一种近距离探测器的制作方法
1.本发明涉及探测器技术领域,具体涉及一种近距离探测器。
背景技术:
2.在机器人和视觉领域中,开发了许多障碍检测和回避等相关技术,这些技术采用了各种类型的距离传感器(例如激光雷达、雷达、红外、声纳)和摄像头。这些技术考虑了广泛的目标对象来检测和估计它们的相关距离。在室内环境中的移动机器人(如扫地机器人),也一样需要感知室内环境,他们使用各种类型的传感器来检测和测量周围的世界以及他们自己在其中的进展,包括悬崖传感器(cliff sensor)、碰撞传感器(bump sensor)、墙壁传感器和光学编码器。其中的悬崖探测器是必须的传感器,相关机器人都会应用,是用来感应台阶的高度,每个传感器由一个红外发射管(ir led)和红外接收管(ir pd)组成。悬崖传感器通常通过从地板上反射红外线来测量机器人底座和地板之间的距离。如果到地板的距离突然增加,这意味着机器人正在接近楼梯边缘或类似的东西,它会通过后退以避免跌倒,因此得名“悬崖传感器”。
3.当前近距离探测器测试远近的能力有限,主要是有各种杂光的干扰因素,其性噪比低。这种干扰导致的后果可能有两种:第一种情形是高估,会导致本来高度差很低,可以跨越,但是误探测为较大的高度差而后退不前;第二种情形是低估,本来高度差较高,信号受杂光影响被干扰,因而误判为低高度差,导致机器坠坏。
技术实现要素:
4.针对以上问题,本发明提供一种近距离探测器,在发射源、接收芯片上侧分别增加了第一透镜、第二透镜,第一透镜上侧形成发射照亮区,第二透镜上侧形成接收可视区,并设计了第一透镜、第二透镜特定的结构以及各面的参数,使得发射照亮区与接收可视区在不同的障碍物距离下,平均相交的有效可视区域较大,提升了能量利用率,从而提高信号强度。
5.为实现上述目的,本发明通过以下技术方案来解决:一种近距离探测器,包括黑色挡板、位于所述黑色挡板两侧的发射源、接收芯片、位于所述发射源上侧的第一透镜、位于所述接收芯片上侧的第二透镜;所述第一透镜具有靠向物侧的第一出光面、靠向所述发射源一侧的第一入光面、靠向所述黑色挡板一侧的第一侧面,所述第一出光面为平面;所述第二透镜具有靠向物侧的第二入光面、靠向所述接收芯片一侧的第二出光面、靠向所述黑色挡板一侧的第二侧面,所述第二入光面为平面;所述发射源发射的光线经过所述第一透镜的折射,在所述第一透镜上侧形成发射照亮区;所述第二透镜上侧形成接收可视区,接收可视区内的光线经过所述第二透镜的折射能够被所述接收芯片接收;
所述发射照亮区与所述接收可视区具有交集,并形成近端交集区、最大交集区、远端交集区,所述近端交集区靠向所述黑色挡板一侧设置,所述近端交集区至所述最大交集区为信号渐强区,所述最大交集区至所述远端交集区为信号渐弱区。
6.具体的,所述远端交集区的中心与所述黑色挡板上端面中心之间的距离大于80mm。
7.具体的,所述第一入光面、第二出光面均为自由曲面、普通球面或非球面。
8.具体的,所述发射源的中心光线在所述第一入光面上的入射点设定为点o1,点o1位置的法线与所述发射源的中心光线的夹角设定为θ1,3
°
<θ1<30
°
;所述接收芯片的中心光线在所述第二出光面上的出射点设定为点o2,点o2位置的法线与所述接收芯片的中心光线的夹角设定为θ2,3
°
<θ2<30
°
。
9.具体的,所述第一入光面的最低点p1与所述发射源连成的直线与所述发射源的中心光线形成的夹角为t1,5
°
<t1<50
°
;所述第二出光面的最低点p2与所述接收芯片连成的直线与所述接收芯片的中心光线形成的夹角为t2,5
°
<t2<50
°
。
10.具体的,所述第一透镜还具有第三侧面,所述第三侧面远离所述黑色挡板一侧设置,所述第三侧面与所述第一入光面的交界处具有点e1,所述点e1与所述点o1连成的直线与所述发射源的中心光线形成的钝角为δ1,105
°
<δ1<135
°
;所述第二透镜还具有第四侧面,所述第四侧面远离所述黑色挡板一侧设置,所述第四侧面与所述第二出光面的交界处具有点e2,所述点e2与所述点o2连成的直线与所述接收芯片的中心光线形成的钝角为δ2,105
°
<δ2<135
°
。
11.具体的,所述第一侧面与所述黑色挡板之间形成夹角γ1,0
°
<γ1<90
°
;所述第二侧面与所述黑色挡板之间形成夹角γ2,0
°
<γ2<90
°
。
12.具体的,所述黑色挡板靠向物侧一端连接有第一挡片,所述第一挡片一端延伸至所述第一出光面一侧,另一端延伸至所述第二入光面一侧。
13.具体的,所述黑色挡板中部设有第二挡片,所述第二挡片一端延伸至所述第一入光面一侧,另一端延伸至所述第二出光面一侧。
14.具体的,所述第三侧面为磨砂面,所述第三侧面表面涂覆有第一防反射涂层,所述第四侧面为磨砂面,所述第四侧面表面涂覆有第二防反射涂层。
15.本发明的有益效果是:1.本发明的近距离探测器,在发射源、接收芯片上侧分别增加了第一透镜、第二透镜,第一透镜上侧形成发射照亮区,第二透镜上侧形成接收可视区,并设计了第一透镜、第二透镜特定的结构以及各面的参数,使得发射照亮区与接收可视区在不同的障碍物距离下,平均相交的有效可视区域较大,提升了能量利用率,从而提高信号强度;2.设计了多种消杂光方式,降低了噪光,使得远距离信号探测能力增强,提高了性噪比。
附图说明
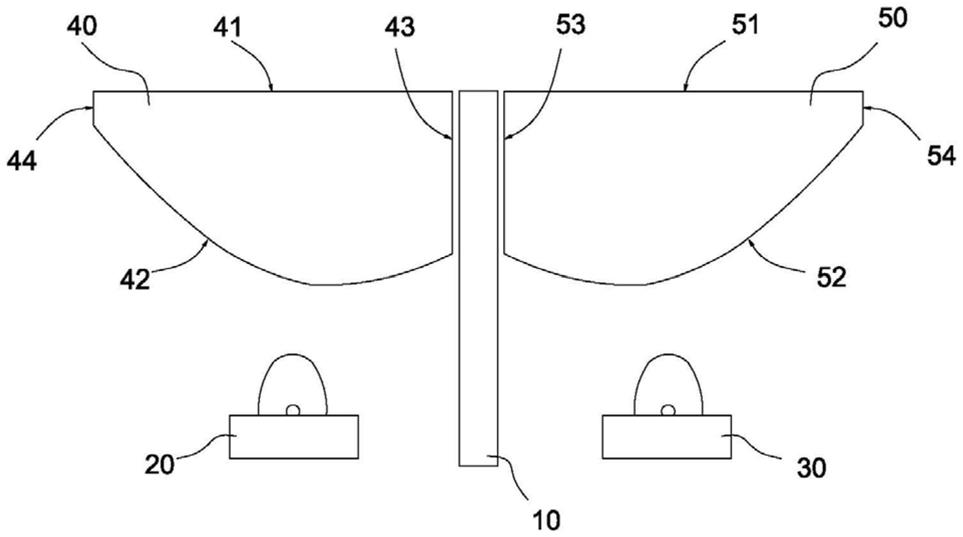
16.图1为实施例1的近距离探测器的结构示意图。
17.图2为实施例1的近距离探测器的尺寸结构图。
18.图3为实施例1的近距离探测器的光线模拟图。
19.图4为实施例1的近距离探测器探测近处障碍物时的光线模拟图一。
20.图5为实施例1的近距离探测器探测远处障碍物时的光线模拟图一。
21.图6为实施例1的近距离探测器探测近处障碍物时的光线模拟图二。
22.图7为实施例1的近距离探测器探测远处障碍物时的光线模拟图二。
23.图8为实施例2的近距离探测器探测远处障碍物时的光线模拟图。
24.图9为实施例3的近距离探测器探测远处障碍物时的光线模拟图。
25.图10为实施例4的近距离探测器探测远处障碍物时的光线模拟图。
26.图11为实施例5的近距离探测器探测远处障碍物时的光线模拟图。
27.图12为实施例1、2的近距离探测器消杂光前后的信号强度与探测距离关系图。
28.附图标记为:黑色挡板10、第一挡片11、第二挡片12、发射源20、接收芯片30、第一透镜40、第一出光面41、第一入光面42、第一侧面43、第三侧面44、第二透镜50、第二入光面51、第二出光面52、第二侧面53、第四侧面54、近端交集区61、最大交集区62、远端交集区63、第一防反射涂层71、第二防反射涂层72、近处障碍物81、远处障碍物82、发射杂光区83、有害可视区84、可视杂光区85。
具体实施方式
29.下面结合实施例和附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
30.实施例1请参照图1至图5。
31.一种近距离探测器,包括黑色挡板10、位于黑色挡板10两侧的发射源20、接收芯片30、位于发射源20上侧的第一透镜40、位于接收芯片30上侧的第二透镜50,发射源20采用发光二极管;第一透镜40具有靠向物侧的第一出光面41、靠向发射源20一侧的第一入光面42、靠向黑色挡板10挡板一侧的第一侧面43,第一出光面41为平面;第二透镜50具有靠向物侧的第二入光面51、靠向接收芯片30一侧的第二出光面52、靠向黑色挡板10一侧的第二侧面53,第二入光面51为平面;发射源20发射的光线经过第一透镜40的折射,在第一透镜40上侧形成发射照亮区;第二透镜50上侧形成接收可视区,接收可视区内的光线经过第二透镜50的折射能够被接收芯片30接收;发射照亮区与接收可视区具有交集,并形成近端交集区61、最大交集区62、远端交集区63,近端交集区61靠向黑色挡板10一侧设置,黑色挡板10与近端交集区61之间的发射照亮区与接收可视区不具有交集,为近处信号盲区,一般可设计为小于7mm,而由于探测器自身在机器人中有一定安装高度,故而为非工作区;近端交集区61至最大交集区62为信号渐强区,可设置为7mm到15mm间,最大交集区62为信号最强处,可设置在15mm以内,最大交集区62至远端交集区63为信号渐弱区,信号渐弱区内,随着探测距离越远信号越弱,远端交集区63以外的位置,由于发射照亮区与接收可视区不具有交集,为远处信号盲区,说明障碍物较远,处于悬崖边缘。
32.优选的,为了加大近距离探测器的探测距离,远端交集区63的中心与黑色挡板10上端面中心之间的距离大于80mm。
33.优选的,第一入光面42、第二出光面52为主要调制光学面,第一入光面42、第二出光面52均为自由曲面。
34.优选的,发射源20的中心光线在第一入光面42上的入射点设定为点o1,点o1位置的法线与发射源20的中心光线的夹角设定为θ1,接收芯片30的中心光线在第二出光面52上的出射点设定为点o2,点o2位置的法线与接收芯片30的中心光线的夹角设定为θ2,θ1与θ2角度大小影响了信号最强位置,角度越小,则最强位置越远,本实施例设置的θ1与θ2的角度大小满足以下条件:3
°
<θ1=θ2<30
°
。
35.优选的,第一入光面42的最低点p1与发射源20连成的直线与发射源20的中心光线形成的夹角为t1,第二出光面52的最低点p2与接收芯片30连成的直线与接收芯片30的中心光线形成的夹角为t2,t1与t2的角度大小会对能量的近处分布有影响,角度越小,盲区会越大,角度越大,盲区越小,本实施例设置的t1与t2的角度大小满足以下条件:5
°
<t1=t2<50
°
。
36.优选的,第一透镜40还具有第三侧面44,第三侧面44远离黑色挡板10一侧设置,第三侧面44与第一入光面42的交界处具有点e1,点e1与点o1连成的直线与发射源20的中心光线形成的钝角为δ1,第二透镜50还具有第四侧面54,第四侧面54远离黑色挡板10一侧设置,第四侧面54与第二出光面52的交界处具有点e2,点e2与点o2连成的直线与接收芯片30的中心光线形成的钝角为δ2,δ1与δ2的角度大小会影响测距长度和能量利用率,角度较小时,发射源20发生的光线能量照射位置更远,角度较大时,照射位置更近,因此可以依据此原理调节远处盲区的位置。但是,该角度不能过小,否则发射照亮区的能量发散,与接收可视区无交集,发射能量只能耗散,从而造成信号弱;该角度也不宜过大,否则能量过于集中于近处,造成探测距离短,本实施例设置的δ1与δ2的角度大小满足以下条件:105
°
<δ1=δ2<135
°
。
37.此外,第一透镜40、第二透镜50可设计上述的三个角度的差异小于20
°
,最佳情况为上述采用的对称设计,第一透镜40、第二透镜50的参数一致,这样发射照亮区与接收可视区在近处障碍物81或远处障碍物82下,平均相交的有效可视区域最大,提升了能量利用率,从而提高信号强度。
38.然而,如图6-7所示,使用上述实施例1的近距离探测器对近处障碍物81进行探测时,由于第一透镜40的第一侧面43以及第二透镜50的第二侧面53存在内全反射,发射源20会产生发射杂光区83,接收芯片30能接收到有害可视区84的信号,从而产生杂光污染,影响近距离探测器的判断;近距离探测器对远处障碍物82进行探测时,由于接收可视区边缘与有害可视区84具有交集,交集处产生可视杂光区85,从而产生杂光污染,影响近距离探测器的判断。
39.为了消除杂光,避免信号串扰,本发明还设计了以下如实施例2~5的调整。
40.实施例2请参照图8。
41.本实施例中,第一侧面43与黑色挡板10之间形成夹角γ1,第二侧面53与黑色挡板10之间形成夹角γ2,γ1与γ2满足以下条件:0
°
<γ1=γ2<90
°
。将第一侧面43设计成一定的倾斜角度,从而使出射的杂光光线被中间的黑色挡板10吸收,从而避免杂光光线出射;将
第二侧面53设计成具有一定的倾斜角度,从而使入射光线偏折,使得有害可视区84的光线无法被接收芯片30接收。
42.实施例3请参照图9。
43.本实施例中,黑色挡板10靠向物侧一端连接有第一挡片11,第一挡片11一端延伸至第一出光面41一侧,使得第一出光面41一侧形成黑色挡光区,能够将发射源20出射的杂光光线吸收,而第一挡片11另一端延伸至第二入光面51一侧,使得第二入光面51一侧形成黑色挡光区,从而使放射的杂光光线被吸收。
44.实施例4请参照图10。
45.本实施例中,黑色挡板10中部设有第二挡片12,第二挡片12一端延伸至第一入光面42一侧,使得第一入光面42一侧形成黑色挡光区,能够将发射源20出射的杂光光线吸收,另一端延伸至第二出光面52一侧,使得第二出光面52一侧形成黑色挡光区,从而使放射的杂光光线被吸收。
46.实施例5请参照图11。
47.本实施例中,第三侧面44为磨砂面,第三侧面44表面涂覆有第一防反射涂层71,第一防反射涂层71可采用黑色防反射油墨,发射源20出射的杂光光线被磨砂面打散再被第一防反射涂层71吸收;第四侧面54为磨砂面,第四侧面54表面涂覆有第二防反射涂层72,第二防反射涂层72可采用黑色防反射油墨,入射的杂光光线被磨砂面打散再被第二防反射涂层72吸收。
48.实施例1为无消杂光功能的近距离探测器,实施例2为可消杂光的近距离探测器,将实施例1和2进行光线模拟对比,得到如图12所示的信号强度与探测距离关系图,根据图12可明显看出,实施例2对于远距离(超过35mm)的消除杂光效果明显。
49.以上实施例仅表达了本发明的5种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1