多组游标码盘、光电编码器及光源位置解算方法与流程
1.本发明涉及编码器技术领域,尤其涉及一种多组游标码盘、光电编码器及光源位置解算方法。
背景技术:
2.随着工控技术的飞速发展,制造业产业升级的不断推进,为伺服产业的发展提供了巨大的市场。编码器作为伺服系统中的反馈器件,有效提高了其工作精度。而绝对型旋转编码器,因其每一个位置绝对唯一、抗干扰,已经越来越广泛地应用于各种工业系统中的角度、长度测量和定位控制。伴随着对高精度加工的需求,对编码器的有效分辨率也提出了重大的技术要求。
3.一般的光电编码器在码盘上只刻画一组游标码道,而相同面积的码盘上,码道越多则码道越窄,码道过窄会导致模拟信号对光信号高度敏感,加上数目转换本身误差和电路噪声的影响,转换过后的结果即使与真实值仅有微小误差,在游标中的码道过于密集的情况下,也会造成绝对位置错误。目前市场上物理分辨率高的光电编码器在计算光源在码盘上的位置时,均存在绝对位置解算错误的问题。
4.上述内容仅用于辅助理解本发明的技术方案,并不代表承认上述内容是现有技术。
技术实现要素:
5.本发明的主要目的在于提供一种多组游标码盘、光电编码器及光源位置解算方法,旨在解决现有技术中物理分辨率高的光电编码器在计算光源在码盘上的位置时,均存在绝对位置解算错误的技术问题。
6.为实现上述目的,本发明提出一种多组游标码盘,所述多组游标码盘包括:以所述多组游标码盘的旋转中心为圆心的游标圆环,所述游标圆环包括多个首尾连接的游标组;
7.所述游标圆环的环内和/或环外设置有与所述游标组数量相同的辨识码道,各辨识码道的起始端之间存在第一相位差,所述各辨识码道的起始端与对应的游标组的起始端之间存在第二相位差。
8.可选地,所述游标组包括以所述多组游标码盘的旋转中心为圆心设置的主码道、游标码道以及段码道。
9.可选地,所述多个游标组包含第一游标组和第二游标组,所述第一游标组的起始端与所述第二游标组的终点端连接;
10.所述第一游标组设置在所述多组游标码盘的零点刻线的一侧,第二游标组设置在所述多组游标码盘的零点刻线的另一侧。
11.可选地,所述辨识码道包含:第一辨识码道和第二辨识码道;
12.所述第一辨识码道的起始端相对所述第一游标组的起始端顺时针或逆时针旋转所述预设角度设置;
13.所述第二辨识码道的起始端相对所述第二游标组的起始端顺时针或逆时针旋转所述预设角度设置。
14.可选地,所述第一辨识码道的起始端相对所述第一游标组的起始端顺时针旋转所述预设角度设置;
15.所述第二辨识码道的起始端相对所述第二游标组的起始端逆时针旋转所述预设角度设置。
16.可选地,所述第一辨识码道设置在所述游标圆环的环外,所述第二辨识码道设置在所述游标圆环的环内。
17.此外,为实现上述目的,本发明还提供了一种光电编码器,所述光电编码器包括上述的多组游标码盘。
18.此外,为实现上述目的,本发明还提供了一种光源位置解算方法,所述光源位置解算方法包括:
19.获取光源所处游标组中主码道的当前主模拟量和游标码道的当前游标模拟量;
20.根据所述当前主模拟量和所述当前游标模拟量确定所述光源在所述光源所处游标组中的初始位置信息;
21.获取各辨识码道的电平状态信息;
22.根据所述电平状态信息和所述初始位置信息确定所述光源所处的游标组信息;
23.根据所述初始位置信息和所述游标组信息确定所述光源在码盘上的目标位置信息。
24.可选地,所述根据所述当前主模拟量和所述当前游标模拟量确定所述光源在所述光源所处游标组中的初始位置信息的步骤包括;
25.根据所述当前主模拟量和所述当前游标模拟量确定所述主码道和所述游标码道之间的码道相位差;
26.根据所述码道相位差、所述当前主模拟量和所述当前游标模拟量确定所述光源所处游标组中的初始位置信息。
27.可选地,所述根据所述码道相位差、所述当前主模拟量和所述当前游标模拟量确定所述光源所处游标组中的初始位置信息的步骤之前,还包括:
28.获取所述码器指针所处游标组中段码道的当前段模拟量;
29.相应的,所述根据所述码道相位差、所述当前主模拟量和所述当前游标模拟量确定所述光源所处游标组中的初始位置信息的步骤包括:
30.根据所述码道相位差、所述当前段模拟量、所述当前主模拟量和所述当前游标模拟量确定所述光源所处游标组中的初始位置信息。
31.本发明中提供一种多组游标码盘、光电编码器及光源位置解算方法,该多组游标码盘包括:以所述多组游标码盘的旋转中心为圆心的游标圆环,所述游标圆环包括多个首尾连接的游标组;所述游标圆环的环内和/或环外设置有与所述游标组数量相同的辨识码道,各辨识码道的起始端之间存在第一相位差,所述各辨识码道的起始端与对应的游标组的起始端之间存在第二相位差。在本发明中,通过增加游标组的数目以及设置辨识码道,通过游标组确定光源在所处游标组上的初始位置,然后根据辨识码道和初始位置确定光源在码盘上的目标位置,可以更加准确的结算处光源在多组游标码盘上的准确位置。
附图说明
32.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
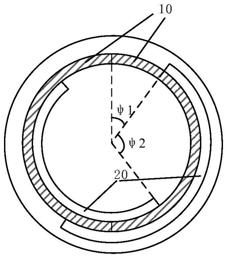
33.图1为本发明多组游标码盘第一实施例的结构示意图;
34.图2为本发明多组游标码盘第二实施例的第一种结构示意图;
35.图3为本发明多组游标码盘第二实施例中游标组连接示意图;
36.图4为本发明多组游标码盘第二实施例的第二种结构示意图;
37.图5为本发明多组游标码盘第二实施例的第三种结构示意图;
38.图6为本发明光源位置解算方法第一实施例的流程示意图;
39.图7为本发明光源位置解算方法第二实施例的流程示意图。
40.附图标号说明:
41.标号名称标号名称10游标组20辨识码道30零线110第一游标组120第二游标组210第一辨识码道220第二辨识码道101游标码道102主码道103段码道a第一识别区b第二识别区c第三识别区d第四识别区ψ1第一相位差ψ2第二相位差
42.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
43.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
45.参照图1,图1为本发明多组游标码盘第一实施例中第二电极层结构示意图。
46.在本实施例中,所述多组游标码盘包括:以所述多组游标码盘的旋转中心为圆心的游标圆环,所述游标圆环包括多个首尾连接的游标组10;
47.所述游标圆环的环内和/或环外设置有与所述游标组数量相同的辨识码道20,各辨识码道的起始端之间存在第一相位差ψ1,所述各辨识码道的起始端与对应的游标组10的起始端之间存在第二相位差ψ2。
48.需要说明的是,光电编码器的码盘通常包括一个游标组10,在对编码器的精度进行调节时需要增加该游标组中的码道数目。在游标组10的面积不变的情况下,增加码道的数目往往会减少码道的宽度,使码道更加密集导致码道内的模拟信号对光源信号十分敏感。
49.应理解的是,游标圆环是由多个首尾连接的游标组10组成的圆环结构。该游标组
10的数目可以是两个、三个、四个等。在本方案中,游标组10可以包括游标码道和主码道。游标是一种可游动的测微标尺。码盘上的游标组10利用游标码道和主码道之间的相位差实现对照射在码盘上的光源位置进行准确测量。游标组的具体使用方法与游标卡尺相同,具体原理可参照游标卡尺此处不再赘述。
50.在本实施例中,各个辨识码道的起始端与对应的游标组10的起始端之间的第二相位差ψ2可以相同也可以不同,具体的可以根据实际情况确定,本说明书实施例对此不作限定。各辨识码道的起始端与对应的游标组10的起始端之间的第二相位差ψ2可以用于将游标组10与辨识码道20在码盘上对应的角度位置信息进行区分。上述第二相位差ψ2可以为大于0的数值,例如:45度、60度、90度、180度等,具体的可以根据实际情况确定,本说明书实施例对此不作限定。
51.在本实施例中,辨识码道20可用于将码盘等分为多个区域,进而确定游标组10在码盘上的位置。在光源透过码盘在马盘上留下的痕迹处于辨识码道20上时,包括该痕迹的辨识码道20与不包括痕迹的辨识码道会输出不同的信号。例如该痕迹处于第一个辨识码道时,第一个辨识码道可以输出高电平信号,其他辨识码道则输出低电平信号。辨识码道20可以均设置在游标圆环的内侧或外侧,当然游标码道也可以分别设置,一部分设置在游标圆环的内侧,另一部分设置在游标圆环的外侧。辨识码道无需进行模数转换,可以通过将信号接入比较器电路,识别出当前的当前辨识码道对应的状态即可。辨识码道的状态可以是明状态和暗状态,或者高电平状态和低电平状态等。
52.在本实施例中,各个辨识码道在码盘上占据的角度可以是相同的,也可以是不同的,具体的可以根据实际情况确定,本说明书实施例对此不作限定。上述各相邻辨识码道的起始端之间存在第一相位差ψ1,各相邻辨识码道的起始端之间的第一相位差ψ1可以相同也可以不同,上述第一相位差ψ1可以为大于0的数值,例如:45度、60度、90度、180度等,具体的可以根据实际情况确定,本说明书实施例对此不作限定。
53.在具体实施中,光源透过码盘照射到pcb板时,会在码盘上留下一定的光源痕迹。透过多游标组码盘的光源痕迹一定处于一个确定的游标组10上,可以利用该游标组10对光源痕迹的位置进行测量,从而确定该光源痕迹在该游标组10上的初始位置信息。获取各个辨识码道20换分的电平状态信息,根据电平状态信息确定光源对应的痕迹所处的辨识码道20,不同的辨识码道20对应在码盘上对应不同的区域,根据该区域对应的区域位置信息结合游标组上光源的痕迹的初始位置信息便可以确定光源在码盘上痕迹的精确位置。
54.在一个实施例中,例如码盘上设置三个游标组10和三个辨识码道20,其中第一个游标组在码盘上以零线为起点占据0-120度的120度扇形区域,第二个游标组占据120-240度的120度扇形区域,第三个游标组占据240-360度的120扇形区域。三个辨识码道的起始端相对于对应位置的游标组的起始端均间隔60度,此时第一个辨识码道占据60-180度的120度扇形区域,第二个辨识码道占据180-300度的120度扇形区域,第三个辨识码道占据300-360度以及0-60度的120度扇形区域。在对光源的痕迹位置进行确定时,可以根据光源的痕迹所处的游标组对光源在该游标组上的位置进行确定,例如光源的痕迹位于该游标组的80度的初始位置;然后获取辨识码道的状态,若此时第三个辨识码道输出高电平信号,其余两个辨识码道均输出低电平信号,则该光源的痕迹处于第三辨识码道对应的区域。第三个辨识码道对应的区域为300-360度以及0-60度的120度扇形区域,其中第三个辨识码道对应的
300-360度属于第三游标组的60-120度,第三个辨识码道对应的0-60度属于第一游标组的0-60度,光源的痕迹位于该游标组的80度位置,因此可以确定该光源的痕迹位于第三游标组,并且为与第三游标组的80度位置,结合码盘上的具体位置便可得到该光源的痕迹对应的目标位置为零线顺时针旋转的320度位置处。
55.其中,初始位置为光源透过码盘的痕迹在对应的游标组上的位置,目标位置则是光源的痕迹在码盘上的具体位置。
56.在本实施例中提供了一种多组游标码盘,该多组游标码盘包括:以所述多组游标码盘的旋转中心为圆心的游标圆环,所述游标圆环包括多个首尾连接的游标组;所述游标圆环的环内和/或环外设置有与所述游标组数量相同的辨识码道,各辨识码道的起始端之间存在第一相位差,所述各辨识码道的起始端与对应的游标组的起始端之间存在第二相位差。在本实施例中,通过增加游标组的数目以及设置辨识码道,通过游标组确定光源在所处游标组上的初始位置,然后根据辨识码道和初始位置确定光源在码盘上的目标位置,可以更加准确的结算处光源在多组游标码盘上的准确位置。
57.基于上述多组游标码盘的第一实施例,提出本发明多组游标码盘的第二实施例。
58.在本实施例中,所述游标组包括以所述多组游标码盘的旋转中心为圆心设置的主码道101、游标码道102以及段码道103。
59.需要说明的是,主码道101和游标码道102是用于对光源的痕迹在游标组上的具体位置进行测量的两个码道。主码道101与游标码道之间的单位刻度存在一定的第一单位相位差。段码道103是与游标码道102之间存在一定第二单位相位差的码道。此处通过设置主码道101、游标码道102以及段码道103相当于同时使用多把游标卡尺对物体进行测量,可以更加准确的得到光源的痕迹的初始位置。在具体实施中,可以通过主码道101、游标码道102以及段码道103利用游标卡尺测距的原理对光源的痕迹在当前游标组上的初始位置。
60.参照图2,在本实施例中,所述多个游标组10包含第一游标组110和第二游标组120,所述第一游标组110的起始端与所述第二游标组120的终点端连接;
61.所述第一游标组110设置在所述多组游标码盘的零点刻线30的一侧,第二游标组120设置在所述多组游标码盘的零点刻线30的另一侧。
62.所述辨识码道20包含:第一辨识码道201和第二辨识码道220;
63.所述第一辨识码道210的起始端相对所述第一游标组110的起始端顺时针或逆时针旋转所述预设角度设置;所述第二辨识码道220的起始端相对所述第二游标组120的起始端顺时针或逆时针旋转所述预设角度设置。
64.需要说明的是,在图2中通过以设置两个游标组以及两个游标码道进行说明。在图2中优选的,第一辨识码道210可以与对应的第一游标组110的起始端顺时针旋转预设角度设置,第二辨识码道220与对应的第二游标组120的起始端同样顺时针旋转预设角度设置;当然,第一辨识码道210也可以与对应的第一游标组110的起始端逆时针旋转预设角度设置,第二辨识码道220可以与对应的第二游标组120的起始端同样逆时针旋转预设角度设置。在一些实施例中,还可以采用其它可能的方式设置第一辨识码道210和第二辨识码道220,具体的可以根据实际情况确定,本说明书实施例对此不作限定。
65.在一个实施例中,第一游标组110可以在码盘上以零点刻线30为起点占据0-180度的180度扇形区域,第二游标组120可以占据180-360度的180度扇形区域。两个辨识码道的
起始端相对于对应位置的游标组的起始端均滞后45度,当然也可是其他角度,此处不做具体限定,此时第一个辨识码道占据45-225度的180度扇形区域,第二个辨识码道占据225-360度以及0-45度的180度扇形区域。在对光源的痕迹位置进行确定时,可以根据光源的痕迹所处的游标组对光源在该游标组上的位置进行确定,例如光源的痕迹位于该游标组的120度的初始位置;然后获取辨识码道的状态,若此时第一个辨识码道210输出高电平信号,第二辨识码道220输出低电平信号,则该光源的痕迹处于第一辨识码道210对应的区域45-225度。其中45-180度属于第一游标组110对应的区域,180-225度属于第二游标组120对应的0-45度,此时初始位置为120度,则该光源的痕迹处于第一游标组110上,并且处于第一游标组110的120度处,进而确定该光源的痕迹在多组游标码盘上的目标位置为120度处。
66.参照图3,在本实施例中,所述第一游标组110设置在所述零点刻线30的右侧,第二游标组120设置在所述零点刻线30的左侧,第一游标组110的起始端与第二游标组120的终点端在零点刻线30处连接。
67.参照图4,在本实施例中,所述第一辨识码道210的起始端相对所述第一游标组110的起始端顺时针旋转所述预设角度设置;所述第二辨识码道220的起始端相对所述第二游标组120的起始端逆时针旋转所述预设角度设置。在本实施例中,所述第一辨识码道设置在所述游标圆环的环外,所述第二辨识码道设置在所述游标圆环的环内。当然可以理解的是,在一些实施例中,第一辨识码道也可以设置在游标圆环的环内,第二辨识码道设置在所述游标圆环的环外,具体的可以根据实际情况确定,本说明书实施例对此不作限定。
68.在具体实施中,可参照图5,第一辨识码道210以及第二辨识码道220将多组游标码盘等分位四个区域,第一识别区a、第二识别区b、第三识别区c以及第四识别区d。此处需要说明的是,第一辨识码道210和第二辨识码道220均不包括第一识别区a,但第一识别码道210和第二识别码道220均包括第三识别区d。在第一辨识码道210和第二辨识码道220均输出低电平时,光源在码盘上的痕迹处于第一辨识区域a内;当第一辨识码道210输出高电平、第二辨识码道220输出低电平时,光源在码盘上的痕迹处于第二辨识区域b;在第一辨识码道210和第二辨识码道220均输出高电平时,光源在码盘上的痕迹处于第三辨识区域c内;当第一辨识码道210输出低电平、第二辨识码道220输出高电平时,光源在码盘上的痕迹处于第四辨识区域d内。当光源在码盘上的痕迹处于第二辨识区域b内时,可直接表明光源的痕迹处于第一辨识码道210;同理,当光源在码盘上的痕迹处于第四辨识区域d内时,可直接表明光源的痕迹处于第二辨识码道220。当光源的痕迹处于第一识别区域a或第四识别区域d时,需要根据光源的痕迹在对应游标组上的初始位置进行确定。例如在预设区域为45度时,在第一识别区域a内,若初始位置处于0-45度之间,则光源的痕迹处于第一识别区域;若初始位置处于135-180度之间,则光源的痕迹处于第二识别区域。在第三识别区域c内同样弱磁,此处不做赘述。
69.本实施例提供了一种多组游标码盘,该多组游标码盘包括:以所述多组游标码盘的旋转中心为圆心的游标圆环,所述游标圆环包括多个首尾连接的游标组;所述游标圆环的环内和/或环外设置有与所述游标组数量相同的辨识码道,各辨识码道的起始端之间存在第一相位差所述各辨识码道的起始端与对应的游标组的起始端之间存在第二相位差。在本实施例中,通过增加游标组的数目以及设置辨识码道,通过游标组确定光源在所处游标组上的初始位置,然后根据辨识码道对应的区域和初始位置确定光源在码盘上的目标位
置,可以更加准确的结算处光源在多组游标码盘上的准确位置。
70.此外,为实现上述目的本发明还提供了一种光电编码器,所述光电编码器包括如上述的多组游标码盘。该多组游标码盘的具体结构参照上述实施例,由于光电编码器采用了上述所有实施例的全部技术方案,因此至少具有上述实施例的技术方案所带来的所有有益效果,在此不再一一赘述。
71.此外,为实现上述目的本发明还提供了一种光源位置解算方法,参照图6,图6为本发明光源位置解算方法的第一实施例的流程示意图,基于图6本发明还提出一种光源位置解算方法的第一实施例。
72.在本实施例中所述多组游标码盘制作方法包括:
73.步骤s10:获取光源所处游标组中主码道的当前主模拟量和游标码道的当前游标模拟量。
74.需要说明的是,当前主模拟量是指当前状态下主码道上模拟出的具体量化值。当前游标模拟量是指当前状态下游标码道上模拟出的具体量化值。当前主模拟量相当于游标卡尺中主尺的量值,当前游标模拟量相当于游标尺的量值。
75.在具体实施中,可以直接通过光源的痕迹在多组游标码盘上对应的刻度位置直接对当前主模拟量和当前游标模拟量进行获取,当然也可以通过其他方式进行获取,具体方式不做限定。
76.步骤s20:根据所述当前主模拟量和所述当前游标模拟量确定所述光源在所述光源所处游标组中的初始位置信息。
77.需要说明的是,初始位置信息是指光源的痕迹在所处的游标组中的位置信息。在本实施例中,在获取到当前主模拟量和当前游标模拟量时,可以直接通过游标组的计算方式计算光源的痕迹在所处游标组中的初始位置信息。游标组的计算方式与游标卡尺的计算方式相同,此处不做赘述。
78.步骤s30:获取各辨识码道的电平状态信息。
79.需要说明的是,电平状态信息是用于体现各辨识码道当前状态的信息。电平状态信息可以是辨识码道对应的高电平状态或低电平状态,也可以是辨识码设置的发光设备的点亮状态或熄灭状态。
80.在具体实施中,可以通过万用表对电平状态信息进行采集,当然也可以通过对个辨识码道的明亮的状态进行采集确定电平状态信息。
81.步骤s40:根据所述电平状态信息和所述初始位置信息确定所述光源所处的游标组信息。
82.需要说明的是,在本实施例中可以将采集到的各辨识码道对应的电压值分别输入比较器的一个输入端,在比较器的另一个输入端设置一个参考电压,根据比较器的输出结果确定各辨识码道的电平状态信息。例如第一辨识码道210对应的电压值信息的电压值大于参考电压,此时比较器输出高电平信号,则表明光源的痕迹处于第一辨识码道210;第二辨识码道220对应的电压值信息的电压值小于参考电压,此时比较器输出低电平信号,则表明光源的痕迹不处于第二辨识码道220。当然在一个辨识码道包括两个游标组的位置时,可以根据初始位置信息确定光源的痕迹具体处于那个游标组。
83.步骤s50:根据所述初始位置信息和所述游标组信息确定所述光源在码盘上的目
标位置信息。
84.需要说明的是,目标位置信息是指光源透过多组游标码盘的痕迹在码盘上的位置信息。在具体实施中,在确定光源的痕迹所处的游标组上的初始位置信息以及确定具体的游标组的情况下,可以根据各个游标组对应的码盘上的区域确定光源的痕迹在多组游标码盘上的具体位置。
85.在本实施例中提供了一种光源位置解算方法,该光源位置解算方法通过获取光源所处游标组中主码道的当前主模拟量和游标码道的当前游标模拟量;根据所述当前主模拟量和所述当前游标模拟量确定所述光源在所述光源所处游标组中的初始位置信息;获取各辨识码道的电平状态信息;根据所述电平状态信息和所述初始位置信息确定所述光源所处的游标组信息;根据所述初始位置信息和所述游标组信息确定所述光源在码盘上的目标位置信息。在本实施例中,通过增加游标组的数目以及设置辨识码道,可以基于多个游标组确定光源在所处游标组上的初始位置,进一步的,可以根据辨识码道和初始位置确定光源在码盘上的目标位置,可以更加准确的解算光源在多组游标码盘上的准确位置。
86.基于上述光源位置解算方法的第一实施例,提出本发明光源位置解算方法的第二实施例。
87.在本实施例中,所述步骤s20包括:
88.步骤s201:根据所述当前主模拟量和所述当前游标模拟量确定所述主码道和所述游标码道之间的码道相位差。
89.需要说明的是,码道相位差是指主码道的单位相位与游标码道单位相位之间的差值。在确定主码道与游标码道的单位个数时,可以直接通过计算得到主码道的单位相位以及游标码道的单位相位,并根据主码道的单位相位和游标码道的单位相位进行运算得到码道相位差。
90.步骤s202:根据所述码道相位差、所述当前主模拟量和所述当前游标模拟量确定所述光源所处游标组中的初始位置信息。
91.需要说明的是,在确定码道相位差、当前主模拟量和当前游标模拟量时,相当于直接获取到游标卡尺的主尺测量、游标尺测量值以及游标卡尺的单位精度,可以直接通过运算获取到光源的痕迹在所处游标组中的初始位置信息。
92.其中,所述步骤s202之前还包括:
93.步骤s2021:获取所述码器指针所处游标组中段码道的当前段模拟量。
94.需要说明的是,当前段模拟量是指当前段码道模拟出的量化值。通过当前段模拟量的获取结合当前主模拟量以及当前游标模拟量可以更加准确的获取到光源的痕迹在所处游标组中的初始位置信息。
95.相应的,步骤s202包括:
96.步骤s202':根据所述码道相位差、所述当前段模拟量、所述当前主模拟量和所述当前游标模拟量确定所述光源所处游标组中的初始位置信息。
97.在本实施例中提供了一种光源位置解算方法,该光源位置解算方法通过获取光源所处游标组中主码道的当前主模拟量和游标码道的当前游标模拟量;根据所述当前主模拟量和所述当前游标模拟量确定所述光源在所述光源所处游标组中的初始位置信息;获取各辨识码道的电平状态信息;根据所述电平状态信息和所述初始位置信息确定所述光源所处
的游标组信息;根据所述初始位置信息和所述游标组信息确定所述光源在码盘上的目标位置信息。在本实施例中,通过增加游标组的数目以及设置辨识码道,通过在游标组中引入段码道更加准确的确定光源在所处游标组上的初始位置,然后根据辨识码道和初始位置确定光源在码盘上的目标位置,可以更加准确的结算处光源在多组游标码盘上的准确位置。
98.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
99.显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
100.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
101.另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当人认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1