皮带机物料体积实时测量系统的制作方法
1.本实用新型涉及物料体积测量的技术领域,尤其涉及一种皮带机物料体积实时测量系统。
背景技术:
2.随着矿山开采设备不断发展,各种大型“智能、高效、省人”的开采设备出现在矿山开采现场,开采效率也明显大幅度提升;在专利申请号为“2019101325681”、专利名称为“一种体积测量的设备与方法”中公开了视觉摄像单元、动态称重传感器,视觉摄像单元包括对准摄像区域多个角度的深度相机,通过多深度相机标定技术以及点云匹配技术,可融合多个视角的深度数据,重构不规则物体的三维空间尺寸信息,同时利用切片法将不规则物体的三维空间尺寸切成n片不规则的图形,借助积分法求助不规则物体的体积,极大的提高了体积计算精度,以及对不规则程度的适应性,利用体积测量设备实现对不同物料体积的精确测量;但是在矿石开采到输送这一阶段,由于矿石体积不同,输送过程中经常出现卡盾、堵塞的问题,影响整个矿石开采效率。
技术实现要素:
3.针对目前矿石开采输送过程物料体积难以精准测量的技术问题,本实用新型提出一种皮带机物料体积实时测量系统。
4.为了解决上述问题,本实用新型的技术方案是这样实现的:
5.一种皮带机物料体积实时测量系统,包括控制柜和皮带机,控制柜通过驱动装置与皮带机相连接,所述皮带机上安装有物料轮廓监测组件,皮带机内安装有速度检测组件,物料轮廓监测组件与速度检测组件相配合且物料轮廓监测组件和速度检测组件均与上位机相连接。
6.优选地,所述驱动装置包括驱动电机和减速机,驱动电机与减速机相连接,减速机与皮带机相连接;所述驱动电机与控制柜相连接。
7.优选地,所述物料轮廓监测组件包括线阵测距传感器,线阵测距传感器安装在皮带机上方,线阵测距传感器与上位机相连接;所述线阵测距传感器与速度检测组件相配合。
8.优选地,所述物料轮廓监测组件还包括3d相机,3d相机安装在皮带机上,3d相机与上位机相连接。
9.优选地,所述速度检测组件包括速度编码器,速度编码器安装在皮带机内且速度编码器通过速度采集板与上位机相连接。
10.皮带机物料体积实时测量系统的方法,包括以下步骤:
11.s1、首先上位机实时获取物料轮廓监测组件中的线阵测距传感器采集皮带机上物料的轮廓数据以及速度编码器采集皮带机的输送速度;
12.s2、随后通过点云数据预处理算法对物料轮廓数据进行噪点识别处理,对物料轮廓数据噪点识别处理后通过线阵点云数据滤波算法对物料轮廓数据进行限副均值平滑滤
波算法;
13.s3、最后通过物料体积计量算法计算物料体积算法计算物料体积,n表示物料表面轮廓数据点数,x
i
表示为第i个点,k表示皮带机表面轮廓数据第i个点为x
i
在皮带机前进方向两帧数据的采集位置间距,表示两个轮廓点之间的极坐标夹角。
14.优选地,所述步骤s2中噪点识别处理采用阈值判定法,将标定的皮带轮廓点k,向上平移m,得到阈值q=m
‑
k;若传感器采集数据k’,k’<q,则认为是噪点。
15.优选地,所述步骤s2中噪点识别处理采用尖峰判定法,若连续n个物料表面轮廓数据点中出现明显的尖峰突刺,则这n个物料表面轮廓数据点都是噪点,采用曲线拟合方式,将噪点替换为曲线拟合点。
16.优选地,所述n<11。
17.与现有技术相比,本实用新型的有益效果:
18.本实用新型通过皮带机上安装物料轮廓监测组件和速度检测组件结合点云处理算法实现对皮带机上物料体积实时精准测量,物料轮廓监测组件包括线阵测距传感器对准皮带机输送进行采集物料表面轮廓数据在获取的皮带输送速度上结合点云技术进行积分得到物料体积,为后续物料高效稳定输送提供数据支撑。
附图说明
19.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
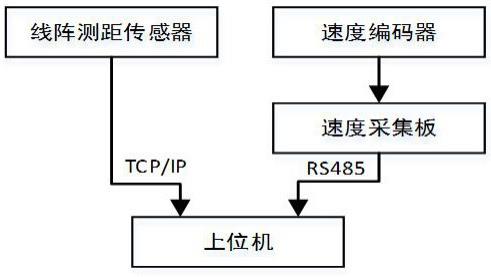
20.图1为本实用新型的工作原理示意图。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.实施例1:如图1所示,一种皮带机物料体积实时测量系统,包括控制柜和皮带机,控制柜通过驱动装置与皮带机相连接,驱动装置包括驱动电机和减速机,驱动电机与减速机相连接,减速机与皮带机相连接;所述驱动电机与控制柜相连接,所述皮带机上安装有物料轮廓监测组件,皮带机内安装有速度检测组件,物料轮廓监测组件与速度检测组件相配合且物料轮廓监测组件和速度检测组件均与上位机相连接。
23.所述物料轮廓监测组件包括线阵测距传感器,线阵测距传感器安装在皮带机上方,线阵测距传感器放置于皮带机上方,检测范围包括整个皮带机,线阵测距传感器与上位机相连接;所述线阵测距传感器与速度检测组件相配合,速度检测组件包括速度编码器,速度编码器位于皮带机上下皮带之间,速度编码器检测轮向上可靠贴紧上皮带,从而检测上
皮带的速度,速度编码器安装在皮带机内且速度编码器通过速度采集板与上位机相连接,皮带机控制柜控制驱动电机的输出转速,驱动电机通过减速机带动皮带机主动托辊,从而带动皮带转动,线阵测距传感器放置于皮带机一组托辊正上方,线阵测距传感器采集皮带表面的轮廓点云数据,线阵测距传感器通过tcp/ip协议将皮带机轮廓点云数据传递给上位机,速度编码器固定在皮带机上下皮带之间,并检测上皮带的行走速度,速度采集板采集速度编码器的脉冲信号并进行脉冲计数,速度采集板通过rs485协议将脉冲计数传递给上位机,线阵相机采集皮带机上物料的外轮廓数据,速度编码器采集皮带机的运行速度。上位机将物料外轮廓数据在速度上进行积分得到物料体积。
24.实施例2:一种皮带机物料体积实时测量系统,所述物料轮廓监测组件还包括3d相机,3d相机安装在皮带机上,3d相机与上位机相连接,利用3d相机采集皮带上物料图像信息作为辅助参数便于构件物料三维结构。
25.其余结构与实施例1相同。
26.实施例3:一种皮带机物料体积实时测量系统的方法,包括以下步骤:
27.s1、首先上位机实时获取物料轮廓监测组件中的线阵测距传感器采集皮带机上物料的轮廓数据以及速度编码器采集皮带机的输送速度,线阵测距传感器采集皮带机上物料的表面轮廓数据,速度编码器实时采集皮带机的输送速度。速度采集器采集皮带机皮带运行速度。上位机实时读取线阵测距传感器和速度采集板的数据;
28.s2、随后通过点云数据预处理算法对物料轮廓数据进行噪点识别处理,对物料轮廓数据噪点识别处理后,通过线阵点云数据滤波算法对物料轮廓数据进行限副均值平滑滤波;
29.s3、最后通过物料体积计量算法计算物料体积s3、最后通过物料体积计量算法计算物料体积,n表示物料表面轮廓数据点个数,x
i
表示为单帧物料表面轮廓数据中第i个点,k表示皮带机表面轮廓数据第i个点为x
i
在皮带机前进方向两帧数据的采集位置间距即 k表示相邻两帧轮廓数据采集点在皮带运行方向上的距离,表示单帧数据中的相邻两个轮廓数据点的极坐标夹角。
30.实施例4:一种皮带机物料体积实时测量系统的方法,所述步骤s2中噪点识别处理采用尖峰判定法,若连续n个物料表面轮廓数据点中出现明显的尖峰突刺,n<11,则这n个物料表面轮廓数据点都是噪点,采用曲线拟合方式,将噪点替换为曲线拟合点。
31.其余方法与实施例3相同。
32.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1