一种室内平面图构建方法、系统、存储介质及计算设备
本发明涉及一种环境感知与房屋平面图构建,特别是关于一种室内平面图构建方法、系统、存储介质及计算设备。
背景技术:
1、构建精确的室内空间地图在室内导航、虚拟现实/增强现实、灾难营救、网络状态预测等方面有着重要的作用。人们一直致力于低成本、高精度、自动的、易于使用的房屋平面构建系统的研究。
2、目前,构建室内平面图的方法主要分为两种:一种是采用人工的方法,借助卷尺等测量工具对关键尺寸进行丈量,然后绘制室内平面图。该方法通常需要多人协作完成,效率较低且准确度不高。另外一类方法是使用专用的传感器设备,如常见的激光测距扫描仪(又称激光雷达,lidar)、深度照相机、rgb照相机等。基于激光测距扫描仪的平面图构建方法具有极高的精确度,但其价格非常昂贵,并且性能会受到光照条件的严重影响,当环境中存在迷雾、浓烟或强光照射等情况时,无法正常工作。基于照相机的方法通过图像分析提取房间深度等信息以构建平面轮廓,然而该类方法不仅同样会受到强光照射的干扰还具有隐私泄露的风险。
3、近年来,随着芯片制造业、电子、通信等领域的蓬勃发展,雷达设备由早期的军事专用逐步向民用倾斜。同时,成本缩减、体积变小、功耗降低等变化使得雷达相关的学术研究和产业化进程业愈发繁荣。被动式的脉冲无线电超宽带(ir-uwb)雷达和毫米波(mmwave)雷达等雷达设备最近成为室内测距和感知应用的热门。它们主动发射射频信号,并对反射信号进行处理,以感知附近物体的距离、速度或角度,因此可以在光线和烟雾等恶劣环境条件下在室内使用。房屋平面图构建的基本思路是在不同的空间位置(距离和角度)上“扫描”房间的每个部分,获取每一次扫描部分的相对于测量设备的角度和距离信息(即对每个部分的“成像”),并将它们组合成一个完整的平面图像。然而受硬件设计和成本的限制,现有的商用雷达的天线数量有限,多为一发一收、一发两收、两发四收等,如被动式的商用novelda x4系列ir-uwb雷达的天线仅为单发单收,不具有角度分辨力,无法获得房间不同组成部分的角度信息,因而无法获取房屋的像。
技术实现思路
1、针对上述问题,本发明的目的是提供一种室内平面图构建方法、系统、存储介质及计算设备,其具有低成本、低功耗的特点,并能进行更加准确和高效的平面图构建。
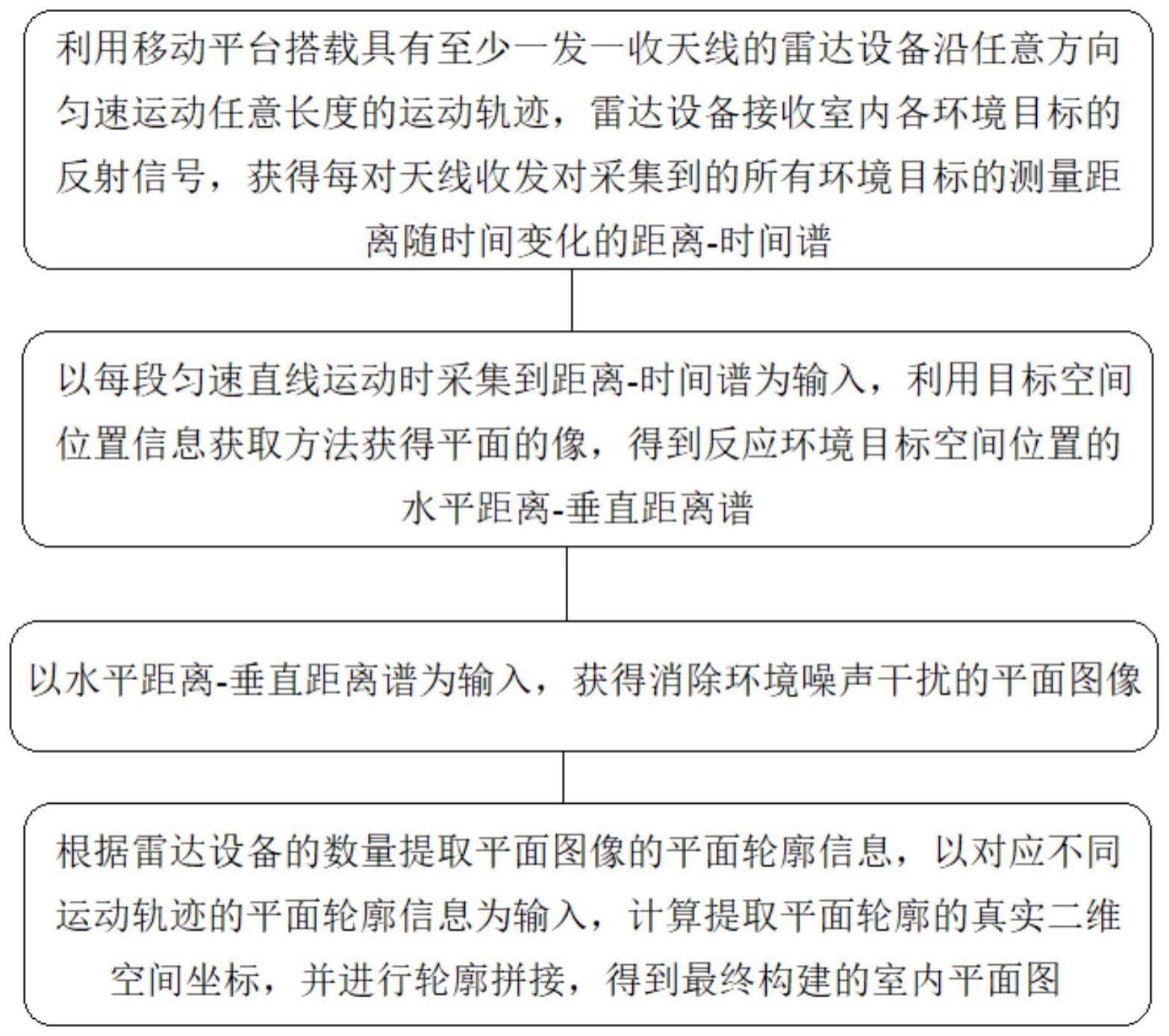
2、为实现上述目的,一方面,本发明采取的技术方案为:一种室内平面图构建方法,其包括:利用移动平台搭载具有至少一发一收天线的雷达设备沿任意方向匀速运动任意长度的运动轨迹,所述雷达设备接收室内各环境目标的反射信号,获得每对天线收发对采集到的所有环境目标的测量距离随时间变化的距离-时间谱;以每段匀速直线运动时采集到所述距离-时间谱为输入,利用目标空间位置信息获取方法获得平面的像,得到反应环境目标空间位置的水平距离-垂直距离谱;以所述水平距离-垂直距离谱为输入,获得消除环境噪声干扰的平面图像;根据所述雷达设备的数量提取所述平面图像的平面轮廓信息,以对应不同运动轨迹的所述平面轮廓信息为输入,计算提取平面轮廓的真实二维空间坐标,并进行轮廓拼接,得到最终构建的室内平面图。
3、进一步,所述匀速直线运动轨迹的获取,包括:计算所述移动平台内各轴加速度测量值的方差之和,找到预定义阈值以上的运动段;计算所述运动段的平均角速度,当所述平均角速度低于第一预设阈值时,该运动段为匀速直线运动段。
4、进一步,所述以所述水平距离-垂直距离谱为输入,获得消除环境噪声干扰的平面图像,包括:将“水平距离-垂直距离谱”的纵轴乘以一个比例因子,对图像进行基于垂直距离的能量补偿;当目标垂直距离超过预先设定的定值时,所述比例因子固定在第二预设阈值,完成能量补偿;将能量补偿后的平面图像去除干扰,去除平面图像中大于第三预设阈值的垂直距离值,并且去除平面图像中低于预设能量值的部分。
5、进一步,所述根据所述雷达设备的数量提取所述平面图像的平面轮廓信息,包括:若所述雷达设备的数量不大于1,则直接对单个所述雷达设备的所有天线对的去噪后的平面成像结果进行处理,并提取平面轮廓信息;若所述雷达设备的数量大于1,则对互补观测视角的多个所述雷达设备的平面成像结果进行信息融合,并提取其中的平面轮廓信息。
6、进一步,所述对互补观测视角的多个所述雷达设备的平面成像结果进行信息融合,包括:按照预先设定的规则,将不同视角的信息整合在一起;所述预先设定的规则为:若要求合成观察角度大于第一预设角度,则通过第二预设角度来覆盖所述合成观察角度,需满足所述第二预设角度与所述雷达设备的数量之积大于所述合成观察角度。
7、进一步,提取所述平面轮廓信息,包括:
8、采样峰值定位法,提取平面图像中每一水平距离对应的垂直距离能量峰值作为对平面轮廓的估计;
9、或,基于高斯图像模糊的轮廓提取方法:基于高斯模糊的图像平滑操作,并提取高于预设能量阈值的图像点;提取图像中每一水平距离对应的垂直距离能量峰值作为对平面轮廓的估计。
10、进一步,所述轮廓拼接,包括:以运动轨迹的二维坐标和获得的每段轨迹对应的平面轮廓信息为输入,按照时间顺序依次计算提取的每个轮廓点的二维空间坐标,连接相邻轮廓点成轮廓线,得到构建的室内平面图。
11、另一方面,本发明采取的技术方案为:一种室内平面图构建系统,其包括:距离-时间谱获取模块,利用移动平台搭载具有至少一发一收天线的雷达设备沿任意方向匀速运动任意长度的运动轨迹,所述雷达设备接收室内各环境目标的反射信号,获得每对天线收发对采集到的所有环境目标的测量距离随时间变化的距离-时间谱;水平距离-垂直距离谱获取模块,以每段匀速直线运动时采集到所述距离-时间谱为输入,利用目标空间位置信息获取方法获得平面的像,得到反应环境目标空间位置的水平距离-垂直距离谱;平面图像获取模块,以所述水平距离-垂直距离谱为输入,获得消除环境噪声干扰的平面图像;平面图构建模块,根据所述雷达设备的数量提取所述平面图像的平面轮廓信息,以对应不同运动轨迹的所述平面轮廓信息为输入,计算提取平面轮廓的真实二维空间坐标,并进行轮廓拼接,得到最终构建的室内平面图。
12、另一方面,本发明采取的技术方案为:一种存储一个或多个程序的计算机可读存储介质,所述一个或多个程序包括指令,所述指令当由计算设备执行时,使得所述计算设备执行上述方法中的任一方法。
13、另一方面,本发明采取的技术方案为:一种计算设备,其包括:一个或多个处理器、存储器及一个或多个程序,其中一个或多个程序存储在所述存储器中并被配置为所述一个或多个处理器执行,所述一个或多个程序包括用于执行上述方法中的任一方法的指令。
14、本发明由于采取以上技术方案,其具有以下优点:
15、1、本发明使用至少一个单发单收的商用低成本、低功耗的雷达设备进行室内平面图构建,构建过程无需进行预先数据采集和机器训练。
16、2、本发明考虑到民用雷达的成本和硬件制造难度的限制,针对雷达波束指向性弱、角度分辨率低的问题,为避免增加更多的天线阵列提高硬件成本和复杂度,巧妙地利用合成孔径成像的思路,让移动机器人平台搭载雷达匀速运动,在空间的不同位置上均匀采样,从而形成一个等效的虚拟天线阵列,以准确获取不同目标的角度和距离。
17、3、本发明考虑到雷达设备大多使用定向天线,且存在运动轨迹受限的可能,导致目标观测视角有限,无法充分感知到目标的问题,采用了增加互补观测视角的雷达设备的方法。相较于单个设备的有限的观测视角,多个设备能够提供更宽的合成观测视角。融合不同视角的观测信息,有利于更加准确和高效的平面图构建。
18、4、本发明室内平面图构造方法广泛不仅适用于ir-uwb雷达,对毫米波雷达及其它频段的调频连续波(fmcw)都适用,具有方便、成本低、功耗低、普适性的特点。
- 还没有人留言评论。精彩留言会获得点赞!