定位装置及其系统的制作方法
1.本专利涉及激光定位技术领域。
背景技术:
2.目前在电动卡车换电领域,电池箱采用双固定式激光器进行定位,可在专用换电站内完成定位。双固定式激光器安装于换电电池箱左侧,换电电池箱的定位方式采用侧向固定式激光器定位,侧向固定式激光器定位需要在换电站内布置2个激光器,激光器间距小于换电电池箱宽度,安装在换电站电池箱侧面墙内并固定。通过2个激光器测得距离换电电池箱的数据,可以得到换电电池箱y向定位尺寸。由于这种定位方式,换电设备只能判断换电电池箱单方向的位置,定位精度低,成本高,对司机车辆停放要求高,后期运行可靠性低,对换电运行造成困扰,造成不必要的换电时间,也减少了换电站的最大服务车辆。
3.因此,市场上需要开发一种新的激光扫描车辆定位装置。
技术实现要素:
4.针对现有技术中的缺陷,本专利的目的是提供一种激光扫描车辆定位装置。
5.根据本专利提供的一种定位装置,用于对重卡车身停止位置进行定位测量,包括定位激光器、红外线支架、步进电机、步进电机支架;所述步进电机设置于步进电机支架下,为定位激光器转动提供动力;所述定位激光器固定于红外线支架上,并能随着红外线支架一起转动;所述红外线支架固定于步进电机的中心轴上,用于支撑定位激光器并能随着步进电机中心轴的一并转动。进一步地,还包括红外线支架压板,其用于与红外线支架一起固定于步进电机中心轴上。
6.本专利的第二目的是提供了一种定位装置的系统,包括第一定位装置和第二定位装置;所述第一定位装置的步进电机中心轴转动平面与第二定位装置的步进电机中心轴动平面不平行。
7.进一步地,所述第一定位装置的步进电机中心轴转动平面与第二定位装置的步进电机中心轴转动平面垂直。
8.与现有技术相比,本发明具有如下至少一种的有益效果:
9.本专利的上述装置,采用激光器进行扫描,通过在换电电池箱侧面布置2个支架进行激光器旋转扫描,由于支架结构简单,体积小,使定位装置成本降低,可靠性增加。同时通过激光器的水平方向旋转,对多个点位进行扫描,通过简单计算,可以定位车辆x向、y向位置信息,并确定车辆的偏转角度,提高了定位精度和维度。另外增加测距激光器,控制换电时吊具的下降高度,避免不必要的碰撞磨损,延长使用寿命,可靠性高。
附图说明
10.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
11.图1a为本发明一优选实施例中的激光扫描车辆定位装置的轴测图;
12.图1b为本发明一优选实施例中的激光扫描车辆定位装置的主视图;
13.图1c为本发明一优选实施例中的激光扫描车辆定位装置的侧视图;
14.图2为本发明一优选实施例中的卡车车身的侧视图;
15.图3a为本发明一优选实施例中的定位激光器测得的函数图;
16.图3b为本发明一优选实施例中的测距激光器测得的函数图;
17.图3c为本发明一优选实施例中的定位激光器二次计算的位置函数图;
18.图4a为本发明一优选实施例中的定位激光器的扫描范围图;
19.图4b为本发明一优选实施例中的测距激光器的扫描范围图;
20.图5a为本发明一优选实施例中的支架的轴测图;
21.图5b为本发明一优选实施例中的支架的主视图;
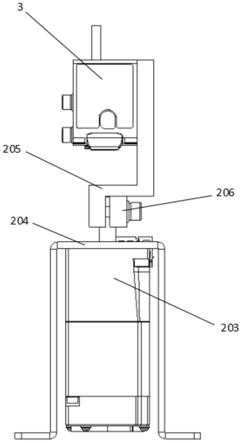
22.图中标记分别表示为:1为重卡车身、2为支架、3为定位激光器、4为测距激光器、101为换电电池箱、201为横向支架、202为纵向支架、203为步进电机、204为步进电机支架、205为红外线支架、206为红外线支架压板、s1为定位激光器扫描范围、s2为测距激光器扫描范围。
具体实施方式
23.下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
24.参照图1a、1b及1c所示,为本发明一实施例激光扫描车辆定位装置的结构示意图,包括重卡车身1、支架2、定位激光器3、测距激光器4。
25.重卡车身1包括一个换电电池箱101,所述换电电池箱101设置于如图中所示位置,位于重卡车身1的前端且靠近车头,与重卡车身1前后存在间隙。
26.参照图1b、1c所示,支架2根据设置方向分为横向支架201和纵向支架202,2个支架结构相同。
27.参照图5a、5b所示,支架2包括步进电机203、步进电机支架204、红外线支架205、红外线支架压板206。步进电机203作为动力部件,设置于步进电机支架204下,通过4个螺栓与步进电机支架204固定,螺栓位于步进电机203的4个角上。红外线支架205,其位于步进电机支架204上侧并固定于步进电机203的中心轴上,用于支撑定位激光器3并能随着步进电机203中心轴的转动而转动;参照图5b所示,红外线支架压板206和红外线支架205一侧有圆弧切口,通过4个螺栓将步进电机203的中心轴固定在圆弧切口内,并能随着步进电机203的中心轴一起转动而不产生相对滑动,起到扭矩传递和连接的作用。
28.参照图1b、1c所示,横向支架201设置于换电电池箱101左侧,检测部件为定位激光器3。定位激光器3通过螺栓固定于红外线支架205,通过步进电机203提供动力与步进电机203的轴一起转动,实现对多个点位进行摆动扫描。
29.在一具体实施例中,定位激光器3在横向支架201上进行水平方向旋转时,每旋转1
°
进行一次距离测量,并将采集到的距离数据上传。参照图2、3a、4a所示,换电电池箱101与
重卡车身1前后存在间隙,定位激光器3在扫描范围s1内进行旋转时所测得距离会在换电电池箱两侧产生数据突变,根据此变化以及定位激光器3采集到的距离数据所形成的的函数图像,可以判断函数图像中a,b两点为换电电池箱101与前后间隙产生的数据突变点。参照图4a所示,将定位激光器3在每一点所测得距离作为直角三角形斜边d1结合其旋转角度α,通过三角函数sinα=l1/d1、cosα=d1/d1可以计算出两条直角边d1、l1的长度即每一个扫描点距离定位激光器3所在墙面的距离,借此可以形成以l1为y轴,更加直观的换电电池箱101俯视方向位置函数图像,参照图3c所示,根据定位激光器3二次计算形成的位置函数图像,可以精确定位换电电池箱101所处的x方向位置信息。
30.在一具体实施例中,参照图3a、4a所示,当重卡车身1以理想状态进入换电时,通过函数图像3a中a、b两点所对应的的旋转角度和测得距离数据,进行三角函数计算,所得出的换电电池箱101两端的y向距离l1和l2应当相等。在实际情况下,重卡车身1会产生方向偏转,导致换电电池箱101角度偏移,通过上述对定位激光3测得函数图像进行二次计算所得到的更直观的换电电池箱101位置函数图像,参照图3c所示,可以确认换电电池箱101的偏转角度和y方向位置信息。结合换电电池箱101的x、y方向位置信息和偏转角度可以判断该换电电池箱101是否处于可换电状态,并确认换电机器人需要移动的位置距离。
31.参照图1b、1c所示,纵向支架202设置于换电电池箱101左侧,检测部件为测距激光器。测距激光器在纵向支架202上进行竖直方向的旋转运动,对多个点位进行扫描
32.在一具体实施例中,测距激光器4在竖直方向旋转扫描时,每1
°
进行一次距离测量,并将采集到的距离数据上传。参照图3b、4b所示,测距激光器4在对换电电池箱101顶部从上至下进行旋转测量时,在扫描范围s2内所测得距离会在换电电池箱101顶端发生距离突变,根据此变化以及测距激光器4采集到的距离数据所形成的函数图像,可以判断函数图像中c点为数据突变点。由于纵向支架202安装位置以及测距激光器4旋转角度和该点所测得的距离数据确定,根据三角函数可以算出l3的长度,即可确定换电电池箱101所处的竖直方向位置信息,结合此信息可以控制换电时吊具的下降高度,避免不必要的碰撞磨损,延长使用寿命。
33.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变形或修改,这并不影响本发明的实质内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1