一种基于车载超声传感器的车辆实时定位系统及车辆的制作方法
1.本实用新型属于车辆定位技术领域,尤其涉及一种基于车载超声传感器的车辆实时定位系统及车辆。
背景技术:
2.自主泊车系统是一种用于解决车辆从停车场入口到停车位之间的车辆自动驾驶的问题的系统,该系统通过车载运算单元以及车载的传感器实现对于环境的感知、路径避障、车位搜寻以及车位泊入等全自动功能。同时,为了实现停车场范围内的自主巡航,自主泊车系统需要一套停车场的高精地图,以及相应的实时定位系统。
3.自主泊车中的实时定位系统一般采用车载传感器,如环视相机、前视相机、毫米波雷达等,通过传感器提取的信息跟高精地图进行比对,实现对于车辆在高精地图中的定位,此过程中,基于相机和基于毫米波雷达等的定位可以有各种方案,比如基于相机的定位中常用的语义地图以及基于语义检测的视觉定位,毫米波和相机都可以采用的slam定位技术,更有甚者采用基于深度学习回归的端到端定位方案。但是采用相机的定位方案也有其局限性,比如定位能力和精度跟相机的安装位置、相机镜头参数等有关,因此无法适应缺乏语义和纹理,或者非常狭窄的场景,因物体离相机距离很近,不易被检测到。而基于毫米波的定位也会在车身周围留下一圈无法感知的盲区,从而无法应用于狭窄道路。
技术实现要素:
4.本实用新型实施例提供一种基于车载超声传感器的车辆实时定位系统及车辆,旨在解决背景技术中提出的问题。
5.本实用新型实施例是这样实现的,一种基于车载超声传感器的车辆实时定位系统,该系统包括数据库、车载超声传感器、传感器测量模型、标定模块、定位模块以及导航控制单元;
6.所述数据库用于存储狭窄上下坡道路的高精地图;
7.所述高精地图至少包括车道两旁的障碍物;
8.所述车载超声传感器用于发送第一超声信号,在所述第一超声信号触碰障碍物后反馈第二超声信号,并计算车辆与所述障碍物之间的距离信息;
9.所述传感器测量模型根据所述距离信息,获得对于超声fov内的障碍物概率分布;
10.所述标定模块用于对所述车载超声传感器的安装位置和超声fov进行标定,获得车辆周围障碍物的分布概率图;
11.所述定位模块用于将所述分布概率图与所述高精地图匹配,获取车辆当前位置。
12.优选的,所述车载超声传感器共设置有十二个,用于获取车辆与所述车辆周边的障碍物的距离信息。
13.优选的,所述车载传感器的安装位置为超声传感器在车辆坐标系下的安装位置和角度。
14.优选的,所述超声fov的标定通过pvc管在所述超声信号覆盖的范围内进行打点采样获得的包络图获取。
15.优选的,所述pvc管的直径为75mm。
16.优选的,所述车辆当前位置通过滤波算法将所述分布概率图与所述高精地图比对,迭代优化获得。
17.一种车辆,该车辆包括上述的系统。
18.本实用新型基于车载超声传感器,利用超声传感器探测车辆与车辆周边障碍物之间的距离数据,分析获取障碍物的概率部分,结合超声传感器的安装位置、较低和超声fov标定结果,获取车辆周围障碍物的分布概率图,将分布概率图与地图匹配,滤波迭代优化获得车辆当前位置,定位精确,适用于狭窄道路车辆定位。
附图说明
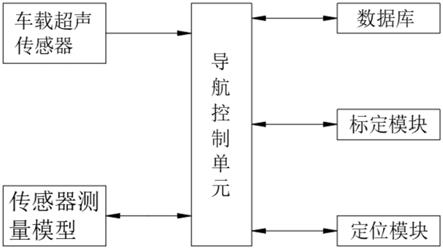
19.图1是一种基于车载超声传感器的车辆实时定位系统的系统架构图。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
21.本实用新型提供一种基于车载超声传感器的车辆实时定位系统及车辆,如图1所示,该系统包括数据库、车载超声传感器、传感器测量模型、标定模块、定位模块以及导航控制单元;
22.所述数据库用于存储狭窄上下坡道路的高精地图;
23.所述高精地图至少包括车道两旁的障碍物;
24.所述车载超声传感器用于发送第一超声信号,在所述第一超声信号触碰障碍物后反馈第二超声信号,并计算车辆与所述障碍物之间的距离信息;其中,所述车载超声传感器共设置有十二个,用于获取车辆与所述车辆周边的障碍物的距离信息。
25.所述传感器测量模型根据所述距离信息,获得对于超声fov内的障碍物概率分布;
26.所述标定模块用于对所述车载超声传感器的安装位置和超声fov进行标定,获得车辆周围障碍物的分布概率图;其中,所述车载传感器的安装位置为超声传感器在车辆坐标系下的安装位置和角度;所述超声fov的标定通过直径为75mm的pvc管在所述超声信号覆盖的范围内进行打点采样获得的包络图获取。
27.所述定位模块用于将所述分布概率图与所述高精地图匹配,通过滤波算法将所述分布概率图与所述高精地图比对,迭代优化获取车辆当前位置。
28.定位时,车载超声传感器发出第一信号,在第一信号触碰到障碍物后反馈第二信号至车载超声传感器,车载超声传感器根据自身标定位置以及第二信号反馈时间获取车辆与最近障碍物之间的距离信息;传感器模型根据距离信息获取对于超声fov内障碍物的概率分布,并根据车辆超声fov的标定结果,获取对超声fov内的障碍物分布概率图,最后由定位模块将障碍物分布概率图与地图数据进行匹配,滤波后输出车辆当前位置,完成车辆定位。
29.其次,本实用新型还提供一种车辆,该车辆包括上述的系统。
30.综上所述,本实用新型基于车载超声传感器,利用超声传感器探测车辆与车辆周边障碍物之间的距离数据,分析获取障碍物的概率部分,结合超声传感器的安装位置、较低和超声fov标定结果,获取车辆周围障碍物的分布概率图,将分布概率图与地图匹配,滤波迭代优化获得车辆当前位置,定位精确,适用于狭窄道路车辆定位。
31.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种基于车载超声传感器的车辆实时定位系统,其特征在于,所述系统包括数据库、车载超声传感器、传感器测量模型、标定模块、定位模块以及导航控制单元;所述数据库用于存储狭窄上下坡道路的高精地图;所述高精地图至少包括车道两旁的障碍物;所述车载超声传感器用于发送第一超声信号,在所述第一超声信号触碰障碍物后反馈第二超声信号,并计算车辆与所述障碍物之间的距离信息;所述传感器测量模型根据所述距离信息,获得对于超声fov内的障碍物概率分布;所述标定模块用于对所述车载超声传感器的安装位置和超声fov进行标定,获得车辆周围障碍物的分布概率图;所述定位模块用于将所述分布概率图与所述高精地图匹配,获取车辆当前位置。2.如权利要求1所述的基于车载超声传感器的车辆实时定位系统,其特征在于,所述车载超声传感器共设置有十二个,用于获取车辆与所述车辆周边的障碍物的距离信息。3.如权利要求1所述的基于车载超声传感器的车辆实时定位系统,其特征在于,所述车载超声传感器的安装位置为超声传感器在车辆坐标系下的安装位置和角度。4.如权利要求1所述的基于车载超声传感器的车辆实时定位系统,其特征在于,所述超声fov的标定通过pvc管在所述超声信号覆盖的范围内进行打点采样获得的包络图获取。5.如权利要求4所述的基于车载超声传感器的车辆实时定位系统,其特征在于,所述pvc管的直径为75mm。6.如权利要求1所述的基于车载超声传感器的车辆实时定位系统,其特征在于,所述车辆当前位置通过滤波算法将所述分布概率图与所述高精地图比对,迭代优化获得。7.一种车辆,其特征在于,所述车辆包括权利要求1-6任意一项所述的系统。
技术总结
本实用新型提供了一种基于车载超声传感器的车辆实时定位系统及车辆,属于车辆定位领域,该系统包括数据库、车载超声传感器、传感器测量模型、标定模块、定位模块以及导航控制单元。本实用新型基于车载超声传感器,利用超声传感器探测车辆与车辆周边障碍物之间的距离数据,分析获取障碍物的概率部分,结合超声传感器的安装位置、较低和超声FOV标定结果,获取车辆周围障碍物的分布概率图,将分布概率图与地图匹配,滤波迭代优化获得车辆当前位置,定位精确,适用于狭窄道路车辆定位。适用于狭窄道路车辆定位。适用于狭窄道路车辆定位。
技术研发人员:蒋如意 温加睿 马光林 于萌萌 田钧
受保护的技术使用者:上海追势科技有限公司
技术研发日:2021.05.29
技术公布日:2022/1/25
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1