一种钢轨爬行位移在线监测装置的制作方法
1.本实用新型涉及铁路运维设备技术领域,尤其涉及一种钢轨爬行位移在线监测装置。
背景技术:
2.随着我国铁路建设的迅速发展,对铁路运输的要求也越来越高,提速、安全是我国铁路部门面对的两大课题。随之带来一些保证列车安全快速运行的问题,对无缝线路钢轨的爬行位移测量就是其中之一。
3.爬行位移对铁路造成的危害如下:普通铁路线路爬行一端使接头挤成连续瞎缝;另一端轨缝被拉大,造成夹板螺栓被拉弯或拉断;使轨枕离开道床,造成轨道沉落;带动扣件位移,拉裂轨枕。无缝线路地段钢轨爬行将造成钢轨内应力变化和应力分布不均。累积爬行过大,夏季高温钢轨内部将产生较大压应力,存在胀轨风险;冬季产生较大拉应力,而产生断轨。所以,铁路工务部门以车间为单位,由两至四名工人组成测量小组,每月按规定测量一次,对管内无缝线路钢轨位移进行观测、计算、分析。因而只能定期得到钢轨位移数据,而无法得到钢轨位移的实时信息。
4.由于车间管辖线路长,检测任务重,因此研究一种适合高速铁路使用的钢轨爬行位移在线监测装置,有效检测钢轨爬行位移量以预防胀轨、跑道、断轨的发生,确保高速铁路安全运营意义重大。
5.公开号为cn110733534a的专利申请公开了一种轨道钢轨爬行观测方法及系统,其在钢轨沿线依次设置一系列检测标志,检测标志为由标记a和标记b构成的标记对;使安装有图像采集系统的铁道检测车在轨道钢轨上行驶,并在行驶过程中,通过图像采集系统批量采集时刻tn和时刻tm各检测标志的图像;对于每个检测标志的图像,计算时刻tn标记a和标记b之间的纵向相对距离ln,以及时刻tm标记a与标记b之间的纵向相对距离 lm;根据纵向相对距离ln、纵向相对距离lm以及图像尺寸转实物尺寸的转换系数计算检测标志所对应位置的钢轨纵向爬行量。这就需要配备专用的铁道检测车,因而无法对爬行位移进行实时监测。
6.公开号为cn212223481u的专利申请公开了一种基于容栅传感器的钢轨爬行距离实时测量系统,用于测量钢轨爬行距离的容栅传感器安装在钢轨以及钢轨之下的混凝土基础中,安装和维护不变。如对现有的铁路系统进行改造,由于需要对轨道基础进行变动,因而影响正常的铁路运输,且需要对现有的基础进行破拆和改造,工程量大,安装耗时长。
技术实现要素:
7.本实用新型的目的是提供一种钢轨爬行位移在线监测装置,以实现对钢轨爬行位移的实时在线监测。
8.为实现上述目的,本发明所采用的技术方案是:
9.一种钢轨爬行位移在线监测装置,包括上位机、固定连接在钢轨一侧的全反射片、
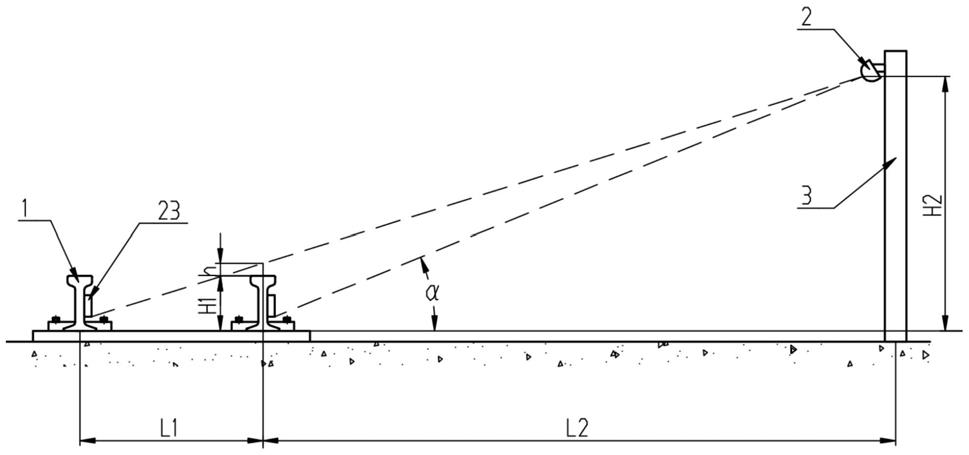
1间距为l1,h1=176mm,l1为标准轨距,即l1=1435mm。为了保证行车安全,摄像头2 距离右侧钢轨1的水平距离l2为4000mm,为保证两条钢轨1不被互相遮挡,则满足:
[0041][0042]
将h1=176,l1=1435,l2=4000代入上式,可以得出h2≥0.6666m。
[0043]
2、为了保证摄像头2图像视野中的靠左的全反射片23出现在图像靠近中心的位置,需要提升摄像头2。提升后左侧轨道1上的全反射片23下端与摄像头2连线与右侧轨道1 顶部垂直距离为h,h为影响量,一般与h1等高,令h=200mm,其中全反射片23直径50 mm。所以h2满足:
[0044][0045]
计算后得出h2≥1.162m。
[0046]
3、如摄像头2过高,则俯角过大,会使拍摄到的全反射片23变形严重,影响测量精度。垂直方向变形比例为x,x不超过20%。则满足:
[0047]
x=1-cosα
[0048]
式中α=arctan(h2/l2)
[0049]
式中α为右侧轨道1底部与摄像头2之间连线与水平面之间的夹角。
[0050]
当变形比例达到20%时,计算出:h2为1.96m。
[0051]
摄像头需要测量两根钢轨1的爬行位移情况,在云台的带动下,摄像头2可以控制视野并定位,摄像头2的俯角范围为0
°
~90
°
。
[0052]
所述第一温度传感器为18b20传感器,其挂在支撑柱上并悬浮于空中,周围没有明显的黑色吸光材料。
[0053]
所述第二温度传感器为pt100,并镶嵌磁铁,工作时吸附于钢轨1背阳光的一侧。
[0054]
所述交换机型号为tp-link tl-sf1016d,可连接多台光纤收发器a。
[0055]
光纤收发器a和光线收发器b的型号分别为tp-link tl-fc311a-3和tl-fc311a-3用于将电信号与光信号进行转换,并通过光纤进行远距离信号传输。
[0056]
计算机承担图像数据运算、指令控制、数据存储转发等功能型号为戴尔vostro 5090 19-n7。计算机还连接有短信发送模块,在钢轨1爬行位移出现异常时可通过网络实时向管理部门报警,以便及时采取应对措施,保证列车行车安全。钢轨1相关参数达到预警、报警值时可第一时间给段、车间、工区的管理人员消息,以便相关人员及时对报警情况做出处理,保证报警路段列车行车安全。
[0057]
摄像头2采用像素为2560
×
1440(400万像素)的球机。
[0058]
钢轨1的位移量通过摄像头2进行测量,测量原理如下:
[0059]
首先是根据光全反射的原理利用固定在钢轨1上的全反射片23进行特定红光反射,用摄像头2进行拍照,经过对图像的处理,根据全反射片23在照片中的位置变化,计算出钢轨1的位移量。
[0060]
图像处理的方法为:
[0061]
首先通过每个像素点的rgb值将图片的亮度进行计算得到第一个滤值参数,然后成倍数衰减0.4倍(注:0.4倍为经验数值),得到第二个滤波参数,用于区分其他干扰物,最
后计算出全反射片23在图像中的位置,再根据全反射片23的尺寸,换算成钢轨1爬行位移量。
[0062]
具体测量过程为:
[0063]
摄像头2调好焦距后,对全反射片23进行拍照,然后对全反射片23的图像进行有效值的滤波判断,进行全反射片23的图像坐标的计算,然后对全反射片23图像的边界进行确定,结合全反射片23的实际尺寸,计算出整个图像的坐标值,最后将所有信息保存(将图像保存为原始对比图片,计算的数据保存为原始数据、全反射片23边界为比例尺信息)。
[0064]
进行测量时,首先调取原始数据(原始坐标点和图像与比例值等信息),然后调节好镜头焦距,拍照,计算出坐标,最后与原始数据对比得出钢轨爬行位移。
[0065]
摄像头2距离右侧钢轨1的距离为1m到10m,精度都保持在0.5mm以内。
[0066]
图像处理及目标点坐标计算
[0067]
通过计算机对图像进行处理并得到全反射片23的坐标为现有成熟技术,主要经过六个步骤:图像亮度整体调节、杂色阈值过滤背景、有效色强度过滤、有效像素的杂点过滤、图像有效边界确定、全反射片中心平均像素值计算。
[0068]
由于室外天气和光线的影响,摄像头采集到的图像整体亮度有很大差异,为了能正确识别目标点,要将图像的亮度调节到一定范围内,计算的数据才准确。
[0069]
通过对图像每个像素的rbg值进行筛查,按照r值进行统计,求取平均值,作为有效点的一个判断阈值,将图像的亮度因素尽量消除。
[0070]
由于全反射片23反射的是纯红色光线,蓝色和绿色的值很低,所以,通过有效过滤图像蓝色和绿色成分,能够排除大部分的无效像素点,如白色光、绿色光、蓝色光。杂色阈值过滤可以排除树木、天空、钢轨顶反射白光火车轮等的干扰,保留图像的足够“红色”部分。
[0071]
实施例2
[0072]
如图2和图3所示,本实施例与实施例1的不同之处在于:
[0073]
所述支撑组件3包括矩形的底板4、竖向焊接在底板4上面的矩形的外管5、下部插在外管5内的矩形的内管14以及焊接在内管14顶部的矩形的护框9。所述摄像头2设置在护框9内,所述摄像头2与护框9转动连接,所述内管14与外管5滑动配合,所述底板4 固定连接在路肩上。
[0074]
如图5所示,所述内管14左侧的内壁固定设置有竖向的齿条18,所述齿条18上啮合有第一齿轮19,所述第一齿轮19中心贯穿固定连接有转轴7,所述转轴7与外管5贯穿转动连接,所述内管14两侧的侧壁在与转轴7相配合的位置均设有竖向的豁口20,所述转轴7位于豁口20内,所述转轴7与内管14间隙配合。
[0075]
如图2所示,所述外管5左侧焊接有圆形的凸块6,所述转轴7与凸块6贯穿转动连接,所述转轴7左端设有内六角形的凹坑,所述凸块6上设有用于将转轴7锁定的第一蝶形螺钉8。
[0076]
如图2和图4所示,所述护框9内的顶部转动连接有蜗轮12,所述蜗轮12的轴线为竖向,所述蜗轮12底部与云台相连。所述护框9内在蜗轮12两侧焊接有支撑块13,所述蜗轮12后侧设有与其啮合的蜗杆10,所述支撑块13均与蜗杆10贯穿转动连接,所述蜗杆10左端与护框9贯穿转动连接,所述蜗杆10左端也设有内六角形的凹坑。
[0077]
如图4所示,所述护框9中部焊接有竖向的固定柱15,所述蜗轮12为空心的圆筒形,
所述蜗轮12顶部为顶板17,所述蜗轮12与蜗杆10啮合的部位为沿圆周均布的倾斜的长条形的通孔。所述顶板17与固定柱15转动连接,所述顶板17下设有第二扭簧16,所述第二扭簧16套在固定柱15上,所述第二扭簧16两端分别与固定柱15和顶板17固定连接。所述护框9上用于将蜗轮12锁定的第二蝶形螺钉11,所述护框9和支撑块13均与第二蝶形螺钉11螺纹连接。
[0078]
由于铁路现场路肩高度各不相同,摄像头到现场安装时就需要调整高度和角度,以保证摄像头2工作时的高度符合要求,同时使摄像头2朝向全反射片23。
[0079]
高度调整方法为:将六角扳手插入到转轴7左端的凹坑内,拧动转轴7,在齿条18和第一齿轮19的作用下,内管14沿外管5内壁上下移动,从而使摄像头2的高度可调,高度调整好后,拧紧第一蝶形螺钉8,将转轴7锁定。
[0080]
角度调整方法为:将六角扳手插入到蜗杆10左端的凹坑内,拧动蜗杆10,蜗杆10带动蜗轮12旋转,从而调整摄像头2的角度。角度调整好后,拧紧第二蝶形螺钉11,将蜗杆10锁定。
[0081]
在第二扭簧16的作用下,可保证蜗轮12上的通孔的同一侧面与蜗杆10始终保持贴紧,防止现场因火车经过或其它原因发生振动时,因蜗轮12和蜗杆10啮合时存在的间隙而导致摄像头2摆动,进而影响测量的精度。
[0082]
实施例3
[0083]
如图6所示,本实施例与实施例2的不同之处在于,所述第一齿轮19右侧设有第二齿轮21,所述第二齿轮21与转轴7贯穿转动连接,所述第一齿轮19与第二齿轮21间隙配合,所述第一齿轮19右面设有圆形的凹坑,该凹坑内设有第一扭簧22,所述第一扭簧22套在转轴7上,所述第一扭簧22两端分别与第一齿轮19和第二齿轮21固定连接,第一扭簧22对第一齿轮19和第二齿轮21施加反向扭力。
[0084]
在第一扭簧22的作用下,所述第一齿轮19和第二齿轮21上的齿相反的一侧与齿条18啮合,从而对啮合间隙进行补偿,防止现场因火车经过或其它原因发生振动时,因第一齿轮19和齿条18之间以及第二齿轮21和齿条18之间啮合时存在的间隙而导致摄像头2 上下窜动,进而影响测量的精度。
[0085]
目前,本技术的技术方案已经进行了中试,即产品在大规模量产前的小规模实验;中试完成后,在小范围内开展了用户使用调研,调研结果表明用户满意度较高;现在已经着手准备产品正式投产进行产业化(包括知识产权风险预警调研)。
[0086]
以上所述的实施例描述内容较为详细和具体,表达了本实用新型的优选实施例,仅用于说明本实用新型的技术思想及特点,其目的在于使本领域内的技术人员能够理解本实用新型的内容并据以实施,但并不仅仅局限于本实用新型,不能仅以本实施例来限定本实用新型的专利范围,即凡本实用新型所揭示的精神所做的同等变化或修饰,对于本领域的研究人员或技术人员来讲,在不脱离本实用新型的结构之内,系统内部的局部改进和子系统之间的改动、变换等,仍是本实用新型的专利范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1