传感器;105-环形 加载板;106-位移计;201-起偏振片;202-第一1/4拨片;203-颗粒试样; 204-第二1/4拨片;205-检偏振片;501-螺栓;502-螺母;503-导向杆。
具体实施方式
34.以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是, 此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发 明。
35.在本发明中,在未作相反说明的情况下,“上下左右、前后内外”等包 含在术语中的方位词仅代表该术语在常规使用状态下的方位,或为本领域技 术人员理解的俗称,而不应视为对该术语的限制。
36.参见图1-8所示的无边界颗粒扭剪加载空心圆筒光弹实验装置,该无边 界颗粒扭剪加载空心圆筒光弹实验装置包括:光源7、摄像装置8、加载装 置1、加压装置11和有底的透明环形加载筒2,所述光源7设置于所述透明 环形加载筒2的中心位置用于向外发射平行光源7;所述透明环形加载筒2 的内壁自内而外依次设置为起偏振片201和第一1/4拨片202,所述透明环 形加载筒2的外壁自内而外依次设置为第二1/4拨片204和检偏振片205, 所述摄像装置8设置于所述透明环形加载筒2的外部并朝向所述透明环形加 载筒2的侧面拍摄;所述透明环形加载筒2的上方设置有环形加载板105, 所述环形加载板105的底面沿周向排列设置有多个能够伸入所述透明环形加 载筒2内且高度可调的弧形压头5,多个所述弧形压头5的下方设置有可拆 卸的密封圈10;所述加载装置1的下端设置为能够以竖向轴转动的轴体,所 述轴体与所述加载装置1主体之间设置有制动装置103,当所述制动装置103 锁定时,所述轴体能够相对所述加载装置1转动;所述轴体的下端通过压扭 复合力传感器104与所述环形加载板105连接,所述透明环形加载筒2的上 部的外侧设置有进水接口12、出水接口13和加压接口14,所述加压接口14 与所述加压装置11相连接。
37.通过上述技术方案的实施,无边界颗粒扭剪加载空心圆筒光弹实验装置 可以在无水和有水的两种状态下进行加载,通过加载装置1对颗粒试样203 进行竖向加载、扭剪加载以及环向移动加载,实现在不同加载路径下,观测 颗粒试样203的内部应力分布情况。使用时,向透明环形加载筒2内填充充 颗粒试样203,开启光源7,使平行光源7依次沿着起偏振片201、第一1/4 拨片202、颗粒试样203、第二1/4拨片204、检偏振片205和摄像装置8 传播,摄像装置8会采集到颗粒试样203的应力变化图像,最后通过计算机 9对其应力图像进行分析。
38.在本发明中,加载状态可分为无水状态和有水状态,当加载状态为无水 状态时,不需要安装密封圈10,使得弧形压头5直接与颗粒试样203接触进 行加载即可,当加载状态为有水状态时,需要在弧形压头5的下方安装密封 圈10,如安装o型密封圈,o型密封圈与透明环形加载筒2的内壁之间应 当过盈配合以实现密封,然后通过进水接口12和出水接口13
向透明环形加 载筒2内加水,加满后关闭进水接口12和出水接口13,再通过加压装置11 向加压装置11内进行加压,最后通过o型密封圈与颗粒试样203接触进行 加载即可。
39.本发明中的加载模式分为三种:1、竖向加载模式,在该模式下加载时, 需要锁紧制动装置103,使得制动装置103下方的环形加载板105和弧形压 头5不会随着加载装置1发生转动,即加载装置1驱动环形加载板105上下 移动的时候,环形加载板105不做旋转运动,实现竖向加载;2、扭剪加载 模式,在该模式下加载时,松开制动装置103,使得制动装置103下方的环 形加载板105和弧形压头5会随着加载装置1发生转动,即加载装置1驱动 环形加载板105上下移动的时候,环形加载板105做旋转运动,实现扭剪加 载;3、环向移动加载模式,该模式下环形加载板105不做竖向的位移,通 过向下调整弧形压头5的位移,使得颗粒试样203产生挤压,并用摄像装置 8记录颗粒试样203的应力图像。
40.在该实施方式中,为了进一步提供一种加载装置1,以便于实验操作, 所述加载装置1包括:手动加载手柄101、手动加载模组102和所述制动装 置103,所述手动加载手柄101螺旋贯穿所述手动加载模组102后通过所述 制动装置103与所述轴体连接。手动加载手柄101的作用是通过旋转操作环 形加载板105的升降,手动加载手柄101中设置有主轴,主轴与手动加载模 组102之间采用螺纹配合。制动装置103如侧面设置有刹车机构的结构,刹 车机构的内端设置有与轴体侧面接触的刹车片,当制动装置103锁定后,刹 车片远离轴体侧面,轴体可以自由转动,当制动装置103打开后,刹车片挤 压在轴体侧面对轴体实现刹车,使得轴体跟随手动加载手柄101转动,刹车 片的驱动可以采用气动方式也可以采用手动方式,手动方式如:在制动装置 103的侧面设置手动阀,手动阀与刹车片之间采用螺杆连接,螺杆与制动装 置103之间螺纹连接,通过旋转手动阀将刹车片朝向轴体侧面挤压或松开。 当然,手动阀的转动也可以采用减速电机驱动。
41.在该实施方式中,为了进一步提供一种弧形压头5的高度调节方式,所 述环形加载板105上沿周向方向设置有多个通孔,所述通孔内安装有螺母 502;与所述螺母502相配合的螺栓501贯穿所述螺母502设置并活动连接 于相应的所述弧形压头5;所述弧形压头5上设置有至少两个导向杆503, 所述环形加载板105上设置有与所述导向杆503对应的导向孔。使用时,通 过转动螺栓501,同时通过导向杆503的导向实现弧形压头5的竖向移动。
42.在该实施方式中,为了进一步提供一种测量弧形压头5的位移方式,在 每个所述螺栓501的一侧均设置有用于测量相应所述螺栓501位移量的位移 计106。位移计106的测量端设置在螺栓501的顶端,当螺栓501移动后位 移计106即可有相应的读数,该位移量即为弧形压头5的位移量,位移计106 可以安装在其他架体结构上予以固定。
43.在该实施方式中,所述位移计106为百分表或红外测距仪。
44.在该实施方式中,为了进一步提供一种无边界颗粒扭剪加载空心圆筒光 弹实验装置的承载结构,所述无边界颗粒扭剪加载空心圆筒光弹实验装置还 包括:承载装置4;其中,所述承载装置4包括顺次连接的底座、支架和悬 架,所述加载装置1安装于所述悬架上,所述光源7安装于所述底座上,所 述透明环形加载筒2夹持固定于所述底座上。支架上安装有加载力学数值显 示器3,加载力学数值显示器3与压扭复合力传感器104连接用于显示压力 值。
45.在该实施方式中,为了进一步提供一种透明环形加载筒2的固定结构, 所述底座上设置有用于夹持所述透明环形加载筒2的固定装置6。固定装置 6如左右对称设置的夹
具,夹具可以通过螺钉可拆卸地安装在底座上。
46.在该实施方式中,所述摄像装置8设置有3-6个,且呈周向分布于所述 透明环形加载筒2的周围。如图4所示摄像装置8呈正三角分布设置有3个, 摄像装置8如摄像机。
47.本发明还提供了一种光弹实验装置的使用方法,该使用方法使用所述无 边界颗粒扭剪加载空心圆筒光弹实验装置,所述使用方法包括以下步骤:
48.1)将颗粒试样203放入透明环形加载筒2的内部;
49.2)锁紧或打开制动装置103;
50.3)操作加载装置1使得弧形压头5与颗粒试样203接触;
51.4)通过加载装置1或单独调节弧形压头5的高度对颗粒试样203进行 加载;
52.5)记录弧形压头5在不同位移量时压扭复合力传感器104的力学数值, 同时通过摄像装置8记录颗粒试样203的应力图像;
53.6)通过计算机9对步骤5)中所记录的数值以及应力图像进行分析。
54.通过上述技术方案的实施,可以实现无水状态的加载模式,如:
55.a、在无水状态下的竖向加载模式:
56.1)将颗粒试样203放入透明环形加载筒2的内部;
57.2)锁紧制动装置103;
58.3)操作加载装置1使得弧形压头5与颗粒试样203接触;
59.4)通过加载装置1调节弧形压头5的高度对颗粒试样203进行加载;
60.5)记录弧形压头5在不同位移量时压扭复合力传感器104的力学数值, 同时通过摄像装置8记录颗粒试样203的应力图像;
61.6)通过计算机9对步骤5)中所记录的数值以及应力图像进行分析。
62.b、在无水状态下的扭剪加载模式:
63.1)将颗粒试样203放入透明环形加载筒2的内部;
64.2)打开制动装置103;
65.3)操作加载装置1使得弧形压头5与颗粒试样203接触;
66.4)通过加载装置1调节弧形压头5的高度对颗粒试样203进行加载;
67.5)记录弧形压头5在不同位移量时压扭复合力传感器104的力学数值, 同时通过摄像装置8记录颗粒试样203的应力图像;
68.6)通过计算机9对步骤5)中所记录的数值以及应力图像进行分析。
69.c、在无水状态下的环向移动加载模式:
70.1)将颗粒试样203放入透明环形加载筒2的内部;
71.2)锁紧或打开制动装置103;
72.3)操作加载装置1使得弧形压头5与颗粒试样203接触;
73.4)通过单独调节弧形压头5的高度对颗粒试样203进行加载;
74.5)记录弧形压头5在不同位移量时压扭复合力传感器104的力学数值, 同时通过摄像装置8记录颗粒试样203的应力图像;
75.6)通过计算机9对步骤5)中所记录的数值以及应力图像进行分析。 可选地,在步骤1)之前将密封圈10安装在多个所述弧形压头5的下方; 在步骤3)和步骤4)之间还包括以下步骤:打开进水接口12和出水接口13 的止水阀并向所述透明环形加载筒2内加水,直到
出水接口13处有水流出 时关闭进水接口12和出水接口13的止水阀,再通过所述加压装置11向所 述透明环形加载筒2内加压至所需要的压强。
76.通过上述技术方案的实施,可以实现有水状态的加载模式,有水状态的 加载模式包括:在有水状态下的扭剪加载模式、在有水状态下的扭剪加载模 式和在有水状态下的环向移动加载模式,这三种模式与无水状态的加载模式 步骤相同,不同的是,在步骤1)之前将密封圈10安装在多个所述弧形压头 5的下方,密封圈10的安装可以采用卡扣连接的方式,如在密封圈10的上 表面设置凸起,在弧形压头的下表面设置相应的卡槽;在步骤3)和步骤4) 之间还包括以下步骤:打开进水接口12和出水接口13的止水阀并向所述透 明环形加载筒2内加水,直到出水接口13处有水流出时关闭进水接口12和 出水接口13的止水阀,再通过所述加压装置11向所述透明环形加载筒2内 加压至所需要的压强。
77.以上结合附图详细描述了本发明的优选实施方式,但是,本发明并不限 于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明 的技术方案进行多种简单变型,这些简单变型均属于本发明的保护范围。
78.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特 征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必 要的重复,本发明对各种可能的组合方式不再另行说明。
79.此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其 不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1