异步电机系统转子断条及速度传感器故障的诊断方法
1.本发明涉及故障诊断技术领域,尤其涉及一种异步电机系统转子断条及速度传感器故障的诊断方法。
背景技术:
2.异步电机作为高铁的动力核心,它的安全性和稳定性关乎着高铁的安全。异步电机的故障检测和诊断方案旨在提供对早期故障的预先警告,从而可以采取纠正措施以防止在工业环境中产生经济损失或者危险。
3.异步电机系统是一个由各个子系统相互配合的综合体,一旦其中某个部件出现故障或者配合上出现了问题都可能造成电机的失效。通过研究得知,异步电机的执行器故障可大致分为转子、轴承和定子故障,除了执行器故障之外电机还会发生传感器故障,即记录系统输出的部件发生故障。根据相关统计数据的分析,转子故障和速度传感器故障的发生概率较高。
4.目前,针对异步电机系统转子断条故障和速度传感器故障的专利和论文技术较多,主要有以下几类:
5.1、基于模型的异步电机的故障诊断方法,该方法需要对研究对象建立相对准确的的状态模型,通过模型可以从结构上了解系统以及故障发生的位置和机理,如通过基于模型的方法建立包含定子故障和转子故障机理下的鼠笼式异步电机的数学模型,具体的论文和专利文献有《一种基于观测器的异步电机故障检测方法》(申请公布号cn112087173a)提出一种基于滑模观测器的异步电机故障诊断方法,通过分析残差对故障进行诊断和隔离。
6.基于数据的异步电机的故障诊断方法,该方法通多分析电压、电流、磁通以及振动信号来确认是否发生故障以及故障的位置、损坏程度。如通过电机电流谱分析在检测和定位异常电机和机械条件方面的应用,具体的论文和专利技术有“pwm-vsi fault diagnosis for a pmsm drive based on the fuzzy logic approach”(“基于模糊逻辑方法的永磁同步电机驱动的pwm-vsi故障诊断”——ieee transactions on power electronics,2019年1月),但是该方法识别的准确率比较依赖样本数据库的准确性和完整性,也无法应对未知情形的发生,即不具有推理能力,因此在故障原因推理与分析领域具有一定局限性。
7.2、基于知识的异步电机故障诊断方法,该方法主要通过各种算法,模仿人的思维方式对故障进行在线监测和定位,如采用无监督神经网络的三相电机定子发生绕组故障的在线检测的自动方法,具体的论文和专利技术有《基于栈式自编码与轻型梯度提升机算法的笼型异步电动机定转子故障联合诊断方法》(申请公布号cn112087173a),此类方法存在诊断计算量大、建立数据库和维护数据库的成本较高的缺点。
8.综上,基于知识和数据的方法具有数据量复杂,难以分析,诊断周期长,误报率较高的缺点。相比之下,基于模型的异步电机故障诊断方法具有要求简单,准确率较高的优点。
技术实现要素:
9.本发明的目的是解决上述现有技术中存在的问题。具体的,建立具有转子断条故障和速度传感器故障的数学模型;采用坐标变换实现故障量的解耦,为减小误报率,对不同故障分别设计不同观测器,采用自适应阈值,减小故障诊断时间,提高诊断的鲁棒性。
10.为了实现上述目的,本发明提供了一种异步电机系统转子断条及速度传感器故障的诊断方法,所述异步电机系统涉及的电路拓扑结构包括异步电机、电流传感器、速度传感器、驱动模块和控制模块;
11.将所述异步电机的三相接口记为接口γk,k=a,b,c,所述驱动模块的输出点记为输出点输出点与异步电机的接口γk相连接;所述速度传感器的检测端连接在异步电机的输出端,速度传感器的输出端连接控制模块的输入端;所述电流传感器分为三相,并记为k相电流传感器mk,k=a,b,c,k相电流传感器mk的检测端连接在输出点和接口γk之间,k相电流传感器mk的输出端连接控制模块的输入端,所述控制模块的输出端连接驱动模块的输入端;
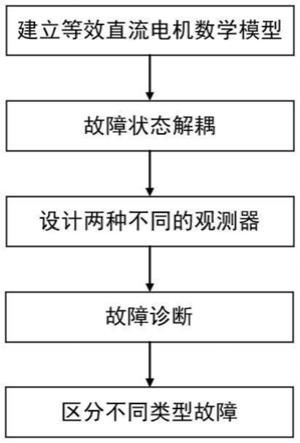
12.所述诊断方法包括以下步骤:
13.步骤1,采样及坐标变换
14.将异步电机等效为直流电机模型,采样异步电机的转速ωm,通过积分获取其机械角度
15.通过电流传感器检测驱动模块的三相输出电流并记为三相输出电流ia,ib,ic,采样驱动模块的三相输出电压并记为三相输出电压ua,ub,uc;
16.通过坐标变换将三相输出电流ia,ib,ic转换成两相输出电流αβ轴分量i
α
,i
β
,再通过park变换将两相输出电流αβ轴分量i
α
,i
β
转换成两相输出电流dq轴分量i
ds
,i
qs
;通过坐标变换将三相输出电压ua,ub,uc转换成两相输出电压αβ轴分量u
α
,u
β
,再通过park变换将两相输出电压αβ轴分量转换成两相输出电压dq轴分量u
ds
,u
qs
;
17.步骤2,建立dq坐标轴下的状态方程,其表达式为:
[0018][0019]
其中,
[0020]
x(t)为状态变量,λ
qr
为异步电机转子q轴磁通,λ
dr
为异
[0021]
步电机转子d轴磁通,为状态变量x(t)的导数;
[0022]
u为控制输入,d(t)为低频扰动,y(t)为系统输出;
[0023]
a为系统矩阵,式中γ为系统矩阵参数1,α为系统矩阵参数2,β为系统矩阵参数3,δ为系统矩阵参数4,lr为异步电机的转子电感,rr为异步电机的转子电阻,lm为异步电机的定子与转子之间的互感,ls为异步电机的定子电感,rs为异步电机的定子电阻,ωs为同步转速;
[0024]
b为输入矩阵,b1为常量系数1,b2为常量系数2,
[0025]
e为扰动矩阵,
[0026]
c为输出矩阵,
[0027]
fa(t)为系统的非线性项,式中μ为常量系数3,t
l
表示负载转矩,j为转动惯量,n
p
为极对数;
[0028]
步骤3,对步骤2建立的dq坐标轴下的状态方程进行第一次坐标变换,取可逆矩阵q和s,并记q为变换矩阵1、s为变换矩阵2,满足如下变换关系:
[0029]
[0030][0031]
经第一次坐标变换后,原系统分为两个子系统,分别记为子系统(i)和子系统(ii);
[0032]
子系统(i)的表达式如下:
[0033][0034]
子系统(ii)的表达式如下:
[0035][0036]
其中,z(t)表示经过第一次变换后的状态变量,记为一次状态变量;ω(t)表示经过第一次坐标变换后的输出变量,记为一次输出变量;x1(t)表示状态变量的子变量,记为状态子变量1,z1(t)表示状态子变量1经过q矩阵变换后得到的状态变量,记为子系统(i)状态变量z1(t);x2(t)表示状态变量的另一个子变量,记为状态子变量2,x2(t)=ωm;z2(t)表示状态子变量2经过q矩阵变换后得到的状态变量,记为子系统(ii)状态变量z2(t);y1(t)表示输出变量的子变量,记为输出子变量1,ω1(t)表示输出子变量1经过s矩阵变换后的输出变量,记为子系统(i)输出变量ω1(t),y2(t)表示输出变量的另一个子变量,记为输出子变量2,y2(t)=ωm,ω2(t)表示输出子变量2经过s矩阵变换后的输出变量,记为子系统(ii)输出变量ω2(t);
[0037]
为子系统(i)状态变量z1(t)的导数,b1为子系统(i)的输入矩阵,u1为子系统(i)控制输入,e1为子系统(i)的扰动矩阵,a1为子系统(i)的第一系统矩阵,a2为子系统(i)的第二系统矩阵,d1(t)为子系统(i)的低频扰动,c1表示子系统(i)的输出矩阵,f1(z1(t),z2(t))为子系统(i)的非线性项,记为子系统(i)非线性项f1(z1(t),z2(t)),g为异步电机转子断条故障矩阵,fi(t)为转子断条故障变量;
[0038]
为子系统(ii)状态变量z2(t)的导数,e2为子系统(ii)的扰动矩阵,a3为子系统(ii)的第一系统矩阵,a4为子系统(ii)的第二系统矩阵,f为速度传感器故障矩阵,d2(t)为子系统(ii)的低频扰动,c2为子系统(ii)的输出矩阵,f2(z1(t),z2(t))为子系统(ii)的非线性项,记为子系统(ii)非线性项f2(z1(t),z2(t)),fs(t)为速度传感器故障变量;
[0039]
步骤4,针对子系统(i),设计未知输入观测器,其具体形式如下:
[0040][0041]
其中,v(t)表示过程参数,记为中间变量v(t),表示中间变量v(t)的导数;l1表示子系统(i)的观测器增益矩阵;表示子系统(i)输出变量ω1(t)的观测值,记为第一输出变量观测值t表示观测矩阵1,h表示观测矩阵2,c1表示子系统(i)的输出矩阵;表示子系统(i)状态变量z1(t)的观测值,记为第一状态变量观测值(t)的观测值,记为第一状态变量观测值表示子系统(ii)状态变量z2(t)的观测值,记为第二状态变量观测值(t)的观测值,记为第二状态变量观测值为子系统(i)非线性项f1(z1(t),z2(t))的观测值,记为第一非线性项观测值
[0042]
步骤5,在步骤4的基础上,设计区间观测器,其上界观测器和下界观测器的具体形式如下:
[0043][0044][0045]
其中,v
+
(t)和v-(t)分别表示中间变量v(t)的上界和下界,和分别表示中间变量v(t)导数的上界和下界,和分别表示第一状态变量观测值的上界和下界,和分别表示第二状态变量观测值的上界和下界,和分别表示第一输出变量观测值上界和下界;和分别表示第一非线性项观测值的上界和下界;
[0046]
引入变换矩阵p,记为变换矩阵3,做第二次坐标变换ξ(t)=pz1(t),得到变换后的未知输入区间观测器,其具体形式如下:
[0047]
[0048][0049]
其中,ξ(t)表示经过第二次坐标变换的状态变量,记为二次状态变量ξ(t),表示二次状态变量ξ(t)的观测值,记为二次状态变量观测值示二次状态变量ξ(t)的观测值,记为二次状态变量观测值和分别表示二次状态变量观测值上界和下界,p-1
表示变换矩阵3p的逆矩阵;
[0050]
步骤6,针对子系统(ii)设计滑模观测器,其滑模观测器的具体形式如下:
[0051][0052]
其中,为子系统(ii)非线性项f2(z1(t),z2(t))的观测值,记为第二非线性项观测值l2为子系统(ii)的观测器增益矩阵,表示子系统(ii)输出变量ω2(t)的观测值,记为第二输出变量观测值ks为滑模增益矩阵,sign(s)为符号函数,
[0053]
针对第二非线性项观测值采用局部泰勒展式;
[0054]
则子系统(ii)的滑模观测器的新形式如下:
[0055][0056]
其中,a
21
表示第一状态变量观测值关于z
10
的泰勒展式的系数矩阵,a
22
表示第二状态变量观测值关于z
20
的泰勒展式的系数矩阵;
[0057]
步骤7,定义为残差1,为残差2;
[0058]
步骤8,给定第一故障诊断阈值t
th1
和第二故障诊断阈值t
th2
,给定第一故障诊断残差m
th1
和第二故障诊断残差m
th2
,其表达式如下:
[0059]
t
th1
=k
th1
||ω1(t)||2+k
th2
[0060]
t
th2
=h
[0061]mth1
=||r1||2[0062]mth2
=||r2||2[0063]
其中||||2表示范数,k
th1
表示偏移值1,k
th1
∈(0.5,1),k
th2
表示偏移值2,k
th2
∈(0,2),h表示故障常数,h∈(0.5,2);
[0064]
步骤9,对异步电机系统转子断条故障及速度传感器故障进行诊断,具体认定如下:
[0065]
当m
th1
<t
th1
且m
th2
<t
th2
时,异步电机系统未发生故障;
[0066]
当m
th1
≥t
th1
且m
th2
<t
th2
时,异步电机系统发生转子断条故障;
[0067]
当m
th1
<t
th1
且m
th2
≥t
th2
时,异步电机系统发生速度传感器故障;
[0068]
当m
th1
≥t
th1
且m
th2
≥t
th2
时,异步电机系统发生其他类型的故障。
[0069]
优选地,步骤5所述变换矩阵p的求取方法如下:
[0070]
pa-rp=qc
[0071][0072][0073][0074]
其中,q为参数矩阵1,且满足q=pl1,r为参数矩阵2,且r满足为赫尔维兹矩阵和梅兹内矩阵,o1为参数矩阵3,o2为参数矩阵4,e1为参数向量1,e2为参数向量2,且满足(ta
1-l1c1,e1)和(r,e2)是可观的。
[0075]
优选地,步骤6所述局部泰勒展式的计算式如下:
[0076][0077]
其中,z
10
表示在稳态时的稳定值,z
20
表示在稳态时的稳定值,表示子系统(ii)非线性项f2(z1(t),z2(t))一次展开式,且
[0078]
由于采用了上述故障诊断方法,与现有技术相比,本发明的有益效果为:
[0079]
1、采用坐标变换的方法,将转子断条故障和速度传感器故障解耦;
[0080]
2、针对转子断条故障和速度传感器故障,分别设计不同的观测器以减少误报率;
[0081]
3、实现了对转子断条故障和速度传感器故障的识别与诊断;
[0082]
4、故障诊断过程中不需要额外的硬件,降低了故障检测的成本。
附图说明
[0083]
图1是本发明实施例中异步电机系统拓扑图;
[0084]
图2是本发明诊断方法的示意图;
[0085]
图3是本发明诊断方法的流程图;
[0086]
图4是本发明实施例中当异步电机系统发生转子断条故障时t
th1
与m
th1
的仿真图;
[0087]
图5是本发明实施例中当异步电机系统发生转子断条故障时t
th1
与m
th2
的仿真图;
[0088]
图6是本发明实施例中当异步电机系统发生速度传感器故障时t
th2
与m
th1
的仿真图;
[0089]
图7是本发明实施例中当异步电机系统发生速度传感器故障时t
th2
与m
th2
的仿真图。
具体实施方式
[0090]
下面将结合附图对本发明的技术方案进行清楚、完整的描述。
[0091]
图1是本发明实施例中异步电机系统的拓扑图,由图1可见,所述异步电机系统涉及的电路拓扑结构包括异步电机、电流传感器、速度传感器、驱动模块和控制模块。
[0092]
将所述异步电机的三相接口记为接口γk,k=a,b,c,所述驱动模块的输出点记为输出点输出点与异步电机的接口γk相连接;所述速度传感器的检测端连接在异步电机的输出端,速度传感器的输出端连接控制模块的输入端;所述电流传感器分为三相,并记为k相电流传感器mk,k=a,b,c,k相电流传感器mk的检测端连接在输出点和接口γk之间,k相电流传感器mk的输出端连接控制模块的输入端,所述控制模块的输出端连接驱动模块的输入端。
[0093]
图2是本发明诊断方法的示意图,图3是本发明诊断方法的流程图。由图2和图3可见,所述诊断方法包括以下步骤:
[0094]
步骤1,采样及坐标变换
[0095]
将异步电机等效为直流电机模型,采样异步电机的转速ωm,通过积分获取其机械角度
[0096]
通过电流传感器检测驱动模块的三相输出电流并记为三相输出电流ia,ib,ic,采样驱动模块的三相输出电压并记为三相输出电压ua,ub,uc;
[0097]
通过坐标变换将三相输出电流ia,ib,ic转换成两相输出电流αβ轴分量i
α
,i
β
,再通过park变换将两相输出电流αβ轴分量i
α
,i
β
转换成两相输出电流dq轴分量i
ds
,i
qs
;通过坐标变换将三相输出电压ua,ub,uc转换成两相输出电压αβ轴分量u
α
,u
β
,再通过park变换将两相输出电压αβ轴分量转换成两相输出电压dq轴分量u
ds
,u
qs
。
[0098]
步骤2,建立dq坐标轴下的状态方程,其表达式为:
[0099][0100]
其中,
[0101]
x(y)为状态变量,λ
qr
为异步电机转子q轴磁通,λ
dr
为异
[0102]
步电机转子d轴磁通,为状态变量x(t)的导数;
[0103]
u为控制输入,d(t)为低频扰动,y(t)为系统输出;
[0104]
a为系统矩阵,式中γ为系统矩阵参数1,α为系统矩阵参数2,β为系统矩阵参数3,δ为系统矩阵参数4,lr为异步电机的转子电感,rr为异步电机的转子电阻,lm为异步电机的定子与转子之间的互感,ls为异步电机的定子电感,rs为异步电机的定子电阻,ωs为同步转速;
[0105]
b为输入矩阵,b1为常量系数1,b2为常量系数2,
[0106]
e为扰动矩阵,
[0107]
c为输出矩阵,
[0108]
fa(t)为系统的非线性项,式中μ为常量系数3,t
l
表示负载转矩,j为转动惯量,n
p
为极对数。
[0109]
步骤3,对步骤2建立的dq坐标轴下的状态方程进行第一次坐标变换,取可逆矩阵q和s,并记q为变换矩阵1、s为变换矩阵2,满足如下变换关系:
[0110][0111][0112]
经第一次坐标变换后,原系统分为两个子系统,分别记为子系统(i)和子系统(ii);
[0113]
子系统(i)的表达式如下:
[0114][0115]
子系统(ii)的表达式如下:
[0116][0117]
其中,z(t)表示经过第一次变换后的状态变量,记为一次状态变量;ω(t)表示经过第一次坐标变换后的输出变量,记为一次输出变量;x1(t)表示状态变量的子变量,记为状态子变量1,z1(t)表示状态子变量1经过q矩阵变换后得到的状态变量,记为子系统(i)状态变量z1(t);x2(t)表示状态变量的另一个子变量,记为状态子变量2,x2(t)=ωm;z2(t)表示状态子变量2经过q矩阵变换后得到的状态变量,记为子系统(ii)状态变量z2(t);y1(t)表示输出变量的子变量,记为输出子变量1,ω1(t)表示输出子变量1经过s矩阵变换后的输出变量,记为子系统(i)输出变量ω1(t),y2(t)表示输出变量的另一个子变量,记为输出子变量2,y2(t)=ωm,ω2(t)表示输出子变量2经过s矩阵变换后的输出变量,记为子系统(ii)输出变量ω2(t);
[0118]
为子系统(i)状态变量z1(t)的导数,b1为子系统(i)的输入矩阵,u1为子系统(i)控制输入,e1为子系统(i)的扰动矩阵,a1为子系统(i)的第一系统矩阵,a2为子系统(i)的第二系统矩阵,d1(t)为子系统(i)的低频扰动,c1表示子系统(i)的输出矩阵,f1(z1(t),z2(t))为子系统(i)的非线性项,记为子系统(i)非线性项f1(z1(t),z2(t)),g为异步电机转子断条故障矩阵,fi(t)为转子断条故障变量;
[0119]
为子系统(ii)状态变量z2(t)的导数,e2为子系统(ii)的扰动矩阵,a3为子系统(ii)的第一系统矩阵,a4为子系统(ii)的第二系统矩阵,f为速度传感器故障矩阵,d2(t)为子系统(ii)的低频扰动,c2为子系统(ii)的输出矩阵,f2(z1(t),z2(t))为子系统(ii)的非线性项,记为子系统(ii)非线性项f2(z1(t),z2(t)),fs(t)为速度传感器故障变量。
[0120]
步骤4,针对子系统(i),设计未知输入观测器,其具体形式如下:
[0121][0122]
其中,v(t)表示过程参数,记为中间变量v(t),表示中间变量v(t)的导数;l1表示子系统(i)的观测器增益矩阵;表示子系统(i)输出变量ω1(t)的观测值,记为第一输出变量观测值t表示观测矩阵1,h表示观测矩阵2,c1表示子系统(i)的输出矩阵;表示子系统(i)状态变量z1(t)的观测值,记为第一状态变量观测值(t)的观测值,记为第一状态变量观测值表示子系统(ii)状态变量z2(t)的观测值,记为第二状态变量观测值(t)的观测值,记为第二状态变量观测值为子系统(i)非线性项f1(z1(t),z2(t))的观测值,记为第一非线性项观测值
[0123]
步骤5,在步骤4的基础上,设计区间观测器,其上界观测器和下界观测器的具体形式如下:
[0124][0125][0126]
其中,v
+
(t)和v-(t)分别表示中间变量v(t)的上界和下界,和分别表示中间变量v(t)导数的上界和下界,和分别表示第一状态变量观测值的
上界和下界,和分别表示第二状态变量观测值的上界和下界,和分别表示第一输出变量观测值上界和下界;和分别表示第一非线性项观测值的上界和下界;
[0127]
引入变换矩阵p,记为变换矩阵3,做第二次坐标变换ξ(t)=pz1(t),得到变换后的未知输入区间观测器,其具体形式如下:
[0128][0129][0130]
其中,ξ(t)表示经过第二次坐标变换的状态变量,记为二次状态变量ξ(t),表示二次状态变量ξ(t)的观测值,记为二次状态变量观测值和分别表示二次状态变量观测值上界和下界,p-1
表示变换矩阵3p的逆矩阵。
[0131]
在本实施例中,所述变换矩阵p的求取方法如下:
[0132]
pa-rp=qc
[0133][0134][0135][0136]
其中,q为参数矩阵1,且满足q=pl1,r为参数矩阵2,且r满足为赫尔维兹矩阵和梅兹内矩阵,o1为参数矩阵3,o2为参数矩阵4,e1为参数向量1,e2为参数向量2,且满足(ta
1-l1c1,e1)和(r,e2)是可观的。
[0137]
步骤6,针对子系统(ii)设计滑模观测器,其滑模观测器的具体形式如下:
[0138]
[0139]
其中,为子系统(ii)非线性项f2(z1(t),z2(t))的观测值,记为第二非线性项观测值l2为子系统(ii)的观测器增益矩阵,表示子系统(ii)输出变量ω2(t)的观测值,记为第二输出变量观测值ks为滑模增益矩阵,sign(s)为符号函数,
[0140]
针对第二非线性项观测值采用局部泰勒展式;
[0141]
则子系统(ii)的滑模观测器的新形式如下:
[0142][0143]
在本实施例中,所述局部泰勒展式的计算式如下:
[0144][0145]
其中,z
10
表示在稳态时的稳定值,z
20
表示在稳态时的稳定值,表示子系统(ii)非线性项f2(z1(t),z2(t))一次展开式,且
[0146]
步骤7,定义为残差1,为残差2;
[0147]
步骤8,给定第一故障诊断阈值t
th1
和第二故障诊断阈值t
th2
,给定第一故障诊断残差m
th1
和第二故障诊断残差m
th2
,其表达式如下:
[0148]
t
th1
=k
th1
||ω1(t)||2+k
th2
[0149]
t
th2
=h
[0150]mth1
=||r1||2[0151]mth2
=||r2||2[0152]
其中||||2表示范数,k
th1
表示偏移值1,k
th1
∈(0.5,1),k
th2
表示偏移值2,k
th2
∈(0,2),h表示故障常数,h∈(0.5,2)。
[0153]
步骤9,对异步电机系统转子断条故障及速度传感器故障进行诊断,具体认定如下:
[0154]
当m
th1
<t
th1
且m
th2
<t
th2
时,异步电机系统未发生故障;
[0155]
当m
th1
≥t
th1
且m
th2
<t
th2
时,异步电机系统发生转子断条故障;
[0156]
当m
th1
<t
th1
且m
th2
≥t
th2
时,异步电机系统发生速度传感器故障;
[0157]
当m
th1
≥t
th1
且m
th2
≥t
th2
时,异步电机系统发生其他类型的故障。
[0158]
至此,异步电机系统转子断条故障及速度传感器故障诊断结束。
[0159]
在本实施方式中,涉及矩阵的具体数值如下:
[0160][0161][0162]
a2=a3=a4=0,
[0163][0164]
l2=6.8,
[0165][0166]
为了佐证本发明的有益效果,进行了如下仿真。
[0167]
图4是本发明实施例中当异步电机系统发生转子断条故障时t
th1
、m
th1
的仿真图。由图看出,当在0.6s发生故障时,m
th1
>t
th1
,异步电机系统诊断出发生转子断条故障。
[0168]
图5是本发明实施例中当异步电机系统发生转子断条故障时t
th1
、m
th2
的仿真图。由图看出,当在0.6s发生故障时,m
th2
<t
th1
,排除发生速度传感器故障,确定是转子断条故障。
[0169]
图6是本发明实施例中当异步电机系统发生速度传感器故障时t
th2
、m
th1
的仿真图。由图看出,当在0.6s发生故障时,m
th1
<t
th2
,排除发生了转子断条故障。
[0170]
图7是本发明实施例中当异步电机系统发生速度传感器故障时t
th2
、m
th2
的仿真图。由图看出,当在0.6s发生故障时,m
th2
>t
th2
,判断发生了速度传感器故障。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1