基于最小方差无失真响应的信源波达估计方法及系统
1.本发明属于阵列信号处理技术领域,特别涉及一种基于最小方差无失真响应的信源波达估计方法及系统。
背景技术:
2.波达方向(direction of arrival,doa)估计是阵列信号处理的一个重要分支,被广泛用于雷达、声呐、探测以及医学工程等领域。确定波达方向的步骤:接收天线阵列在一定范围角度内进行波束扫描,然后计算每个角度接收到的信号功率,最后信号功率最大对应的角度被确定为信源波达方向。在众多自适应波达方向估计算法中,最小方差无失真响应(mini mum variance distortionless response,mvdr)算法是最具代表性的一类,它的性能良好,实现简单,但是标准的mvdr算法需要进行矩阵求逆操作,直接矩阵求逆操作需要o(m3)次操作数,其中m是传感器阵列天线数量。当阵列天线数量比较大时,复杂度非常高,非常不适用于硬件实施。因此,如何降低mvdr求逆操作的复杂度这一个问题,是一个挑战。
3.近几年来许多学者提出了多种自适应波达方向估计算法,用于降低mvdr算法求逆的复杂度。例如,最小均方(least mean square,lms)算法来实现mvdr,其运算复杂度为o(m)。但是,lms的收敛速度很慢。递归最小二乘(recursive least square,rls)算法实现mvdr时,可以在收敛速度和复杂度之间提供一个较好的折中。许多研究人员致力于将mvdr问题转换为rls最小化问题。但是rls算法初值正则化时会呈指数型快速衰减,对角线加载技术在矩阵对角线元素上添加一个合适数值可以增强rls算法鲁棒性,但是这个额外的正则化操作使得在每次矩阵求逆操作需要o(m3)个操作数,导致实际可操作性不强。
技术实现要素:
4.为此,本发明提供一种基于最小方差无失真响应的信源波达估计方法及系统,操作简单,复杂度低,估计性能良好,便于实际场景应用。
5.按照本发明所提供的设计方案,一种基于最小方差无失真响应的信源波达估计方法,包含如下内容:
6.建立信源波达估计模型,该信源波达估计模型通过传感器天线阵列在一定角度范围离散扫描获得扫描导向矢量,结合接收到的信息,计算每个角度的天线阵列输出功率来估计信源波达方向;
7.根据最小方差无失真响应准则,将信源波达估计模型转换为约束的最小化问题,约束的最小化问题具体为:调整传感器天线权重将信源波达角的输出功率增益最大,抑制其他干扰角度的输出功率增益;
8.约束的最小化问题求解中,以递归最小二乘法为框架,通过二分坐标下降方法来计算每个角度的天线阵列输出功率中快拍协方差矩阵的逆矩阵和扫描导向矢量的乘积,获取各角度波达信号天线阵列输出功率;
9.针对计算得到的各角度波达信号天线阵列输出功率,利用输出功率谱峰值来估计
信源波达方向。
10.作为本发明基于最小方差无失真响应的信源波达估计方法,进一步地,信源波达估计模型中,利用传感器天线接收阵列在预设区域范围内进行波束扫描,计算每个扫描角度的天线阵列输出功率,将最大输出功率对应的角度确定为信源波达方向。
11.作为本发明基于最小方差无失真响应的信源波达估计方法,进一步地,传感器天线接收阵列进行波束扫描中,假设在q个快拍的观察周期内接收到n个窄带信号,则利用导向矢量矩阵a(θn)来表示第i个快拍时传感器天线接收阵列对具有单位能量窄带信源的响应,其中,i∈{1,2,3,
…
,q}。
12.作为本发明基于最小方差无失真响应的信源波达估计方法,进一步地,第i个快拍时传感器天线接收阵列的观察信号表示为:r(i)=a(θn)
·
s(i)+n(i),其中,a(θn)表示导向矢量矩阵,且a(θn)=[a0(θ1),a0(θ2),...,a0(θn)],a0(θn)表示第n个信源角度θn的导向矢量,s(i)表示第i个快拍时刻多个信源发送的一组不相关的波达信号,n(i)表示高斯随机向量噪声。
[0013]
作为本发明基于最小方差无失真响应的信源波达估计方法,进一步地,对于第n个信源角度θn,约束的最小化问题表示为:且满足wh(i)a(θn)=1,其中,r(i)为m
×
m维快拍协方差矩阵,且w(i)为m
×
1维的复数权重向量,k为训练快拍数量,a(θn)表示导向矢量矩阵,r(k)表示天线接收阵列观察信号。
[0014]
作为本发明基于最小方差无失真响应的信源波达估计方法,进一步地,在对约束的最小化问题进行求解中,假定扫描导向矢量as(θ
p
)在波达方向估计期间稳定不变,p=1,2,...,p,p为扫描步数,则每个扫描角度θ
p
的输出功率表示为其中,v
θ
(i)=r-1
(i)as(θ
p
)。
[0015]
作为本发明基于最小方差无失真响应的信源波达估计方法,进一步地,输出功率计算过程中,对快拍协方差矩阵r(i)利用对角线矩阵μi进行正则化处理,得到对角线加载快拍协方差矩阵,其中,正则化处理过程表示为:第i个快拍的协方差矩阵r(i)表示为r(i)=ηr(i-1)+r(i)rh(i)+(1-η)μi;利用二分坐标下降方法来计算快拍协方差矩阵的逆矩阵和扫描导向矢量的乘积,通过设定遗忘因子η为1-2-ω
,采用遗忘因子η的加法和移位操作对协方差矩阵r(i)进行更新,其中,μ为对角线加载因子,i为单位矩阵,r(i)为天线接收阵列观察信号,ω为正整数。
[0016]
进一步地,本发明还提供一种基于最小方差无失真响应的信源波达估计系统,包含:模型构建模块、模型转化模块、模型求解模块及信号处理模块,其中,
[0017]
模型构建模块,用于建立信源波达估计模型,通过计算每个扫描角度的传感器天线阵列输出功率来判断信源波达方向;
[0018]
模型转化模块,用于根据最小方差无失真响应准则,将信源波达估计模型转换为约束的最小化问题,约束的最小化问题具体为:调整传感器天线权重将信源波达角的输出功率增益最大,抑制其他干扰角度的输出功率增益;
[0019]
模型求解模块,用于在约束的最小问题求解中,以递归最小二乘法为框架,通过二分坐标下降方法来计算每个角度的天线阵列输出功率中快拍协方差矩阵的逆矩阵和扫描
导向矢量的乘积,获取各角度波达信号天线阵列输出功率;
[0020]
信号处理模块,用于针对计算得到的各角度波达信号天线阵列输出功率,利用输出功率谱峰值来估计信源波达方向。
[0021]
本发明的有益效果:
[0022]
本发明基于最小方差无失真响应准则,以递归最小二乘法为框架,计算天线阵列接收的各角度波达信号输出功率,其中,输出功率计算中快拍协方差矩阵的逆矩阵和扫描导向矢量的乘积采用二分坐标下降方法来计算,在降低波达方向估计过程中的计算复杂度的同时,能够提供更好的doa估计分辨率,估计性能良好,且操作简单,便于实现,具有较好的应用前景。
附图说明:
[0023]
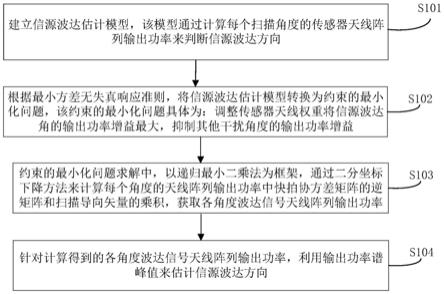
图1为实施例中基于最小方差无失真响应的信源波达估计流程示意;
[0024]
图2为实施例中真实波达角为29
°
时对比算法在不同信噪比时随快拍变化的rmse性能示意;
[0025]
图3为实施例中不同信噪比下对比算法随着快拍增加得到的波达角rmse示意,真实波达角为29.9
°
;
[0026]
图4为实施例中对比算法随信噪比变化的rmse性能示意,真实波达角为29
°
和29.9
°
;
[0027]
图5为实施例中不同扫描步长时ledcd-rls-dl算法对波达角的估计性能示意,真实波达角为37.5
°
;
[0028]
图6为实施例中基于ledcd算法的doa估计框图示意;
[0029]
图7为实施例中信噪比为10db时真实波达角为5
°
和25.3
°
下定点型doa估计性能示意。
具体实施方式:
[0030]
为使本发明的目的、技术方案和优点更加清楚、明白,下面结合附图和技术方案对本发明作进一步详细的说明。
[0031]
本发明实施例,提供一种基于最小方差无失真响应的信源波达估计方法,参见图1所示,包含如下内容:
[0032]
s101、建立信源波达估计模型,该模型通过计算每个扫描角度的传感器天线阵列输出功率来判断信源波达方向;
[0033]
s102、根据最小方差无失真响应准则,将信源波达估计模型转换为约束的最小化问题,该约束的最小化问题具体为:调整传感器天线权重将信源波达角的输出功率增益最大,抑制其他干扰角度的输出功率增益;
[0034]
s103、约束的最小化问题求解中,以递归最小二乘法为框架,通过二分坐标下降方法来计算每个角度的天线阵列输出功率中快拍协方差矩阵的逆矩阵和扫描导向矢量的乘积,获取各角度波达信号天线阵列输出功率;
[0035]
s104、针对计算得到的各角度波达信号天线阵列输出功率,利用输出功率谱峰值来估计信源波达方向。
[0036]
二分坐标下降(dichotomous coordinate descent,dcd)算法具有低复杂度且能保持数值稳定。这是因为dcd算法在解决线性方程构建的系统问题时不需要乘法和除法操作,仅需要加法和移位操作。rls问题可被表示为一组辅助正则方程,并由dcd迭代近似求解这组方程。本案实施例中,基于最小方差无失真响应准则,以递归最小二乘法为框架,通过二分坐标下降算法计算天线阵列接收的各角度波达信号输出功率中的协方差矩阵的逆与扫描导向矢量的乘积,解决现有波达方向估计中因阵列天线数量大而引起的复杂度高、不适于硬件实施及实际可操作性不强等情形。
[0037]
作为本发明实施例中基于最小方差无失真响应的信源波达估计方法,进一步地,信源波达估计模型中,利用传感器天线接收阵列在预设区域范围内进行波束扫描,计算每个扫描角度的天线阵列输出功率,将最大输出功率对应的角度确定为信源波达方向。
[0038]
假设有n个远场信号源s1,s2,...,sn发送信息到由m个传感器天线组成的均匀线性阵列,波达方向为:
[0039]
z=[θ1,θ2,θ3,...,θn],
ꢀꢀꢀ
(1)
[0040]
其中θn表示与第n个信源的角度。在采样时间t传感器天线阵列接收到的信号x表示为
[0041][0042]
其中s(t)是一组不相关的波达信号。a0(θn)是第n个信源角度的m
×
1维导向矢量,它表示为a0(θn)=[1,e
τ
,e
2τ
,...,e
(m-1)τ
],τ=jγd sin(θ),γ=2π/λ,λ为波长,d为传感器天线之间的距离。一个m
×
1维的信号向量x(t)也可以写成:
[0043]
x(t)=a(θn)
·
s(t),
ꢀꢀꢀ
(3)
[0044]
其中a(θn)=[a0(θ1),a0(θ2),...,a0(θn)]是m
×
n维阵列导向矢量矩阵。信号向量加上噪声被称为快拍。假设在q个快拍观察周期内接收到n个窄带信号。在收到第i(i∈{1,2,3,...,q}个快拍时,天线阵列的观察信号是
[0045]
r(i)=a(θn)
·
s(i)+n(i),
ꢀꢀꢀ
(4)
[0046]
其中r(i)是m
×
1维向量,n(i)是方差为σ2的m
×
1维的零均值复数高斯随机向量噪声。
[0047]
根据mvdr准则,传感器天线接收阵列通过计算所有可能方向上的接收信号功率来估计波达方向。在数学上,mvdr-doa估计方法可以表述为约束的最小化问题,即传感器天线阵列通过调整天线权重将信源波达角的输出功率增益最大,并使得其他干扰角度的输出功率增益最小。传感器天线阵列接收的加权信号f(i)表示为:
[0048]
f(i)=wh(i)r(i),
ꢀꢀꢀ
(5)
[0049]
其中w(i)是一个m
×
1维的复数权重向量。对于每个可能的信源角度θn,按照mvdr准则,需要满足
[0050][0051]
其中
[0052][0053]
为m
×
m维快拍协方差矩阵,k为训练快拍数量。权重向量w(i)表示为:
[0054][0055]
式中as(θ
p
)(p=1,2,...,p)是m
×
1维的扫描导向矢量,p是扫描步数。
[0056]
每个扫描角度θ
p
的输出功率为
[0057][0058]
通过计算输出功率谱峰值可以获得doa估计值,即
[0059][0060]
假设已知信源信号对应的导向矢量,基于mvdr准则的doa估计器比传统不依靠导向数据的doa估计器具有更好的分辨率和更显著的干扰抑制能力。然而,协方差矩阵r求逆的操作在运算量上是比较高的。本案实施例中,可不直接计算矩阵的逆,而是通过求解协方差矩阵的逆与扫描导向矢量的乘积,避免硬件实现中高额的计算负担。其中,对于第i个快拍,基于指数加权的rls算法来实现mvdr方案可以总结为:
[0061]
(1)更新增益矢量
[0062]
(2)更新权系数其中εn是一个加强约束的增益系数,
[0063]
(3)通过r-1
(i)=η-1
r-1
(i-1)-η-1
g(i)rh(i)r-1
(i-1)更新逆矩阵。
[0064]
总之,传统rls算法,应用矩阵求逆引理,通过第(i-1)个快拍的逆矩阵r-1
(i-1)可以计算逆矩阵r-1
(i):
[0065][0066]
其中η是遗忘因子(0<η≤1)。然而,rls矩阵求逆操作是以增加运算复杂度为代价的,即每个快拍执行o(m2)个操作数。
[0067]
递归矩阵求逆操作是导致大多数已知rls自适应滤波算法的复杂性和不稳定性的根源。如果不直接计算复数矩阵r的逆矩阵,公式(9)可以表示为
[0068][0069]
其中v
θ
(i)=r-1
(i)as(θ
p
),假设as(θ
p
)在估计波达方向期间是稳定不变的。
[0070]
式r(i)v
θ
(i)=as(θ
p
)可以表示为:
[0071]
r(i)[v
θ
(i-1)+δv
θ
(i)]=as(θ
p
),
ꢀꢀꢀ
(13)
[0072]
式(13)也可以改写为
[0073][0074]as
(θ
p
;i)是第i个快拍的扫描导向矢量,λ
sr
(i-1)=as(θ
p
;i-1)-r(i-1)v
θ
(i-1)。增量δr(i),δas(θ
p
;i),和δv
θ
(i)分别表示为
[0075][0076]
为了提高算法鲁棒性,在快拍协方差矩阵加上对角线矩阵μi进行正则化处理得到对角线加载指数快拍协方差矩阵:
[0077][0078]
其中μ是对角线加载因子(μ是个小的常数),i是单位矩阵。则式(16)可以修改为
[0079]
r(i)=ηr(i-1)+r(i)rh(i)+(1-η)μi,
ꢀꢀꢀ
(17)
[0080]
通过式(15),(17)和δas(θ
p
;i)=0,可以得到
[0081]
δr(i)=(η-1)r(i-1)+r(i)rh(i)+(1-η)μi,
ꢀꢀꢀ
(18)
[0082]
式(18)两边同乘以可以得到
[0083][0084]
其中将式(19)应用于式(14)中,aa(i)可表示为:
[0085][0086]
如果已知r(i)和aa(i),通过式(14)可以得到近似解δv
θ
(i)。为了避免高运算复杂度,可以采用迭代下降搜索方法—dcd来求解式(14),因为dcd类算法采用移位操作代替乘法/除法操作,非常适用于算法硬件实施。
[0087]
领先索引选择更新元素的dcd类型算法被证明可以加快收敛速度。在该算法中,“领先”索引q对应于残差向量λ
sr
中的最大元素。这种dcd类型算法称为领先元素dcd算法ledcd(leading element dcd)算法。表1描述了ledcd算法的工作步骤。ledcd算法可以有效地求解表2中第4步中的δv
θ
(i)。向量δv
θ
的每个元素由b
max
位表示。参数h是可变步长ζ的初始化数值,每次更新时,步长ζ除以2。ledcd算法更新δv
θ
和λ
sr
中的第q个元素,最多只能执行u
max
次。如果的绝对值足够小,则算法不更新。如果的绝对值足够大,算法更新解和向量λ
sr
。如果表1中的比较操作(步骤
③
)总是被满足,考虑运算量的因素,可以预设定更新次数u
max
(步骤
⑥
)来停止算法。停止算法的另一个参数是b
max
,这个参数可以控制步长更新数量(步骤
②
)。ledcd算法的单次更新需要m次移位操作,(m+2)次加法操作和1次比较操作。
[0088]
表1:ledcd算法
[0089][0090]
表2:本案实施例中对角线加载的ledcd-rls-mvdr doa估计算法(复数系统)
[0091][0092]
进一步地,基于上述方法,本发明实施例还提供一种基于最小方差无失真响应的信源波达估计系统,包含:模型构建模块、模型转化模块、模型求解模块及信号处理模块,其中,
[0093]
模型构建模块,用于建立信源波达估计模型,通过计算每个扫描角度的传感器天线阵列输出功率来判断信源波达方向;
[0094]
模型转化模块,用于根据最小方差无失真响应准则,将信源波达估计转换为约束的最小化问题,约束的最小化问题具体为:调整传感器天线权重将信源波达角的输出功率增益最大,抑制其他干扰角度的输出功率增益;
[0095]
模型求解模块,用于在约束的最小化问题求解中,以递归最小二乘法为框架,通过二分坐标下降方法来计算每个角度的天线阵列输出功率中快拍协方差矩阵的逆矩阵和扫描导向矢量的乘积,获取各角度波达信号天线阵列输出功率;
[0096]
信号处理模块,用于针对计算得到的各角度波达信号天线阵列输出功率,利用输出功率谱峰值来估计信源波达方向。
[0097]
为验证本案方案有效性,下面结合具体数据做进一步解释说明:
[0098]
算法复杂度是通过每个快拍计算所需要乘法数和加法数来衡量的。要注意的是,这些方法是用来求解复数方程组的。求解m/2
×
m/2维复数线性系统方程可以转化为求解一组m
×
m维的实数系统方程
[0099][0100]
其中r1和r2是r的实部和虚部,它们是m/2
×
m/2维实数矩阵。m/2
×
1维向量δv
θ1
和δv
θ2
是δv
θ
的实部和虚部。m/2
×
1维向量a
a1
和a
a2
是aa的实部和虚部。变换后的实数矩阵r是一个对称矩阵。因此,只需要计算矩阵r的上三角形矩阵。直接求逆法求解r-1
需要o(m3)次运算(加法和乘法),而经典rls需要o(m2)次运算。与通过递归方式求解逆矩阵的rls算法不同,ledcd-rls-mvdr算法以递归方式求解乘积r(i)δv
θ
(i)。其中,参数μ,η和as(θ
p
)在迭代过程中被假定为常数,(1-η)μ也是常数。另外,遗忘因子η设定为1-2-ω
,其中ω是一个正整数,这样就可以用加法和移位操作来代替(1-η)μ的乘法操作。在硬件实现中,移位操作比乘法操作简单得多。因此,矩阵r(i)可以这样更新:r(i)=(1-2-ω
)r(i-1)+r(i)rh(i)+2-ω
μi。该操作可以把表2中步骤1的复杂度从3m2降低到m2。表2第4步的复杂度即采用ledcd算法求解所需要的运算复杂度。伴随u
max
次更新,ledcd算法的复杂度(ψ
ledcd
)上限为2mu
max
+b
max
。然而在实际执行中,获得相同精度的矢量δv
θ
(i),ledcd算法通常需要小于u
max
的迭代次数。对角线加载技术可以提高算法的性能,然而采用该技术,会在ledcd-rls算法的基础上增加(mp+m)次乘法和m2+mp次加法。传统的rls算法采用对角加载技术需要在每次更新都引入矩阵求逆,从而导致不易操作的o(m3p)运算量。总之,mvdr-doa估计在计算一个波达角度阵列输出功率时,rls算法需要3.5m2+3.5m次乘法和2.5m
2-m次加法。ledcd-rls-mvdr算法需要m2+3m次乘法和2m2+6m-2+ψ
ledcd
次加法。ledcd-rls-mvdr-dl算法需要m2+5m次乘法和3m2+7m-2+ψ
ledcd
次加法。经过分析比较,这些算法复杂度增加从小到大的排序为:ledcd-rls《ledcd-rls-dl《rls《直接求逆。
[0101]
通过仿真实验来评估所提出的doa估计方案的性能,将本案实施例所提出的ledcd-rls-dl方法与其他算法在均方根误差(root mean square error,rmse)和信噪比(signal noise ratio,snr)进行比较,其中,直接求逆、rls、ledcd-rls、ledcd-rls-dl方法计算估计角度的rmse如下所示:
[0102][0103]
其中为第i次快拍时算法估计doa,θ
true
为信号源的真实doa。向量as(θ
p
)是从-90
°
到90
°
的角度范围内,以0.1
°
的扫描间隔获得的扫描导向矢量。p的值计算得到为1801。
[0104]
1.设均匀线性阵列阵元数量为m=16,阵元间距d为入射信号波长的1/2,ω=8,u
max
=32,b
max
=15,n=1。
[0105]
参见图2所示,当θ
true
=29
°
时,直接求逆、rls、ledcd-rls和ledcd-rls-dl四种算
法分别在snr=5db、snr=10db和snr=15db时随快拍增加的rmse性能。结果显示ledcd-rls算法的估计精度最差,直接求逆法的性能最好。随着快拍数量的增加,ledcd-rls-dl算法的rmse性能接近于直接求逆算法。
[0106]
参见图3所示,当θ
true
=29.9
°
时,直接求逆、rls、ledcd-rls和ledcd-rls-dl四种算法分别在snr=5db、snr=10db和snr=15db时随着快拍增加的rmse性能。结果显示,当snr=5db,随着快拍数量的增加,ledcd-rls算法的rmse性能与rls算法相似,ledcd-rls-dl算法的性能优于rls和ledcd-rls。由于扫描步长为0.1
°
,与图2相比,这四种算法在29.9
°
波达角估计rmse性能都低于它们对29
°
波达角估计的rmse性能。
[0107]
2、设均匀线性阵列阵元数量为m=16,阵元间距d为入射信号波长的一半,snr范围为0db~20db,k=500,ω=8,u
max
=32,b
max
=15,n=1。
[0108]
参见图4所示,直接求逆、rls、ledcd-rls和ledcd-rls-dl四种算法在θ
true
=29
°
和θ
true
=29.9
°
时随snr变化的rmse性能。结果显示,直接求逆算法、rls、ledcd-rls和ledcd-rls-dl算法的rmse性能随snr的增加而提升。ledcd-rls-dl算法的rmse性能优于ledcd-rls和rls算法,非常接近直接求逆算法。
[0109]
ledcd-rls-dl mvdr doa估计器可以以较低的运算复杂度首先得到信源波达粗略估计值。然后,以粗略doa估计值为中心设置一个小的角度范围,计算设置角度范围内可能信源角度在天线阵列的接收功率,从中选择峰值功率,得到信源doa精估计。图5显示了当θ
true
=37.5
°
时,ledcd-rls-dl mvdr doa估计算法采用不同扫描步长的波达估计效果。第1步,在-90
°
到90
°
范围内以5
°
的间隔获得扫描导向矢量as(θ
p
),结果显示大约在40
°
左右有一个明显的功率幅度峰值。第2步,设置以40
°
为中心向左和向右各5
°
作为扫描范围,扫描步长为1
°
,结果显示功率峰值大约是在38
°
。第3步,以38
°
为中心角度,扫描范围为37
°
到39
°
,扫描步长为0.1
°
。结果显示在37.5
°
有一个功率幅度峰值。这个例子表明扫描步长大小会影响doa估计精度。ledcd-rls-dl算法的doa粗估计(第1步)所需要的运算量较少,doa精估计(第2步,第3步)需要更多扫描数据提升估计精度,但同时也增加了运算复杂度。根据不同应用需求,可以采用不同方式进行doa估计。
[0110]
如图6所示,使用vhsic hardware description language(vhdl)在nexys4-ddr开发板上实现了ledcd-rls-dl mvdr doa估计器中的ledcd算法,并采用vivado进行综合,参数设置为m=16,n=1,ω=8,μ=0.1,u
max
=32。扫描导向矢量as(θ
p
)是在-60
°
到60
°
范围内,以0.1
°
为间隔扫描获得的。向量r(i)和as(θ
p
)用16位定点q15格式表示。矩阵r(i)和向量λ
sr
(i)和v
θ
(i)的实部和虚部分别由q15格式的32位表示。当snr=10db时,ledcd-rls-dl算法对θ
true
=5
°
和θ
true
=25.3
°
的定点型doa估计性能如图7中的(a)和(b)所示,结果显示其硬件定点型doa估计性能非常接近其浮点型性能。通过长时间的(107次快拍)实验,实验过程中没有观察到数值不稳定问题。表3是不同m值ledcd算法所占用的硬件资源。
[0111]
表3 ledcd的硬件资源
[0112][0113]
数据显示随着m数值的增长,ledcd的硬件占用率基本没有变化,它在不同m值下的功耗均仅为0.239毫瓦。因此,基于ledcd-rls-dl的mvdr doa估计器非常适合低功耗价格便宜的硬件实施,便于实现。
[0114]
除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对步骤、数字表达式和数值并不限制本发明的范围。
[0115]
基于上述的方法和/或系统,本发明实施例还提供一种服务器,包括:一个或多个处理器;存储装置,用于存储一个或多个程序,当所述一个或多个程序被所述一个或多个处理器执行,使得所述一个或多个处理器实现上述的方法。
[0116]
基于上述的方法和/或系统,本发明实施例还提供一种计算机可读介质,其上存储有计算机程序,其中,该程序被处理器执行时实现上述的方法。
[0117]
在这里示出和描述的所有示例中,任何具体值应被解释为仅仅是示例性的,而不是作为限制,因此,示例性实施例的其他示例可以具有不同的值。
[0118]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0119]
最后应说明的是:以上所述实施例,仅为本发明的具体实施方式,用以说明本发明的技术方案,而非对其限制,本发明的保护范围并不局限于此,尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,其依然可以对前述实施例所记载的技术方案进行修改或可轻易想到变化,或者对其中部分技术特征进行等同替换;而这些修改、变化或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的精神和范围,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1