多类型振动传感器校准用结构化自动采集的测量装置的制作方法
1.本实用新型涉及一种校准振动传感器用的数据采集测量装置,特别是公开一种多类型振动传感器校准用结构化自动采集的测量装置,通过设置多种接口的接线端组结合结构化的电子文档存储信息实现自动匹配通信信号采集通道、保存历史测量记录、自动查询历史测量记录、自动完成新的信息采集流程并记录,适用于计量检测行业对各类型振动传感器进行校准时信息的自动采集,提高了工作效率。
背景技术:
2.振动传感器广泛应用于发电厂、机场、桥梁等大型建筑、飞机船舶汽车等大型设备设计研究公司等领域,振动传感器在使用一段时间后均需要重新进行校准以确认是否满足工作的需求,通常一次性就需要采集若干振动传感器的信息。
3.振动传感器按照测量参数可以分为加速度/速度/位移,分别按照《jjg233-2008压电加速度计检定规程》、《jjg134-003磁电式速度传感器检定规程》和《jjg 644-2003 振动位移传感器检定规程》。
4.振动传感器按照输出信号类型可以分为电荷式、电压式,电荷型需连接电荷放大器转换成电压信号。
5.振动传感器按照工作电源类型可以分为无源型、恒流源型。恒流源型需连接iepe测量放大器驱动工作。
6.振动传感器为了和后续测量仪器连接,常用的接口包含bnc、鳄鱼夹、螺纹、裸线等连接形式。
7.针对不同类型的传感器进行校准信息采集时,除了需要匹配相应接口的连接用插接件接口,还要采用与类型匹配的相应通信信号采集通道的测量设备,所以一次采集多类型振动传感器校准信息数据时,需要更换多台不同接口、不同通信信号采集通道的设备,非常不便,不利于采集工作的完成。
技术实现要素:
8.本实用新型的目的是解决现有技术的缺陷,设计一种多类型振动传感器校准用结构化自动采集的测量装置,测量装置设置了具有多种接口和多种通信信号采集通道,实现对多种参数、多种类型、多种工作电源、多种连接接口的不同振动传感器的自动适应和匹配,能根据样品信息自动匹配并切换通信信号采集通道,根据用户配置自动完成校准信息数据的采集,弥补现有采集方式的不足。
9.本实用新型是这样实现的:一种多类型振动传感器校准用结构化自动采集的测量装置,其特征在于:所述的测量装置包括在机箱上设有传感器信号接线端组及机箱的箱体底部固定有传感器信号接入并线模块、传感器信号导出分线模块、电荷放大器、iepe测量放大器、及d/a转换模块的振动传感器测量装置,所述振动传感器测量装置包括固定于机箱的箱体底部的振动台、固定在振动台上中心部位作为测量标准的加速度传感器、振动台旁侧
设有与振动台电路连接的主机,所述的主机分别与功率放大器、传感器信号接线端组、传感器信号接入并线模块、传感器信号导出分线模块、电荷放大器、iepe测量放大器、电压a/d转换模块、d/a转换模块和数据存储模块电路连接,待测传感器固定在处于机箱顶板中心通孔处的作为测量标准的加速度传感器上,所述的传感器信号接线端组的每一个接线端均分别接入传感器信号接入并线模块,所述的传感器信号接入并线模块与传感器信号导出分线模块电路连接,所述传感器信号导出分线模块的各分线端分别与电荷放大器、iepe测量放大器、电压a/d转换模块的一端分别电路连接,同时电荷放大器和iepe测量放大器的另一端分别连接至电压a/d转换模块,所述的电压a/d转换模块还与待测传感器电路连接,所述的待测传感器与传感器信号接线端组也电路连接,所述的机箱的箱体表面还设有分别与固定于机箱的箱体底部的主机电路连接的结构化信息采集接口、控制键及信号灯,所述测量装置的结构化信息采集接口连接与待测传感器对应匹配的结构化电子文档的存储器,所述的结构化电子文档的存储器为每个振动传感器在初始时匹配的一个以结构化电子文档方式存储了相应数据信息的存储器,所存储的信息包括传感器信息、测量设置和测量结果。
10.所述传感器信号接线端组设有包括bnc、鳄鱼夹、螺纹、裸线形式接口的接线端子。所述的控制键用于控制主机的启动和停止。
11.采用本实用新型对多类型振动传感器进行校准数据信息自动采集的具体步骤如下:
12.s1、将待测传感器对应匹配的结构化电子文档的存储器接入结构化信息采集接口;
13.s2、主机接通电源启动,输出数字信号0至d/a转换模块,驱动d/a转换模块通道0输出高电平使信号灯亮红灯;
14.s3、主机通过结构化信息采集接口读取结构化电子文档,从sheet1获取传感器类型、输出信号类型、激励电流、激励电压信息,从sheet2获取设定频率序列f和设定物理量s序列;
15.s4、所述主机读取数据存储模块中存储的驱动振动台振动的频率序列f1、f2
……
fn以及对应的振动台的加速度驱动系数序列k1、k2
……
kn和作为测量标准的加速度传感器的灵敏度序列s1、s2
……
sn,主机根据读取到的传感器信息设定通过电压a/d转换模块启用的相应通信信号采集通道序号;
16.s5、开始第j点的测量,j为自然数,且1≤j≤m,m为待测传感器需测量的点的数量,首次测量时j=1,所述主机通过对驱动振动台振动的频率序列f1、f2
……
fn以及对应的振动台的加速度驱动系数序列k1、k2
……
kn和作为测量标准的加速度传感器的灵敏度序列s1、s2
……
sn进行线性插值计算获取kj (fj)和s(fj),然后根据传感器类型计算对应的加速度值a0;
17.s6、所述主机发送数字信号sig[kj (fj)*a0*sin(2πfj*t)]至d/a转换模块,驱动d/a转换模块输出模拟信号sig[kj (fj)*a0*sin(2πfj*t)],所述功率放大器放大d/a转换模块输出的模拟信号sig[kj (fj)*a0*sin(2πfj*t)]驱动振动台工作,所述振动台产生机械振动,由所述待测传感器和作为测量标准的加速度传感器测量振动台的机械振动并输出模拟信号;
[0018]
s7、电压a/d转换模块10启用相应序号的通信信号采集通道,分别采集作为测量标
准的加速度传感器3和待测传感器4输出的模拟信号,转换成数字信号传输至主机13中,并分别存储为datan 和datan,主机13根据传感器类型对datan进行积分得到datan’;
[0019]
s8、采用正弦逼近法计算data
n’和datan的电压输出值u’和u,主机通过u’/ s(fj)计算输出值sj’和设定值sj的相对偏差|sj’/sj-1|,相对偏差小于或等于预定义参数δ,则计算u/ sj’的数值并在结构化电子文档中j点的灵敏度所在位置保存采集到的校准信息数据,同时输出数字信号至d/a转换模块,驱动d/a转换模块输出高电平使信号灯亮绿灯,当前测点的测量并采集工作完成,开始测量下一点;否则设a0= a0/ sj’*sj,所述主机根据新的a0发送新的数字信号 sig[kj (fj)*a0*sin(2πfj*t)]至d/a转换模块,再次开始测量,直至当前测点的测量采集工作完成,开始测量下一点;
[0020]
s9、重复步骤5至步骤8,重复次数为m-1次,直到完成各测点的测量,测量工作结束。
[0021]
与所述结构化信息采集接口连接的结构化电子文档的存储器为每个振动传感器在初始时匹配的一个以结构化电子文档方式存储了相应数据信息的存储器,所存储的信息包括传感器信息、测量设置和测量结果,所述的结构化电子文档初始化为2个sheet,其中sheet1存储传感器信息,sheet2为以序列形式存储的测量信息,包括测量设置和测量结果,序列数量为待测传感器需测量的点的数量;
[0022]
所述sheet1中存储的存储传感器信息包括传感器类型,分别为加速度传感器、速度传感器及位移传感器,对应分别记为a、v或d,输出信号类型有电压、电荷,对应分别记为pc、mv,其中激励电流为4ma;
[0023]
所述步骤s4中的数据存储模块内部存储的各序列至少提供2组。
[0024]
所述步骤s5中主机进行线性插值计算获取kj (fj)并根据传感器类型计算对应的加速度值a0的计算方式分别如下:
[0025]
(1)加速度传感器的加速度值的计算公式为a0=sj;
[0026]
(2)速度传感器的加速度值的计算公式为a0=2πfjsj;
[0027]
(3)位移传感器的加速度值的计算公式为a0=(2πfj)2sj 。
[0028]
所述步骤s7中主机根据传感器类型对datan进行积分得到data
n’的积分次数如下:
[0029]
(1)加速度传感器的积分次数为0;
[0030]
(2)速度传感器的积分次数为1;
[0031]
(3)位移传感器的积分次数为2。
[0032]
本实用新型的有益效果是:本实用新型改进了现有技术测量装置,在测量装置上增设了具有多种接口和多种通信信号采集通道,并为每一传感器配置相应的存储有传感器信息、测量设置和测量结果的结构化电子文档的存储器,第三方仅需将待测传感器配套的结构化电子文档的存储器接入测量装置相应接口,再安装好待测传感器,测量装置根据读取的传感器信息和历史证书信息或测量模板,自动选择与待测传感器对应的信号通道,并根据结构化电子文档的存储器中的结构化电子文档信息自动开展测量。本实用新型适用于计量检测行业,避免了面对多种信号接口、多种电源类型、多种信号类型的振动传感器需要采集校准信息时频繁切换接口和信号通道。
附图说明
[0033]
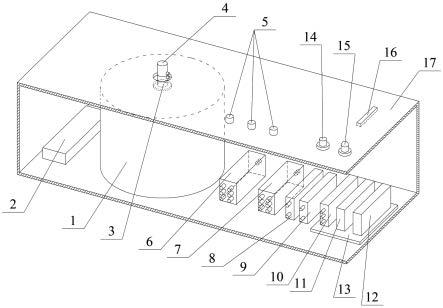
图1是本实用新型多类型振动传感器校准用结构化自动采集的测量装置的结构示意简图。
[0034]
图2是本实用新型测量装置中传感器信号传输通道示意简图。
[0035]
图中:1、振动台; 2、功率放大器; 3、作为测量标准的加速度传感器; 4、待测传感器; 5、传感器信号接线端组; 6、传感器信号接入并线模块; 7、传感器信号导出分线模块; 8、电荷放大器; 9、iepe测量放大器; 10、电压a/d转换模块; 11、d/a转换模块; 12、数据存储模块; 13、主机; 14、控制键; 15、信号灯; 16、结构化信息采集接口; 17、机箱。
具体实施方式
[0036]
下面结合附图和具体实施例对本实用新型作进一步说明。
[0037]
本实用新型为一种多类型振动传感器校准用结构化自动采集的测量装置,本实用新型进行校准数据信息采集时,测量装置设置了具有多种接口和多种通信信号采集通道,根据附图1和附图2,所述的测量装置是在现有的振动传感器测量装置上增设了传感器信号接线端组5、传感器信号接入并线模块6、传感器信号导出分线模块7、电荷放大器8、iepe测量放大器9、及d/a转换模块11。
[0038]
所述的测量装置包括固定于机箱17的箱体底部的振动台1、固定在振动台1上中心部位作为测量标准的加速度传感器3、设于振动台1旁侧并与振动台1电路连接的主机13,以及设于机箱17内部并分别与主机13电路连接的功率放大器2、传感器信号接线端组5、传感器信号接入并线模块6、传感器信号导出分线模块7、电荷放大器8、iepe测量放大器9、电压a/d转换模块10、d/a转换模块11和数据存储模块12,其中传感器信号接线端组5的每一个接线端均分别接入传感器信号接入并线模块6,所述的传感器信号接入并线模块6与传感器信号导出分线模块7电路连接,所述的电荷放大器8、iepe测量放大器9、电压a/d转换模块10的一端分别与传感器信号导出分线模块7的各分线端电路连接,同时电荷放大器8和iepe测量放大器9的另一端分别连接至电压a/d转换模块10,所述的电压a/d转换模块10还与待测传感器4电路连接,所述的待测传感器4与传感器信号接线端组5也电路连接。所述的机箱17的箱体表面设有分别与主机13电路连接的结构化信息采集接口16、控制键14及信号灯15。待测传感器4固定在处于机箱17顶板中心通孔处的作为测量标准的加速度传感器3上。所述传感器信号接线端组5设有包括bnc、鳄鱼夹、螺纹、裸线等形式接口的接线端子。
[0039]
所述的结构化信息采集接口16连接存储有结构化电子文档的存储器,每个振动传感器在初始时均匹配有一个以结构化电子文档方式存储了相应数据信息的存储器,包括传感器信息、测量设置和测量结果。
[0040]
所述的结构化电子文档(以excel文件为例):初始化为2个sheet,sheet1存储传感器信息,sheet2存储测量信息,包括测量设置和测量结果。
[0041]
sheet1:传感器类型厂家型号编号输出信号类型激励电流
ꢀꢀꢀꢀꢀꢀ
[0042]
表中的传感器类型为加速度传感器、速度传感器、位移传感器,对应分别记为a、v或d,输出信号类型有电压、电荷,对应分别记为pc、mv,其中激励电流为4ma。
[0043]
sheet2: 设定频率f1f2
……
fm设定值s1s2
……
sm灵敏度
ꢀꢀ……ꢀ
[0044]
所述的数据存储模块12内部存储驱动振动台振动的频率序列f1、f2
……
fn,和对应的振动台的加速度驱动系数序列k1、k2
……
kn及作为测量标准的加速度传感器的灵敏度序列s1、s2
……
sn,各所述的序列至少提供2组,通常提供6~10组为宜,记录如下表所示:频率f1f2
……
fn驱动系数k1k2
……
kn灵敏度s1s2
……
sn
[0045]
所述的控制键14用于控制主机13的启动和停止。
[0046]
本实用新型对多类型振动传感器进行校准数据信息自动采集的具体步骤如下:
[0047]
1、将待测传感器4对应匹配的结构化电子文档的存储器接入结构化信息采集接口16。
[0048]
2、按下控制键14,主机13接通电源启动,所述主机13输出数字信号0至d/a转换模块11,驱动d/a转换模块11通道0输出高电平使信号灯15亮红灯。
[0049]
3、主机13通过结构化信息采集接口16读取结构化电子文档,从sheet1获取传感器类型、输出信号类型、激励电流、激励电压等信息,从sheet2获取设定频率序列f和设定物理量s序列。
[0050]
4、所述主机13读取数据存储模块12中存储的驱动振动台振动的频率序列f1、f2
……
fn以及对应的振动台的加速度驱动系数序列k1、k2
……
kn和作为测量标准的加速度传感器的灵敏度序列s1、s2
……
sn。
[0051]
主机13根据读取到的传感器信息按照表1设定通过电压a/d转换模块10启用的相应通信信号采集通道序号。
[0052]
表输出信号类型激励电流启用通道pc 0、3mvma1、3mv 2、3
[0053]
5、开始第j点的测量,j为自然数,且1≤j≤m,m为待测传感器4需测量的点的数量,首次测量时j=1。所述主机13通过对驱动振动台振动的频率序列f1、f2
……
fn以及对应的振动台的加速度驱动系数序列k1、k2
……
kn和作为测量标准的加速度传感器的灵敏度序列s1、s2
……
sn进行线性插值计算获取kj (fj)和s(fj)。然后根据传感器类型计算对应的加速度值a0,计算方式如下表。传感器类型加速度值aa0=sjva0=2πfjsjda0=(2πfj)2sj
[0054]
6、所述主机13发送数字信号sig[kj (fj)*a0*sin(2πfj*t)]至d/a转换模块11,驱
动d/a转换模块11输出模拟信号sig[kj (fj)*a0*sin(2πfj*t)]。所述功率放大器2放大d/a转换模块11输出的模拟信号sig[kj (fj)*a0*sin(2πfj*t)]驱动振动台1工作,产生机械振动,并由所述待测传感器4和作为测量标准的加速度传感器3分别测量振动台1的机械振动并分别输出模拟信号。
[0055]
7、电压a/d转换模块10启用相应序号的通信信号采集通道,分别采集作为测量标准的加速度传感器3和待测传感器4输出的模拟信号,转换成数字信号传输至主机13中,并分别存储为datan和datan。主机13根据传感器类型对datan进行积分得到data
n’,积分次数如下表所示。传感器类型积分次数a0v1d2
[0056]
8、通过正弦逼近法计算data
n’和datan的电压输出值u’和u,主机13通过u’/s(fj)计算输出值sj’和设定值sj的相对偏差|sj’/sj-1|。如果相对偏差≤δ,δ为预定义参数,通常δ为0至10%之间的数值,可根据需要校准的精度选择。计算u/ sj’的数值并在结构化电子文档中j点的灵敏度所在位置保存,主机13输出数字信号1至d/a转换模块11,驱动d/a转换模块11输出高电平使信号灯14亮绿灯,当前测点的测量并采集工作完成,开始测量下一点。否则设a0= a0/ sj’*sj,所述主机13根据新的a0发送新的数字信号 sig[kj (fj)*a0*sin(2πfj*t)]至d/a转换模块11,再次开始测量,直至当前测点的测量采集工作完成,可以开始测量下一点。
[0057]
9、重复步骤5至步骤8,重复次数为m-1次,直到完成各测点的测量,测量工作结束。
[0058]
对待测传感器4本次测量工作完成,取下其对应的结构化电子文档的存储器,将下一个待测传感器对应匹配的结构化电子文档的存储器接入结构化信息采集接口16,即可开始下一个待测传感器的测量工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1