用于确定车辆速度的数据的装置、评估装置及方法与流程
用于确定车辆速度的数据的装置、评估装置及方法
1.本发明涉及一种用于确定数据的装置,所述数据用于确定车辆(例如自行车)的速度。为此提供了磁铁,它可连接到车辆的车轮上,并在车轮的旋转过程中执行圆周运动。此外,该装置具有传感器单元,用于记录由磁铁的圆周运动所引起的信号。该传感器单元可固定在车辆的一个部件上,当磁铁被固定在车轮上且车轮被设定为旋转时,磁铁会运动经过该部件。
2.此外,本发明涉及一种用于确定车辆速度的评估装置,以及用于此目的的方法。
3.这类装置尤其可以是一种用于自行车的速度传感器的装置。为了这个目的,可将磁铁连接到自行车的车轮上。这尤其是可通过连接到其中一个车辐上来实现。此外还提供了传感器单元,其固定在自行车的车架上。在这种情况下选择一个点,磁铁在车轮的旋转过程中会经过这个点。传统的传感器单元通常具有簧片触点。在车轮的旋转过程中,磁铁被引导经过该簧片触点,从而使其闭合,并且电路也因此短暂地接通。这样就产生了电脉冲。通过测量脉冲之间的时间间隔,可以确定车轮每转一圈的单位时间δt。如果轮子的周长u也是已知的,就可以根据这些数据来计算速度:
[0004][0005]
其中v是所确定的速度,u是车轮的周长,δt是两个脉冲间的时间间隔。
[0006]
簧片触点通常通过一条双线制线路连接到评估装置,其执行评估,并在例如速度表上显示速度,或通过无线电来传递信号。
[0007]
自行车的速度测量的防篡改保护与电助力自行车一起变得越来越重要,因为电助力自行车正变得越来越流行。
[0008]
例如,根据德国的道路交通法,电机辅助的运动只能在25公里/小时的速度范围内进行。如果使用脚踏板助力,这种辅助可以提高到45公里/小时。
[0009]
为了绕过这些法律规定,已知有各种可以篡改速度测量的方法。一种可能性是向簧片触点下游的电路发送假脉冲,从而向控制器建议一个较低的速度,其中两个脉冲之间的时间间隔被加大。这样,簧片触点的信号就被完全抑制了。
[0010]
此外,其他装置也是已知的,它们被置于传感器单元处的簧片触点之前,因此处于簧片触点和磁铁之间。这些装置要么屏蔽磁场,要么将磁铁完全移除。磁场在一定的时间间隔内通过额外的装置施加到簧片触点上,从而使触点闭合。这样做的结果是产生相应的脉冲并在下游的评估装置中进行评估。然而,由于实际上不再有与簧片触点闭合之间的关联,速度也可以在这里任意设置。
[0011]
ep 3435094和jp 2014160009a描述了用传感器进行操作的一类速度计。us 9267800b2、us 4967153a和ep 2073022b1描述了基于脉冲操作的其他速度计。
[0012]
因此,本发明的目的是提供一种用于确定车辆速度的数据的装置和方法,该装置和方法更安全,不受篡改。
[0013]
根据本发明,这一目的是通过具有权利要求1所述的特征的装置和具有权利要求9所述的特征的方法来实现。
[0014]
进一步的有利实施方案在从属权利要求、说明书、附图及其描述中具体说明。
[0015]
根据权利要求1,传感器单元具有至少一个用于测量定量的磁场强度变化的传感器,并且该传感器配置为以至少200hz的采样频率对磁场强度变化进行采样。
[0016]
本发明的基本概念是提供一种不同于簧片传感器的传感器,它只指示磁场的存在与否。根据本发明,提供了至少一个传感器,其可以确定并传递磁场或其强度的定量变化。再加上至少200赫兹的采样频率,因此,在车轮旋转一圈、磁铁经过一次的期间,可以记录下多个采样值。
[0017]
这与传统的系统相比提供了如下优势,即:磁场变化的轮廓或过程也被采样并因此被记录。如果对这个轮廓进行评估,就可以检测出大量的上述篡改,从而能够抑制这种篡改。
[0018]
此外,提供了至少两个传感器用于测量定量的磁场强度变化。根据本发明,当磁铁连接到车轮上时,这些传感器设置在磁铁的圆周运动的方向上。换句话说,传感器设置成使得磁铁首先被引导经过一个传感器,随后经过另一个传感器。当然,这也可以用多个传感器来完成。
[0019]
理想情况下,传感器设置成相互接近,使得磁铁的磁场可被多个传感器同时测量到。这些传感器就不能被独立地影响而被篡改。
[0020]
由于用于定量记录磁场强度变化的传感器数量的增加,可以提供给评估装置的关于磁铁运动的可用信息也随之增加。这又促进了对篡改的识别,因为一方面,来自不同传感器的记录数据可以相互比较。如果这些传感器的测量区域重叠,那么进一步的篡改单元不仅会给一个传感器发送信号,而且会给其他传感器发送信号,这样一来,来自传感器的信号组合就不能相互匹配。
[0021]
原则上可以使用各种传感器来测量定量的磁场强度变化。为此,可优选使用霍尔传感器。霍尔传感器可基于半导体和/或集成电路来构建,因此它们非常紧凑,占用空间小。这样做的好处是,例如,在一个只有几毫米或几厘米大小的传感器壳体内可以容纳两个或四个霍尔传感器。然而,原则上,其他传感器也可用于这一目的,它们能够以所需的采样频率对磁场变化进行相应的定量评估。为此重要的是,在磁铁的经过期间可以记录多个采样值,这些采样值具有足够精确的分辨率,以建立磁场的变化。为此,仅确定磁场是否存在是不够的,而是要确定各个磁场的增加和减少。
[0022]
根据本发明的装置可用在用于确定车辆(特别是自行车)的速度的评估装置中。为此,评估装置还具有用于确定车辆速度的评估单元。
[0023]
评估单元提供用来分析根据本发明的装置所确定的关于定量的磁场强度变化的数据,从而可以得到车辆的行驶速度。
[0024]
为此,评估单元例如可以评估磁场强度变化的持续时间,以便确定速度。为此优选的是,使用高于阈值的存在的持续时间来确定速度。换句话说,就是确定磁铁需要多长时间才能经过传感器。“经过”应理解为指因车轮的旋转而使磁铁被引导经过传感器。磁铁的旋转速度可通过持续时间来确定。速度又可以通过与已知的车轮周长相结合地来确定。
[0025]
对于沿传感器的磁铁路径的行程δu来说,如果磁铁在时间δt(根据测量值确定)内产生高于阈值的测量值,那么速度vs就可以按如下方式计算:
[0026][0027]
其中,磁铁路径的周长为um,车轮的周长为ur。这些变量作为系统参数来设定。
[0028]
另有可能的是,评估单元设计成评估磁场强度变化的时间重复率,以确定车辆的速度。这样的评估基本上等同于簧片接触的已知评估,因为在这里确定了旋转速度。在这种情况下,也可以根据这些数据和车轮的周长一起来确定车辆的行驶速度。
[0029]
如果旋转一圈的持续时间为t,由速度v
p
可由下式计算:
[0030][0031]
在另一个实施例中,评估单元可设计成确定相邻传感器的信号的时间间隔ts,以测量定量的磁场强度来确定车辆的速度。为此还优选的是,针对磁场强度的要设定的阈值来确定这个距离。基于对两个传感器彼此之间的空间距离ds的了解,就可以确定车轮的行驶速度。结合已知的车轮的周长ur和磁铁路径的周长um,也可以计算出速度:
[0032][0033]
其中,磁铁路径的周长为um,车轮的周长为ur。这些变量作为系统参数来设定。需要注意的是,ts是有符号的,它也能检测到车轮在反方向的旋转。
[0034]
原则上,在评估单元中还可以提供所述方法的组合,从而使篡改更加困难。
[0035]
识别篡改的另一种可能性是将评估单元设计为将磁场变化的轮廓与预先定义的目标轮廓进行比较。在第一种近似情况下,目标轮廓对应的是如下函数:
[0036][0037]
这个函数在图4中显示,其显示了a=1和v=1时的磁场强度。
[0038]
在这种情况下,a代表振幅,vm代表磁铁速度。参数a和vm确定为使测量值s
t
和f(t)之间的均方根距离f最小。因此,例如可以根据均方根距离f的大小来确定不存在磁铁,而是存在有通过电磁铁来主动产生磁信号的篡改单元。然后,通过分析磁场强度变化的轮廓来认识到这不是被引导经过的磁铁,而是以其他方式产生的磁场。
[0039]
为了进一步提高针对篡改的安全性,可将用于确定数据的装置和评估装置之间的数据传输设计成安全的,特别是加密的。此外或可选的是,评估装置可配置为以安全的、特别是加密的方式来执行向下游处理单元的数据传输。这样的实施例可以确保在信号或数据的传输过程中无法随后进行篡改。简单的数字加密或类似的方法可以作为这一目的的加密方式。
[0040]
此外,本发明还涉及一种用于确定车辆,特别是自行车的速度的数据的方法,其中磁铁连接到车轮上,以便在车轮的旋转期间执行圆周运动。此外,在磁铁运动时会经过的车辆的一个部件上或在其中固定有用于记录由磁铁的圆周运动所引起的信号的传感器单元。这样做的结果是,当车轮旋转时,磁铁被引导经过传感器单元,从而产生信号。传感器单元在这里设计成可对磁场强度的变化进行定量测量,其中测量以至少200hz的采样频率进行。
[0041]
为此重要的是,这与已知的霍尔传感器不同,霍尔传感器只能进行针对磁场的离
散的测量,而本发明的传感器单元可以进行磁场强度变化的定量测量。
[0042]
在本发明的范围内,这应特别理解为具体地指确定磁场的强度,其中如果能确定该强度的变化,这对本发明来说就足够了。单纯的存在与否对于这个目的来说是不够的。对这种强度或变化的定量说明是必要的。
[0043]
为了确定车辆的速度,可以评估磁场强度变化的持续时间,特别是超过阈值的存在的持续时间。换句话说,对磁场强度变化的振幅的广度进行分析。通过了解磁铁的旋转速度以及磁铁路径的周长,可以由此确定车轮的速度。基于这些信息,可以结合已知的车轮周长来计算速度。
[0044]
作为附加或另选,传感器单元在至少两个相邻的位置(这些位置设于磁铁的圆周运动方向上)进行磁场强度变化的定量测量,这些定量测量的时间间隔可用于评估。在这种情况下,也可以确定车轮的圆周速度,而又可以根据周长来计算速度。
[0045]
另一种可能性是评估磁场强度变化的时间重复率,以确定速度。这样的计算与借助簧片传感器进行速度测量时的已知计算类似。
[0046]
为了识别篡改,可以进一步分析磁场强度变化的轮廓。为此,例如可以进行与目标轮廓进行比较的分析。也可以分析磁场强度变化的斜率、其最大值,或者磁场的最大值及其整个轮廓形状。例如,如果存在尖锐的边缘,就可以推测出信号不是来自旋转的磁铁。
[0047]
下文将根据一个示范性的实施例和示意图来对本发明进行更详细的解释。在这些附图中:
[0048]
图1显示了基本功能原理的一个非常示意性的视图;
[0049]
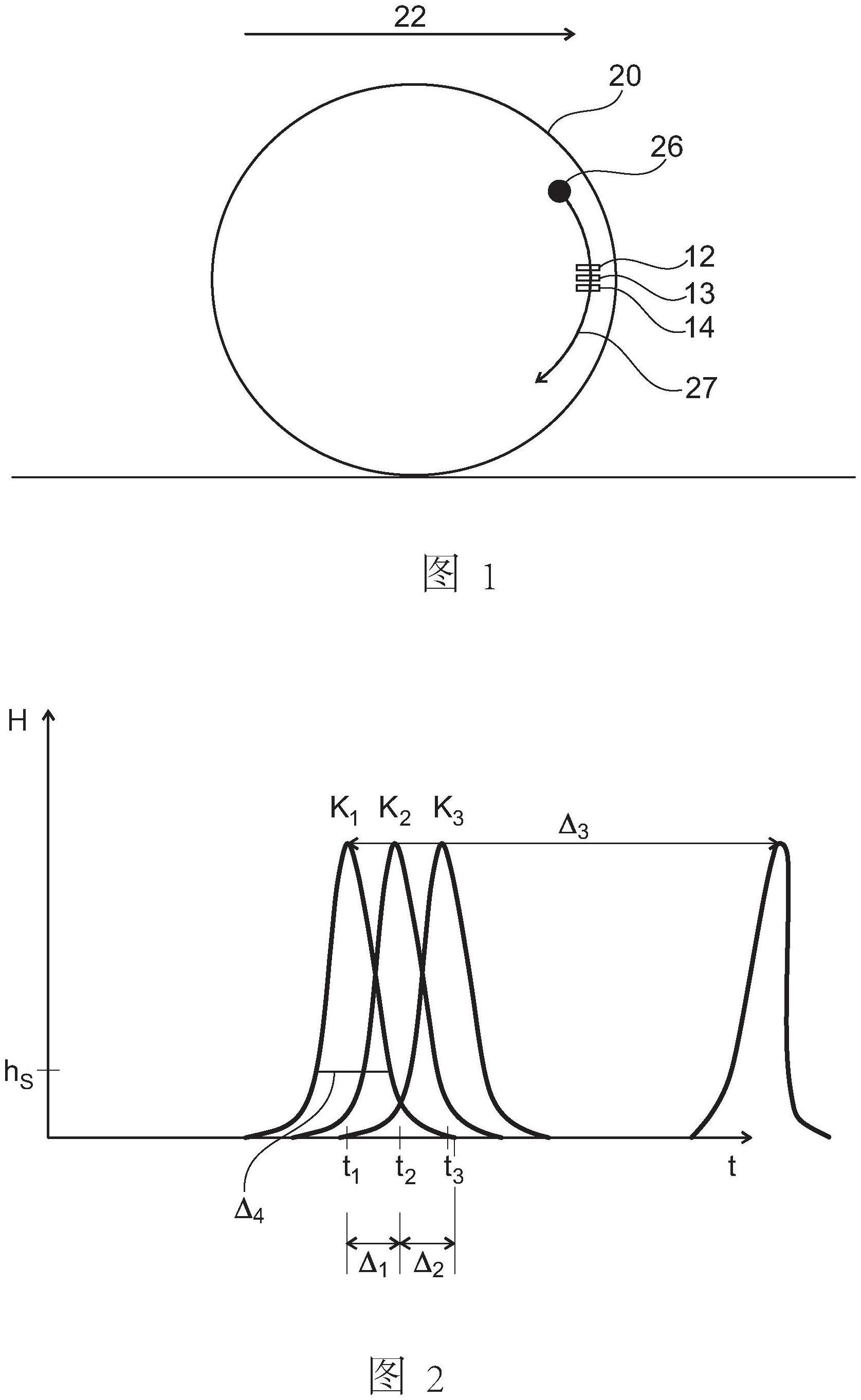
图2显示了磁场变化的示例性信号轮廓;
[0050]
图3显示了根据本发明的装置的传感器单元的简化结构;以及
[0051]
图4显示了磁场强度的预期曲线形状。
[0052]
下面借助于图1来说明根据本发明的装置的基本功能原理。
[0053]
图1中显示了车轮20,其上固定有磁铁26。车轮20是在方向22上移动的车辆的一部分。
[0054]
在方向22上的这种运动的结果是,磁铁26围绕车轮20的中心点做圆周运动27。根据本发明,例如三个传感器12、13、14设置在这个圆形运动27的路径上。这种设置使得磁铁26在其圆周运动27中依次经过传感器12、13、14。在运动经过的期间,磁铁的磁场被多个传感器同时测量到。传感器12、13、14例如可以是霍尔传感器,其可确定磁场强度或磁场的变化。
[0055]
作为示例,在图2中以简化的方式显示了通过传感器12、13、14确定的关于磁场的数据,它们在磁铁26被引导经过传感器12、13、14时被确定。
[0056]
在这种情况下,各自的磁场强度被绘制在纵坐标上,而横坐标代表时间曲线。
[0057]
在图2中显示了三条曲线k1、k2、k3,它们分别来自于传感器12、13、14。可以看出,由于根据本发明的高采样率,在每条曲线k1、k2、k3中都显示了磁场强度的准确轮廓,因此也显示了它的变化。
[0058]
根据本发明,这些数据可以不同的方式进行评估,以计算旋转速度,因此,通过已知的车轮20的周长,也可以计算车辆的速度。
[0059]
一种可能性是使用曲线k1在某一阈值hs上的时间长度δ4来确定磁铁的旋转速度
或圆周速度。这个时间长度δ4随着磁铁被引导经过相应的传感器12的速度而变化。换句话说,可以确定磁铁26本身的速度。如果不仅对曲线k1,而且对曲线k2和k3都进行这样的计算,就可以最大限度地减少篡改,这是因为更多的数据可以用于相同的评估。也可以使用多个阈值的数据。
[0060]
另一种可能性是评估曲线k1、k2、k3的某些点的时间间隔δ1和δ2。由此也可以得到车轮20上的磁铁26的速度。
[0061]
在另一个实施例中,可确定同一曲线k1的两个最大值之间的时间间隔δ3。通过这种方式,可以确定磁铁被再次引导经过同一个传感器12所需的时间。通过这个时间并结合已知的车轮20的周长,也可以确定速度。
[0062]
当然,也可以进行所述评估的组合。这对于增强防篡改保护来说优选的。
[0063]
确定篡改的另一种可能性是也评估曲线轮廓本身。例如,曲线轮廓的连续性,各自的斜率,各条曲线k1、k2、k3的斜率的相互比较,或者与理想的目标曲线值的比较,都可以用于这一目的。
[0064]
这样,可以识别出许多篡改,例如使用电磁铁来取代磁铁26,或其他人工磁场。
[0065]
下面参照图3来对根据本发明的传感器单元进行非常简洁的介绍。
[0066]
这里显示的传感器单元10有两个传感器12和13。具有两个a/d转换器41和42的微处理器40设置在传感器单元10的中心位置。这些转换器用于将来自设计成霍尔传感器的两个传感器12、13的信号数字化。此外,微处理器40具有输入和输出46,它与相应的接口51连接。该接口51与一条双线制线路54相连,该线路一方面用于供电,另一方面也用于传感器单元10的信号传输。
[0067]
一方面,上述的速度评估可以在微处理器40中进行。但另一方面,也可以只对数据进行数字化处理,以某种方式进行处理,并通过接口46、51经双线制线路54将数据传输到下游的评估单元。
[0068]
为了进一步保证数据传输的安全,可以规定通过双线制线路54进行的传输例如以加密的方式进行,或以另一种方式进行编码,从而使信号不能在线路本身进行交换。
[0069]
因此,使用根据本发明的用于确定车辆速度的数据的装置和根据本发明的方法,能够以基本上排除篡改的方式来确定这些数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1