一种实时路径规划方法及AGV
一种实时路径规划方法及agv
技术领域
1.本发明属于机器人技术领域,更具体地,本发明涉及一种实时路径规划方法及agv。
背景技术:
2.随着物料输送系统、柔性制造系统、自动化立体仓库系统等的发展,agv(automated guided vehicle,自动运输小车)、车辆等作为物料输送系统和柔性制造系统中的重要组成部分,可以解决传统物流系统的弊端,在制造业输送环节得到了广泛的应用。而在实际工业现场中,往往会有多台agv同时进行作业,当这些agv共享固定路径时,有效的导航策略决定了各个机器人能否有效地协调作业,路径规划算法的时间复杂度及鲁棒性决定了机器人能否搜索出有效的路径,并且不会发生与其它的机器人及障碍物的碰撞。
3.现如今路径规划方法如a*算法,利用a*算法构建启发函数,并设定合理的估价函数后,从而求解agv任务的行驶路径。但该方法只是适应于agv处于节点路径下的路径规划,agv行驶路径上的某段可能突然被其它障碍物占据,此外agv需要进行避障,agv偏离了节点路径,无法基于a*算法规划的路径进行行驶。
技术实现要素:
4.本发明提供一种实时路径规划方法,旨在改善上述问题。
5.本发明是这样实现的,一种实时路径规划方法,所述方法具体包括如下步骤:
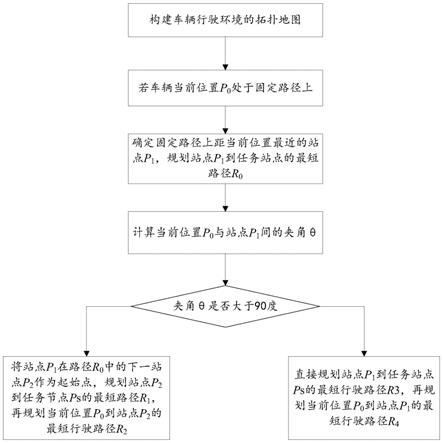
6.s1、构建车辆行驶环境的拓扑地图,生成从起始站点到任务站点的最短行驶路径;
7.s2、车辆行驶过程中,实时检测车辆当前位置p0是否处于固定路径上,若检测结果为否,则执行步骤s3;
8.s3、确定固定路径上距当前位置最近的站点p1,规划站点p1到任务站点的最短路径r0;
9.s4、计算当前位置p0与站点p1间的夹角θ,若abs(θ)>90
°
,执行步骤s5,
10.s5、将站点p1在路径r0中的下一站点p2作为起始点,规划站点p2到任务节点ps的最短路径r1,再规划当前位置p0到站点p2的最短行驶路径r2,路径r2与路径r1的拼接即形成当前位置p0到任务站点ps的行驶路径r。
11.进一步的,若abs(θ)≤90
°
度,则执行步骤s6;
12.s6、直接规划站点p1到任务站点ps的最短行驶路径r3,再规划当前位置p0到站点p1的最短行驶路径r4,路径r3与路径r4的拼接即形成当前位置p0到任务站点的行驶路径r。
13.进一步的,在步骤s6之后还包括:
14.s7、在路径规划完毕后,更显当前车辆的路段权值,基于车辆的路段权值来更新规划路径中各路段的长度,其中,更新后的路段长度等于路段初始长度与路段权值*路段初始长度之和。
15.进一步的,车辆基于规划路径的行驶过程中,实时检测车辆当前位置是否为站点
位置,若当前位置为站点位置,则判断下一行驶路段上的车辆数量,若下一路段上的车辆数量大于数量阈值,则下一路段进行标记为不通,以当前位置为起点,重新规划当前位置到任务站点的最短行驶路径,基于重新规划的最短行驶路径进行行驶,同时针对重新规划的最短行驶路径执行步骤s7。
16.进一步的,当前位置p0与站点p1间夹角θ的计算公式具体如下:
[0017][0018]
其中,angle为车辆当前位置中的方向,(x0,y0)为当前位置p0在栅格地图中的坐标为,(x1,y1)为站点p1在栅格地图中的坐标。
[0019]
本发明是这样实现的,一种agv,所述agv包括处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现上述实时路径规划方法。
[0020]
本发明提出了一种实时路径规划方法具有如下有益技术效果:
[0021]
1)在车辆偏离固定行驶路径时,在行驶路径上搜索距当前位置近且夹角小于90度的站点进行最短路径规划,避免车辆的掉头行驶;
[0022]
2)路径长度更新:路径经过的车辆越多,其在栅格地图中的长度就会越长,在进行全局最短路径规划时,其被选中作为行驶路段的概率就会变小,进而减小路段堵塞的概率。
[0023]
3)实时监测下一路段上的车辆数量,在下一路段上的车辆数过多时,基于当前位置重新进行最短路径规划,基于二次规划的行驶路径进行行驶,以减小下一路段的车流量,减小车辆在下一段堵塞的风险;
[0024]
综上所述,本发明所提出的路径规划方法,适应范围广,适合园区工厂内部存在多条车辆同时进行作业的路径规划,是对原有的调度系统进行了一次优化,且解决了agv或激光叉车无法掉头的场景,解决了车辆任意位置下规划最短路径的问题,降低了系统的难度、提高了运输效率。
附图说明
[0025]
图1为本发明实施例提供的实时路径规划方法流程图;
[0026]
图2为本发明实施例提供的行驶环境的拓扑图的示意图。
具体实施方式
[0027]
下面对照附图,通过对实施例的描述,对本发明的具体实施方式作进一步详细的说明,以帮助本领域的技术人员对本发明的发明构思、技术方案有更完整、准确和深入的理解。
[0028]
图1为本发明实施例提供的实时路径规划方法的流程图,该方法具体包括如下步骤:
[0029]
s1、构建车辆行驶环境的拓扑地图,基于astar算法直接规划起点站点到任务站点的最短行驶路径;
[0030]
设计工厂内车辆行驶的路线图,标记出车辆的充电站点、上料/下料站点、待命站点以及路线站点的坐标,车辆行驶的路线为双向行驶路线,且车辆在同一时间段只能接受
一项任务,在车辆执行当前任务期间,不可对此车辆进行任务派发,采用拓扑结构建立agv或激光雷达在工厂内物料运输车间的工作环境模型,环境中的站点即为拓扑地图中的节点,两节点间的边即为路径。
[0031]
s2、车辆在行驶过程中,实时检测车辆当前位置p0是否处于固定路径上,若检测结果为否,则执行步骤s3,若检测结果为是,则基于astar算法规划当前位置p0到任务节点ps的最短路径;
[0032]
本发明中的车辆为agv或激光叉车,车辆能够实时获取自身的位置信息;并实时将车辆的状态信息保存在数据库中,状态信息包含了当前车辆的编号、车辆的位置、车辆的角度、车辆的状态、车辆是否空闲、车辆目标的位置,其中当前的状态包含:停止、行驶及转弯三种状态;
[0033]
本发明中的“固定路径”是指两站点间的固定行驶路径,即拓扑地图中两节点间的边,车辆在起始站点上料,上料完成后,沿由固定路径构成的行驶路径行驶至任务站点,在任务站点进行下料,结合图2进行说明,p1站点为起始站点,p5站点为任务站点,固定行驶路径为站点p1与站点p4间的路段,站点p4与站点p5间的路段均为固定路径。车辆在对突然出现的障碍物进行避障时,车辆可能偏离固定路径,此时需要基于本发明提供的实时路径规划方法进行车辆的路径的规划。
[0034]
s3、确定固定路径上距当前位置最近的站点p1,基于astar算法规划站点p1到任务站点的最短路径r0;
[0035]
s4、计算当前位置p0与站点p1间的夹角θ,若abs(θ)>90
°
,执行步骤s5,若abs(θ)≤90
°
度,则执行步骤s6;
[0036]
在本发明实施例中,接收到车辆当前的位姿,由位置p0(x0,y0)及方向(angle)组成,假定当前位置p0在栅格地图中的坐标为(x0,y0),站点p1在栅格地图中的坐标为(x1,y1),那么当前位置p0与站点p1间的夹角θ的计算公式具体如下:
[0037][0038]
其中,angle为车辆当前位置中的方向,在夹角θ大于90度时,说明站点p1处于行驶路径的后方,若将站点p1纳入规划路径中,则车辆将需要掉头行驶,为了避免车辆掉头行驶,因此需要当前位置p0与站点p1间的夹角θ小于90度。
[0039]
s5、将站点p1在路径r0中的下一站点p2作为起始点,基于astar算法规划站点p2到任务节点ps的最短路径r1,再基于astar算法规划当前位置p0到站点p2的最短行驶路径r2,路径r2与路径r1的拼接即形成当前位置p0到任务站点ps的行驶路径r;
[0040]
s6、基于astar算法直接规划站点p1到任务站点ps的最短行驶路径r3,再基于astar算法规划当前位置p0到站点p1的最短行驶路径r4,路径r3与路径r4的拼接即形成当前位置p0到任务站点的行驶路径r。
[0041]
在本发明实施例中,在步骤s6之后还包括:
[0042]
s7、在路径规划完毕后,更新当前车辆的路段值,基于车辆的路段权值来更新规划路径中各路段的长度,针对规划路径中的路段而言,更新后的路段长度=初始路段长度+路段权值*初始路段长度。
[0043]
假定车辆a的规划路径依次由路段1、路段2及路段3组成,其中路段1、路段2及路段
3的初始长度分为:5m、8m和10m,假定当前车的路段权值为,0.1,按照设定的步长(例如步长为0.1)更新路段权值,路段权值更新为0.2,那么更新后的规划路径为:路段1长度为6m、路段2的长度为9.6m及路段3的长度为12m,路径经过的车辆越多,其在栅格地图中的长度就会越长,在进行全局最短路径规划时,其被选中作为行驶路段的概率就会变小,进而减小路段堵塞的概率。
[0044]
在本发明实施例中,车辆在行驶过程中,实时检测车辆当前位置是否为站点位置,若当前位置为站点位置,则判断下一行驶路段上的车辆数量,若下一路段上的车辆数量大于数量阈值,则下一路段进行标记为不通,以当前位置为起点,重新规划当前位置到任务站点的最短行驶路径,基于重新规划的最短行驶路径进行行驶,同时针对重新规划的最短行驶路径执行步骤s7;若下一路段上的车辆数量小于等于数量阈值,则车辆基于初次规划的路径继续行驶,若当前位置不是站点位置,则车辆基于初次规划的路径继续行驶。
[0045]
本发明通过实时检测下一路段上的车辆数量,在下一路段上的车辆数过多时,将下一路段标记为不通后,基于当前位置重新进行最短路径规划,二次最短路径规划存在两种结果,一是不存在当前位置到任务站点的行驶路径,则基于在前规划的最短行驶路径进行行驶,而是存在当前位置到任务站点的行驶路径,则车辆基于二次规划的行驶路径进行行驶,以减小下一路段的车流量,减小车辆在下一段堵塞的风险。
[0046]
本发明是通过全局规划时的路段长度更新加上局部路径上的车辆数量监控来最大程度上减少交通堵塞的风险。
[0047]
本技术的实施例还提供了一种agv,agv包括:处理器和存储器,所述存储器中存储有至少一条指令、至少一段程序、代码集或指令集,所述至少一条指令、所述至少一段程序、所述代码集或指令集由所述处理器加载并执行以实现上述实时路径规划方法。
[0048]
上面结合附图对本发明进行了示例性描述,显然本发明具体实现并不受上述方式的限制,只要采用了本发明的方法构思和技术方案进行的各种非实质性的改进,或未经改进将本发明的构思和技术方案直接应用于其它场合的,均在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1