一种双通道宽带雷达目标及干扰模拟系统的制作方法
1.本发明属于电子对抗技术领域,具体涉及一种双通道宽带雷达目标及干扰模拟系统。
背景技术:
2.在典型战场环境下,雷达在进行空中目标监视探测的同时,还将面临着地杂波、气象杂波、箔条等无源干扰以及电子战飞机施放的有源干扰信号。现有技术中,地面设备使用时受限于场地需要架设在高塔上,无法模拟俯仰角度变化;挂载常规无人机平台受限于电池容量(通常为2个小时),无法进行长时间工作。
技术实现要素:
3.为解决现有技术中的不足,本发明提供一种双通道宽带雷达目标及干扰模拟系统,可以解决对俯仰角度变化的模拟,同时解决了无人机平台的续航问题。
4.为达到上述目的,本发明所采用的技术方案是:一种雷达目标及干扰模拟系统,包括机载电子载荷装置、承载平台和地面保障装置;所述承载平台为系留无人机装置或地面高塔;所述机载电子载荷装置用于模拟产生沿设定航线飞行的目标回波及干扰信号;所述系留无人机装置,用于携带所述机载电子载荷装置沿水平和垂直方向移动,模拟目标到达的方位和俯仰角度;所述地面高塔,用于安装所述机载电子载荷装置以模拟产生固定目标或按设定航迹运动目标的雷达回波信号,等效模拟目标的距离信息、多普勒信息、方位角度信息和目标幅度变化特性;所述地面保障装置分别与所述机载电子载荷装置、系留无人机装置进行数据通信。
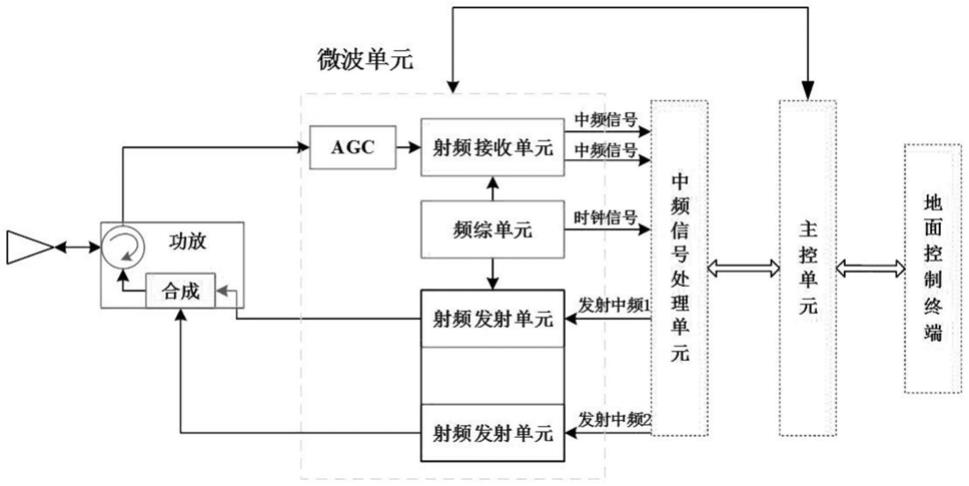
5.进一步地,所述机载电子载荷装置包括依次电连接的天线单元、功放单元、微波单元、中频信号处理单元和主控单元;微波单元包括射频接收单元和两路射频发射单元,两路射频发射单元合成后与天线单元电连接,射频接收单元与天线单元电连接。
6.进一步地,所述系留无人机装置包括旋翼无人机平台、系留线缆、系留控制箱和地面站,旋翼无人机平台通过系留线缆与系留控制箱电连接,系留控制箱用于向旋翼无人机平台提供电能并转发地面站对旋翼无人机平台的控制信号及旋翼无人机平台的运行数据。
7.进一步地,所述地面保障装置包括载车,用于运载操控平台、定位设备、数据处理设备、系留线缆、系留控制箱和地面站;所述操控平台用于向机载电子载荷装置、系留无人机装置发送控制指令并接收其运行数据;所述定位设备用于获取定位信息;所述数据处理设备包括频谱仪、信号源和示波器。
8.进一步地,当承载平台为系留无人机装置时,机载电子载荷装置工作于空中挂飞模式,采用数字信号处理技术对中频信号的延迟调制、幅度调制、多普勒调制模拟目标到达的距离和速度;对中频信号的干扰调制模拟多种样式的电子干扰信号,用于雷达设备训练、试验、功能检查和性能评估任务。
9.进一步地,当机载电子载荷装置工作于空中挂飞模式时,采用收发分时的工作时
序,只针对单部被试雷达进行电子对抗模拟试验。
10.进一步地,当承载平台为地面高塔时,机载电子载荷装置工作于地面固定模式,所述天线单元包括发射天线和接收天线,微波单元中的两路射频发射单元合成后与发射天线电连接;接收天线与微波单元中的射频接收单元电连接。
11.进一步地,当机载电子载荷装置工作于地面固定模式时,采用收发同时的工作时序,机载电子载荷装置在接收发射信号的同时,发射模拟的目标信号或干扰信号。
12.与现有技术相比,本发明所达到的有益效果:本发明通过将承载平台设置为系留无人机装置或地面高塔,机载电子载荷装置独立产生目标、干扰信号用于模拟产生沿设定航线飞行的目标回波及干扰信号,系留无人机装置用于携带所述机载电子载荷装置沿水平和垂直方向移动模拟目标到达的方位和俯仰角度,地面高塔用于安装机载电子载荷装置以模拟产生固定目标或按设定航迹运动目标的雷达回波信号,等效模拟目标的距离信息、多普勒信息、方位角度信息和目标幅度变化特性,可以解决对俯仰角度变化的模拟,同时解决了无人机平台的续航问题。
附图说明
13.图1是本发明实施例中空中挂飞模式工作原理示意图;图2是本发明实施例中地面固定模式工作原理示意图;图3是本发明实施例中无人机机载电子载荷装置航线等比关系一;图4是本发明实施例中无人机机载电子载荷装置航线等比关系二;图5是本发明实施例中收发分时工作时序图;图6是本发明实施例中收发同时工作时序图。
具体实施方式
14.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
15.一种双通道宽带雷达目标及干扰模拟系统,包括机载电子载荷装置、承载平台和地面保障装置;所述承载平台为系留无人机装置或地面高塔;所述机载电子载荷装置用于模拟产生沿设定航线飞行的目标回波及干扰信号;所述系留无人机装置,用于携带所述机载电子载荷装置沿水平和垂直方向移动,模拟目标到达的方位和俯仰角度;所述地面高塔,用于安装所述机载电子载荷装置以模拟产生固定目标或按设定航迹运动目标的雷达回波信号,等效模拟目标的距离信息、多普勒信息、方位角度信息和目标幅度变化特性;所述地面保障装置分别与所述机载电子载荷装置、系留无人机装置进行数据通信,同时提供运输。
16.本实施例具备在外场雷达阵地环境下,通过采用系留无人机挂载平台或地面(高塔)架设等方式营造典型作战条件下的目标和干扰回波信号,提供可控的试验态势构建能力,为被试雷达系统性能指标测试和评估提供各种雷达目标回波信号和有源干扰信号等。
17.外场试验时,将机载电子载荷装置设定在预定位置,一般距离雷达天线500m~2000m,满足远场条件要求。在受训设备的近距离位置点等比模拟远距离位置上的目标和干扰机的航迹变化,包括方位、俯仰、距离、速度和波束入射角等。采用具有数字射频存储技术,按照真实航迹和模拟航迹的等比关系模拟目标回波和干扰信号的到达距离、多普勒和
幅度等信号特征。
18.本实施例具体包括以下功能:(1)雷达目标回波信号模拟功能:模拟产生固定目标或按设定航迹运动目标的雷达回波信号,在一定范围内等效模拟目标的距离信息、多普勒信息、方位角度信息、俯仰角度信息和目标幅度变化特性,用于检测和评估雷达探测威力、探测精度、分辨力等系统性能指标;(2)干扰信号模拟功能:模拟产生压制干扰(窄带瞄频干扰、宽带阻塞干扰、扫频干扰、梳状谱干扰等)和欺骗干扰(多假目标干扰、速度拖引干扰、距离拖引干扰、距离+速度拖引干扰、灵巧噪声、切片干扰等);干扰参数可以进行人工设置;具有干扰样式组合、干扰策略编程及设定,用于检测和评估雷达抗干扰性能指标;(3)任务规划和航迹控制功能:通过系统主控软件对任务进行编辑设定,在一定范围内设置无人机平台的运动轨迹等效模拟真实航迹,试验前通过战情文件下载的方式传输到无人机平台和机载电子载荷装置;(4)灵活控制功能:对于不同频段的机载电子载荷装置,软件进行统一化设计;可实现单套设备的控制,也可对联网的多套设备同时进行独立控制;(5)具有系统bite功能,故障定位到可更换功能单元;(6)具备时统功能,支持试验数据和参数记录、存储和上报功能。
19.本实施例的系统指标包括:(1)频率范围:2ghz~18ghz;(2)适应雷达信号形式:常规脉冲、线性调频、连续波等;(3)瞬时工作带宽:2ghz;(4)接收机灵敏度:-50dbm;(5)等效辐射功率:20dbw;(6)模拟目标距离:1km~1000km;(7)模拟目标速度:范围:0~
±
7000m/s(0~20ma),可设置;精度:优于1m/s;多普勒频移精度:≤1hz;(8干扰样式:压制干扰、欺骗干扰和组合干扰样式。
20.本实施例系统组成包括:机载电子载荷装置、系留无人机装置或地面高塔、地面保障设备等组成。
21.机载电子载荷装置包括天线单元、功放单元、微波单元(两路射频发射单元)、中频信号处理单元、主控单元和电源单元等组成。
22.系留无人机系统包括旋翼无人机平台、系留线缆、系留控制箱和地面站(加固便携式计算机)等组成。
23.地面保障设备包括载车、操控平台(便携式计算机)、油机、配套设备(时统设备、定位/定北设备、光端机、频谱仪、信号源和示波器等)等组成。
24.本实施例工作模式分为空中挂飞模式和地面固定模式。两种工作模式下,系统的收发模式、设备构架和功能实现均有不同。
25.1)空中挂飞模式空中挂飞模式时,利用系留无人机平台下方挂载机载电子载荷装置在近距离上等比模拟产生远距离沿设定航线飞行的目标回波及干扰信号,通过系留无人机平台的水平和垂直方向的运动模拟目标到达的方位和俯仰角度;采用数字信号处理技术对中频信号的延迟调制、幅度调制、多普勒调制模拟目标到达的距离和速度;对中频信号的干扰调制模拟多种样式的电子干扰信号,用于雷达设备训练、试验、功能检查、性能评估等任务。空中挂飞工作模式时采用收发分时的工作时序,只针对单部被试雷达进行电子对抗模拟试验。考虑到
天线在无人机平台安装条件受限,如同时加装接收和发射天线;系统设计的收发隔离度较难控制,发射信号将会严重影响接收信号,并导致收发自激,干扰失效,空中挂飞模式工作原理如图1所示。
26.2)地面固定模式地面固定模式时,机载电子载荷装置可固定架设在高塔或地面上使用;模拟产生固定目标或按设定航迹运动目标的雷达回波信号,等效模拟目标的距离信息、多普勒信息、方位角度信息和目标幅度变化特性,用于雷达设备训练、试验、功能检查、性能评估等任务。地面固定工作模式时采用收发同时的工作时序,可对两部被试雷达进行电子对抗模拟试验。地面安装时,收发天线可以分开架设不受限,接收通道连接机载天线,两路射频发射单元合成后连接地面功放送至地面天线。系统可工作于收发同时模式,机载电子载荷装置在接收发射信号的同时,发射模拟的目标信号或干扰信号,地面固定模式工作原理如图2所示。
27.本实施例工作原理包括:1)静态模拟采用无人机挂载平台,在受训设备的近距离位置点等比模拟远距离位置上的目标和干扰机的航迹变化。当系留无人机升空后一致处于悬停状态,不做目标俯仰角度变化的模拟;可实现目标距离、速度等模拟,如图3所示。
28.2)动态模拟采用无人机挂载平台,在受训设备的近距离位置点等比模拟远距离位置上的目标和干扰机的航迹变化。由于考虑到无人机的飞行安全,系留无人机只做高度上的升降变化;结合无人机高度和目标距离变化实现目标由远至近或由近至远的航迹模拟,如图4所示。
29.3)收发分时工作时序机载工作模式下,设备工作体制采用收发分时且只针对单部雷达进行电子对抗,如图5所示。
30.4)收发同时工作时序地面固定工作模式时由于收发天线可以分开位置架设,增加系统收发隔离度;可采用收发同时的工作时序,可对两部被试雷达进行电子对抗模拟试验,如图6所示。
31.本实施例工作流程包括:1)安装准备进行试验前,需先考察雷达试验阵地,根据任务需要,综合考虑远场距离要求、通视要求、目标与干扰方位角度间隔要求、空域安全要求等因素,选择无人机载目标机载电子载荷装置的飞行空域。
32.地面试验车行驶到外场试验地点,将油机、无人机和机载电子载荷装置按顺序搬运至选定的试验区域,考虑到油机较重,采用试验车后部的辅助托板依靠油机底部滚轮滑出,推到相应位置。到达起飞点位后,将机载电子载荷装置安装到无人机平台上,机载电子载荷装置开机自检,系统运行正常后即可进行后续的试验工作。
33.2)首次联调准备机载电子载荷装置在首次到达飞行点位后,需进行试验前的联调工作。
34.机载电子载荷设备上电自检正常,无需进行标校;可满足外场日常训练任务。
35.试验前已知被试设备的工作频率范围,通过主控软件进行试验频率设定直接控制本振至相应频率。
36.a)无人机升至设定高度后悬停,被试雷达正常开机,对空辐射信号。机载电子载荷装置接收雷达信号,观察雷达工作周期内机载电子载荷装置对其信号的接收情况;b)控制目标机载电子载荷装置产生某特定距离的目标信号,在雷达终端观察该模拟目标信号,调整机载电子载荷装置的输出功率,使得模拟目标幅度与真实目标回波相当;c)控制干扰机载电子载荷装置产生噪声压制干扰,被试雷达关机。在雷达天线阵面中心位置测量干扰功率;d)根据测试结果,调整载电子载荷装置的输出功率,使得雷达端接收到的干扰功满足试验要求,等效于试验环境下模拟对象施放的干扰功率谱密度。
37.3)试验过程机载电子载荷装置经过首次联调后(一个雷达阵地只需一次联调),便可进入正式试验:a)起飞前,根据航线等比规划无人机模拟航线;b)机载电子载荷装置装载被试雷达参数、模拟目标或干扰类型参数,并进行系统初始化;c)无人机起飞,到达预定航迹点,打开模拟信号输出信号,持续进行模拟;d)无人机飞行过程中,通过系留电缆(网络信号)实时回传无人机实际航线位置以及机载电子载荷装置当前模拟状态到地面显控终端进行观测;e)无人机飞行过程中,可由地面控制终端通过系留电缆(网络信号)指令干预机载电子载荷装置输出功率;f)无人机飞行过程中,机载电子载荷装置以同步时间实时记录当前模拟信号的航迹位置、信号样式和信号功率等参数;g)无人机返航前,关闭机载电子载荷装置的输出信号;h)无人机返航到地面,通过试验记录数据对雷达探测结果进行比对分析处理。
38.4)撤收过程系统撤收的主要步骤如下:a)在控制终端界面上依次点击“试验结束”和“退出”按钮,控制系统停止辐射信号;b)系留无人机一键回收,关闭设备电源,拆卸下机载电子载荷装置和天线并装回包装盒;c)按顺序收回油机、无人机和机载电子载荷装置并装上地面试验车。
39.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1