GNSS双天线辅助陀螺的地震旋转测量系统及方法
gnss双天线辅助陀螺的地震旋转测量系统及方法
技术领域
1.本发明涉及地震监测技术领域,尤其涉及一种gnss双天线辅助陀螺的地震旋转测量系统和方法。
背景技术:
2.地震旋转分量是描述地震运动的必要观测量,对震源物理机制、地震波传播特性和浅层地壳结构等研究都具有重要价值。但由于缺乏精密可靠的地震旋转测量,相关研究仅停留在理论上,亟需一种地震旋转测量系统及方法以提供宽频带高精度的地震旋转量。
3.然而,由于同震地面运动持续时间短且多数时段幅度较低,在进行地震旋转量观测时,其绕垂直向的扭转角是弱可观测的,陀螺仪的基线误差将使得扭转角出现较大幅度(》0.1度)的漂移,阻碍了完整准确的地震旋转量的恢复。因此,如何约束同震观测中的扭转角漂移是地震旋转测量系统必须克服的难题。
技术实现要素:
4.本发明提供一种gnss双天线辅助陀螺的地震旋转测量系统及方法,系统集成gnss双天线测量单元、陀螺仪和地震旋转量数据处理模块,基于gnss双天线定向约束陀螺仪基线漂移误差的方法,可获得无基线漂移系统误差、可靠且高精度的宽频带地震旋转量。
5.根据实施例的第一方面,提供一种gnss双天线辅助陀螺的地震旋转测量系统,包括:
6.gnss双天线测量单元,其包括双天线gnss接收机板卡和gnss双天线,用于同步采集双天线gnss观测值;
7.陀螺仪,其安装在水平地震观测台上与gnss双天线固接,并对准地理坐标系实时采集xyz三轴角速度,其中gnss双天线的基线方向对齐于陀螺仪的x轴方向;以及
8.地震旋转量数据处理模块,包括:
9.gnss双天线定向模块,根据双天线gnss观测值确定gnss双天线扭转角;和
10.地震旋转量融合处理模块,对gnss双天线扭转角和陀螺仪角速度观测值进行融合估计,获得地震旋转量。
11.根据本发明实施例第二方面,提供一种gnss双天线辅助陀螺的地震旋转测量方法,包括:
12.gnss双天线测量单元同步采集双天线gnss观测值;
13.采用对准地理坐标系的陀螺仪实时采集三轴角速度观测值,且由gnss进行gps授时;
14.根据双天线gnss观测值确定gnss双天线扭转角;
15.对gnss双天线扭转角和陀螺仪角速度观测值进行融合估计,获得无基线漂移误差的宽频带地震旋转量。
16.在上述第一方面和第二方面中,gnss双天线扭转角的获得方法包括:
17.接收gnss观测值数据,进行gnss观测值数据的粗差剔除和周跳探测的预处理;
18.根据gnss双天线相位中心偏差和变化模型进行gnss双天线相位中心偏差和变化校正;
19.根据多路径模型对gnss双天线多路径误差进行改正;
20.将改正的观测值组成gnss双天线双差分相对定位观测模型,进行基于基线长度约束的模糊度固定,获得模糊度固定基线向量;
21.基于基线向量构建姿态观测模型,再利用最小二乘原理实现姿态参数的迭代估计,获取基于基线向量的gnss双天线定向结果和精度;
22.对定向结果进行低通滤波,获得低频gnss双天线扭转角。
23.在上述第一方面和第二方面中,对gnss双天线扭转角和陀螺仪角速度观测值进行融合估计获得地震旋转的方法包括:
24.对准地理坐标系的陀螺仪实时采集三轴角速度观测值,且由gnss进行gps授时;
25.根据陀螺仪三轴角速度观测值进行震动状态判断,根据震前静止状态下陀螺仪的三轴角速度观测数据进行三轴零偏估计;
26.根据震前静止条件对陀螺仪三轴角速度观测数据进行零角速度约束和初始姿态约束;
27.进行陀螺仪三轴姿态角度估计,具体包括:判断到震动时利用三轴零偏估计对震动时的角速度观测数据进行静态零偏校正,基于初始姿态和零偏校正之后的陀螺仪三轴角速度观测数据进行状态更新,获得陀螺仪的三轴姿态角度;
28.进行地震旋转量融合估计,具体包括:gnss双天线定向和陀螺仪观测的时间对齐,在gnss和陀螺仪同步观测时刻进行测量更新,实时估计出地震旋转量和残余陀螺仪零漂,并将其回代到陀螺仪三轴姿态角度估计步骤中,对姿态和零漂进行修正,进行下一历元的姿态角度估计。
29.本发明的gnss双天线辅助陀螺的地震旋转测量系统和方法,充分利用了gnss双天线定向无姿态漂移误差且不受重力影响的优势,对陀螺仪基线漂移误差进行约束,实现高采样率gnss和陀螺仪观测量的有效融合,因此能提供无基线漂移系统误差、可靠且高精度的宽频带地震旋转运动观测量。
附图说明
30.为了更清楚地说明本发明实施例的技术方案,下面将对实施例的附图作简单地介绍。
31.图1为一种gnss双天线辅助陀螺的地震旋转测量系统结构示意图。
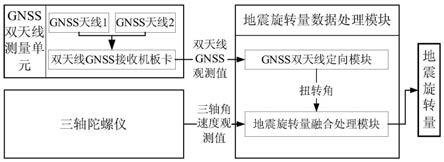
32.图2为一种gnss双天线辅助陀螺的地震旋转测量系统构架图。
33.图3为一种gnss双天线辅助陀螺的地震旋转测量方法数据处理流程图。
具体实施方式
34.图1、图2示出了一种gnss双天线辅助陀螺的地震旋转测量系统,该系统包括gnss双天线测量单元、陀螺仪4和地震旋转量数据处理模块7。所述系统具备gnss双天线定向,并对陀螺仪基线漂移误差进行约束,实现高采样率gnss和陀螺仪观测量的有效融合,输出无
基线漂移系统误差、可靠且高精度的宽频带地震旋转量的能力。
35.所述gnss双天线测量单元包括双天线gnss接收机板卡6和采用刚性连接杆3固定的gnss双天线1、2,用于同步采集双天线gnss观测值。
36.陀螺仪4为安装在水平地震观测台5的三个正交陀螺仪4,用于采集三个方向的角速度;三轴所组成的仪器坐标系对准地理坐标系(enu坐标系),即x轴指向东,y轴指向北,z轴指向天顶方向;该陀螺仪4与gnss双天线1、2刚体固接,且gnss双天线1、2基线方向对齐于陀螺仪4x轴方向。
37.地震旋转量数据处理模块7包括gnss双天线定向模块和地震旋转量融合处理模块。其中,所述gnss双天线定向模块根据双天线gnss观测值确定地震观测台5沿垂向的旋转量(扭转角)。所述地震旋转量融合估计模块对gnss双天线扭转角和陀螺仪角速度观测值进行融合估计,获得无基线漂移等系统误差、且在低频段可靠与可信的宽频带地震旋转量。
38.首先,所述gnss双天线测量单元中的双天线gnss接收机板卡6同步接收gnss双天线1、2的gnss高采样率观测值数据,并将其输出到地震旋转量数据处理模块7中的gnss双天线定向模块中,进行数据预处理、天线相位中心改正、多路径误差改正、基于基线约束的相对定位模糊度固定解算、基于固定解的基线向量进行双天线扭转角解算,以及进行低通滤波,输出去噪之后的gnss双天线扭转角。
39.与此同时,对准地理坐标系(enu坐标系)的三轴陀螺仪4实时采集三轴角速度观测值,并将其输出到地震旋转量数据处理模块中7的所述地震旋转量融合处理模块中,进行静态判断、零偏估计和改正,以及进行三轴姿态角度的状态更新,并于gnss定向观测对齐时刻和gnss双天线扭转角进行融合测量更新,获得基于双天线gnss约束的地震旋转量融合解,并将估计的地震旋转量输出。
40.下面结合图3对所述gnss双天线定向模块和所述地震旋转量融合处理模块的处理流程进行详细说明。
41.s1:进行gnss原始观测数据的粗差剔除和周跳探测等gnss数据预处理,确保gnss观测数据质量。
42.s2:根据gnss双天线相位中心偏差(pco)和变化(pcv)模型进行gnss天线相位中心偏差和变化校正,确保双天线空间同步精度。
43.s3:多路径误差补偿;
44.s31、针对北斗、gps、galileo等计算不同的卫星轨道重复周期,采用恒星日滤波方法补偿单天线多路径误差;
45.s32、获取相对定位双差分处理后的载波相位残差,对恒星日滤波多路径模型进行更新;
46.s33、根据近距离双天线之间的多路径相关性和台站环境,建立和更新双天线多路径相关性模型及其误差随机模型,抑制多路径误差对双天线定向的影响。
47.s4:相对定位模糊度固定解算;
48.s41:联立上述误差改正之后的gnss双天线双差伪距观测值、双差相位观测值和基线长度虚拟观测值,建立gnss双天线双差分相对定位观测模型,估计浮点解;
49.s42:使用lambda方法进行整数模糊度搜索,并组成整数模糊度候选集;由于增加了基线长度观测量,一定程度上提高了浮点解精度,并降低了其相关性,模糊度搜索效率得
到了提高;
50.s43:进行最优整数模糊度集确定,首先基于基线长度对整数模糊度候选集进行筛选,剔除候选集中模糊度计算的基线长度与真实基线长度之间差大于阈值的模糊度,然后通过ratio检验对剩余的整数模糊度进行验证,快速获得最优整数模糊度集。
51.s5:gnss双天线定向解算;
52.s51:基于模糊度固定解,构建基于基线向量的姿态观测模型;
53.s52:利用最小二乘原理实现扭转角姿态参数的迭代估计,获取基于基线向量的gnss双天线定向结果和精度。
54.s6:对gnss双天线定向输出的扭转角进行低通滤波,降低高频噪声影响,获得低频gnss双天线扭转角。
55.s7:陀螺仪三轴零偏估计;
56.s71:对准地理坐标系(enu坐标系)的三轴陀螺仪实时采集三轴角速度观测值,且由gnss进行gps授时;
57.s72:根据三轴角速度观测值进行震动状态判断,根据静止状态下陀螺仪的三轴角速度观测数据进行三轴零偏估计;
58.s73:根据震前静止条件对陀螺仪三轴角速度观测值进行零角速度约束和初始姿态约束。
59.s8:陀螺仪三轴姿态角度估计;
60.s81:根据震动状态判断结果,对震动时的角速度观测数据进行静态零偏校正;
61.s82:基于初始姿态和零偏校正之后的陀螺仪三轴角速度观测数据进行状态更新,获得陀螺仪的三轴姿态角度,构建的状态方程为:
[0062][0063]
式中ψ,θ,分别为偏航角、俯仰角和横滚角;为陀螺仪零漂在地理坐标系(n系)沿偏航角ψ的分量,是静态零偏校正之后残余的基线零漂误差,被作为随机游走进行估计;τ为采样时间间隔;为k时刻陀螺仪载体坐标系(b系)转n系的旋转矩阵,在b系对齐到n系时,该矩阵为单位阵,当地震动产生旋转导致两个坐标系不再对齐时需要实时更新时,该矩阵为单位阵,当地震动产生旋转导致两个坐标系不再对齐时需要实时更新和分别是陀螺仪在b系沿三个轴测量的角速度观测值;w为系统噪声向量,服从wk~n(0,qk),qk为过程噪声方差阵。
[0064]
s9:地震旋转量融合估计;
[0065]
s91:判断gnss双天线定向和陀螺仪观测的时间是否对齐,确保融合的时空基准统一;
[0066]
s92:构建低频gnss双天线扭转角和陀螺仪角速度组合观测方程:
[0067][0068]
式中ψ
gnss
为低频gnss双天线扭转角,为低频gnss双天线扭转角测量噪声,服从r为低频gnss双天线扭转角的误差方差。
[0069]
s93:基于上述状态方程和观测方程,即建立的低频gnss双天线扭转角和陀螺仪融合估计地震旋转角的组合模型,由卡尔曼滤波实时估计地震旋转量和残余陀螺仪零漂(在n系沿偏航角ψ的分量)。
[0070]
s94:将估计的地震旋转量和陀螺仪零漂回代陀螺仪三轴姿态角度估计模块中,对姿态和零漂进行修正,进行下一历元的姿态角度估计。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1