一种用于车架的检测系统的制作方法
1.本实用新型涉及产品检测技术领域,具体涉及一种用于车架的视觉检测系统。
背景技术:
2.车架是汽车底盘最重要的承重部件,结构非常复杂,尤其是对于客车和卡车,包括车桥、驾驶室、动力装置、车厢、车斗以及其他附件等几乎所有的部件都安装在车架上。车架通常由多条纵梁和横梁通过焊接、铆接等工艺组装而成,预装的连接件也会用铆钉或螺栓固定在对应的梁上。此外,还会为后续总装工序的其他附件预留很多不同尺寸的螺栓孔、铆钉孔等。通常,不同型号的汽车对应不同的车架型号,车企为适应残酷的市场竞争,满足客户的定制化需求,需要经常性的变更设计方案。尤其是大型车辆市场单一型号产品销量不大,因此,不同型号的车架需要混线生产。
3.目前大型车架车间装配线主要采用人工装配模式,多种型号混线生产经常发生错漏装情况,因此需要在产线末端设置专门的检测工站。检验人员对照设计图纸及工艺文件目视检查,极易因疲劳或粗心发生错漏检,一旦流到后工序会造成严重的质量问题和成本损失。
4.综上,为了避免人工检查可能存在的错漏判,适应多型号小批量生产节奏,现需要设计一种用于车架的视觉检测系统及检测方法。
技术实现要素:
5.为解决上述现有技术中问题,本实用新型提供了一种用于车架的视觉检测系统,实现了车架在检测线上可以自由通过检测工位,提高了环境适应性,保证了检测的准确性和稳定性。
6.为达到上述目的,本实用新型采用如下技术方案:
7.一种用于车架的视觉检测系统,包括:
8.地轨,与装有待测车架的工装车配合使用,用于运输待测车架;
9.支架,其跨设于所述地轨上;
10.图像采集处理模块,其固定于所述支架上;
11.其中,沿所述地轨方向设置若干个对射传感器;沿所述待测车架运行的方向,所述对射传感器设于所述图像采集处理模块的后方;
12.所述图像采集处理模块包括光源、图像采集单元和图像处理单元。
13.在本实用新型的一些实施例中,所述图像采集单元的视野宽度不小于相邻的所述对射传感器的间距。
14.在本实用新型的一些实施例中,所述若干个对射传感器的总跨度不小于所述待测车架的长度。
15.在本实用新型的一些实施例中,所述检测系统还包括遮光罩,其罩设于所述支架上,用于提供稳定的图像采集环境。
16.在本实用新型的一些实施例中,所述遮光罩的高度大于所述支架的高度。
17.在本实用新型的一些实施例中,所述支架包括顶梁和对称设置的支撑柱。
18.在本实用新型的一些实施例中,所述光源等间距的分布于所述顶梁与所述支撑柱上。
19.在本实用新型的一些实施例中,所述图像采集单元位于所述支撑柱的内侧。
20.在本实用新型的一些实施例中,所述检测系统还包括识别所述待测车架型号的读取单元;沿所述待测车架运行的方向,所述读取单元位于所述图像采集处理模块的前方。
21.在本实用新型的一些实施例中,所述对射传感器包括相对设置的两个光电传感器。
22.本实用新型的技术方案相对现有技术具有如下技术效果:
23.本实用新型通过在检测先的地轨两旁设置若干个对射传感器,能够在不影响流水线作业的情况下保证图像采集位置的准确性;适应于多种检测线速度。另外针对检测线上的众多车架型号,本实用新型中的图像采集处理模块能够通过简单的人工确认快速生成相应的车架的识别结果清单。大大降低了人工参与程度及对人员的技能要求。保证了检测的稳定性,对于各类在线防错检查需求具有广泛的适用性。
附图说明
24.为了更清楚地说明本实用新型实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
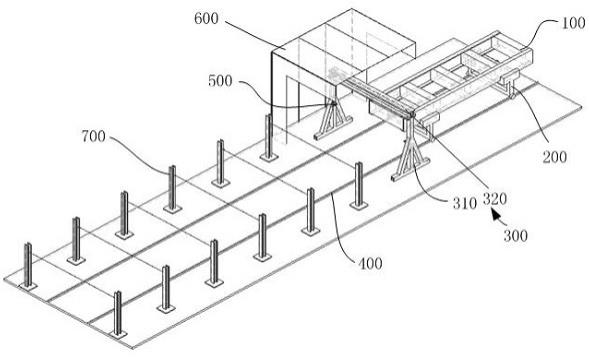
25.图1为所述检测系统的结构布局图。
26.附图标记:100-待测车架;200-工装车;300-支架;310-顶梁;320-支撑柱;400-地轨;500-图像采集处理模块;600-遮光罩;700-对射传感器。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
28.在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。在上述实施方式的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
29.参照图1所示,一种用于车架的视觉检测系统,包括:
30.地轨400,与装有待测车架100的工装车200配合使用,用于运输待测车架100;
31.支架300,其跨设于所述地轨400上;
32.图像采集处理模块500,其固定于所述支架300上;
33.其中,沿所述地轨400方向设置若干个对射传感器700;沿所述待测车架100运行的方向,所述对射传感器700设于所述图像采集处理模块500的后方;
34.所述图像采集处理模块500包括光源、图像采集单元和图像处理单元。
35.在本实用新型的一些实施例中,对于对射传感器700,其包括相对设置的两个光电传感器,一个用于发射光电信号,一个用于接收光电信号;当待测车架100经过该对射传感器700时,其中用于接收光电信号的光电传感器出现信号中断,即向图像采集处理模块500发送触发信号,然后图像采集单元开始对待测车架100进行图像采集。对于已经出现过信号中断的对射传感器700,图像采集处理模块500不再对其进行识别。
36.对射传感器700在沿地轨400方向等间距设置,具体地是按照间距l布置n套对射传感器700,对射传感器700的总跨度为l*n,其大于待测车架100的总长度。在该检测线上无需对工装车200的速度进行控制,多个对射传感器700能够灵敏的识别工装车200经过的位置,并及时触发图像采集处理模块500进行图像采集。
37.在本实用新型的一些实施例中,对于支架300来说,所述遮光罩600的高度大于所述支架300的高度。所述支架300包括顶梁310和对称设置的支撑柱320。所述光源等间距的分布于所述顶梁310与所述支撑柱320上。所述图像采集单元位于所述支撑柱320的内侧。
38.在本实用新型的一些实施例中,所述检测系统还包括识别所述待测车架型号的读取单元;沿所述待测车架运行的方向,所述读取单元位于所述图像采集处理模块500的前方。
39.在本实用新型的一些实施例中,对于图像采集处理模块500,光源采用高均匀度的调光设置,图像采集单元采用高分辨率的工业相机和高清镜头组成。该图像采集处理模块固定在支架300上,具体地是图像采集单元对准检测线;另外,所述检测系统还包括遮光罩600,其罩设于所述支架300上,用于提供稳定的图像采集环境。光源位于该遮光罩600内,使得图像采集单元在拍照摄取待测车架的图片时,一直处于同一光亮度的拍摄环境中,能够得到待测车架100表面特征的清晰图像。
40.所述图像采集单元的视野宽度不小于相邻的所述对射传感器的间距。能够实现每次拍照得到的图像长度要大于待测车架100实际通过的长度。另外,所述若干个对射传感器700的总跨度不小于所述待测车架100的长度。确保了待测车架100全范围的检测,无遗漏。
41.由于待检测的铆钉、螺栓头、螺母、通孔等特征图像比较接近,通过图像或轮廓模板匹配的方式极易造成误判。所以图像处理单元是采用基于深度学习算法的智能图像处理及特征识别系统,相比普通图像处理及模板匹配的识别算法,具有更高的柔性和兼容性。通过预先对待检特征进行图样采集,尤其对斜面、阴影、部分遮挡等特殊工况的图像进行迭代训练,可以保证特征识别的准确性和稳定性。
42.在本实用新型的一些实施例中,所述检测系统的检测方法包括以下步骤:
43.s1、根据所述待测车架的型号信息,所述图像采集处理模块调取对应的检测程序;具体地是在待测车架100进入遮光罩600前,通过检测线上的扫码识别装置读取待测车架100的型号,然后将该型号同步到图像处理单元;该图像处理单元中保存有各个车架型号及其待检特征的标准数据,当图像处理单元接收到待测车架100的型号信息时,调取相应的检测程序,该检测程序包括目标车架需要被检测特征的标准图像以及该特征图像在拍摄图像视野范围内的理论坐标位置。
44.s2、所述待测车架100沿所述地轨400依次经过所述图像采集处理模块500和所述对射传感器700;参照图1所示,该图中工装车200是刚刚进入到遮光罩600内,待测车架100在检测线上的运动方向是先经过图像采集处理模块500,然后再依次经过各个对射传感器700。
45.s3、所述对射传感器700采集所述待测车架100的位置信息,该位置信息触发所述图像采集单元对所述待测车架100进行图像采集得到待测图像;每经过一组对射传感器700,图像采集单元就获取一个待测图像。因为图像采集单元的视野宽度w,即获取的待测图像中的部分待测车架100的宽度大于相邻对射传感器700的间距l,图像采集单元实现了全范围的覆盖,避免了图像采集的遗漏;使得流水线形式的检测线无需根据待测车架的情况进行检测线的速度调整。
46.s4、所述图像处理单元对采集的图像进行分析判断后输出检测结论;
47.具体地是图像处理单元提取待测图像中的特征数据,将其与标准特征数据进行对比。另外,所述图像处理单元还用于对特殊工况下待测图像进行迭代计算处理;所述特殊工况包括但不限于处于斜面、阴影或部分遮挡下采集的待测图像,因为车架中一般需要检测的是铆钉、螺栓头、螺母、通孔等特征图像比较接近,采用一般的图像或轮廓模板匹配的方式极易造成误判;本实施例中的方法可以保证特征识别的准确性和稳定性。
48.在本实用新型的一些实施例中,对于新型号待测车架进入检测线时,所述图像处理单元识别所述待测图像上的各类特征数据并输出识别结果清单,该识别结果清单包括xy坐标信息和特征类型信息。
49.所述图像处理单元用于存储所述待测车架的型号与所述识别结果清单的映射关系,即每个型号的车架均对应有该型号车架的识别结果清单。当图像处理单元接收到待测车架100的型号后,根据映射关系自动调取对应的识别结果清单,并与实际拍摄的图像所识别的特征数据进行对比,得出检测结论。
50.具体地是,车间组装线具有混线组装,品种多样的特点。本实用新型充分考虑型号兼容和快速生成检测清单的需求,采用基于深度学习算法的智能识别方法,步骤如下:
51.待测车架100在流水线运动,依次触发对射传感器700,并触发图像采集单元进行拍照;
52.图像处理单元对拍摄的图像进行处理分析,自动识别图像上的各类特征并输出识别结果清单,包括xy位置信息及特征类型信息;此处xy位置信息是指在拍摄的图像中,待测车架上被提取的特征在二维图像中的位置。特征类型信息是指待测车架上的各类螺钉、螺帽或铆钉的种类及其型号尺寸等。
53.检验人员只需对照图纸对输出的识别结果清单进行简单的确认,通过快速核对后,软件自动生成该型号车架的自动检测程序,与二维码车架型号信息关联并保存成固定清单;
54.后续该型号车架进入检测工位后,通过扫描二维码识别车架型号,自动调用该清单进行检测识别。
55.本实用新型具有以下技术效果:
56.对于车架等类似组装件或机加件的在线检测需求,利用本实用新型所述的检测系统可以实现快速在线防错检查,减少了人工检测时由于疲劳、粗心等主观因素带来的误判。
基于深度学习算法的ai检测方法相比传统的图像识别算法,提高了环境适应性,保证了检测的准确性和稳定性。对射传感器可以在不影响流水线作业的情况下保证拍照位置的准确性。对于车架组装线防错检查最大的技术难题是车架型号众多,且不断有新型号车架混入,本实用新型提出的智能识别方法通过简单的人工确认快速生成检测清单,大大降低了人工参与程度及对人员的技能要求。综上所述,该在线智能检测系统可以完美代替人工检测,同时,人工智能技术保证了检测的稳定性,快速生成检测清单使该系统拥有极高的柔性和实用性,开创了在线防错检测技术新纪元,对于各类在线防错检查需求具有广泛的适用性。
57.在上述实施方式的描述中,具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
58.以上仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1