光学自由曲面中低频段像差检测装置及方法
1.本发明涉及光学自由曲面检测技术领域,具体涉及一种光学自由曲面中低频段像差检测装置及方法。
背景技术:
2.由于光学自由曲面具有强大矫正像差和优化系统结构的能力,已逐渐成为国防、航空航天、军事等领域高速发展不可缺少的关键光学元件,其应用广度、生产发展的速度,已成为衡量一个国家科技水平的重要标志之一。然而,对于光学自由曲面高精度、高性能的要求增加了其加工和检测的难度,特别是加工制造过程中检测的难度,远比球面镜的加工与检测复杂和困难:高精度自由曲面光学关键元件的成功制造,不单单依赖数控机床的精度、先进光学设计、加工工艺,更有赖于自由曲面光学检测技术的综合考虑以及庞大复杂的数据演算和大量试验数据验证,才得以提高光学自由曲面的加工及检测质量;此外,光学自由曲面是一类非轴对称、不规则、随意构造的曲面,其形状比较复杂,精度要求很高,其没有一个明确的基准面,因此能否实现自由曲面的基准面和测量面之间的最佳匹配问题是自由曲面检测的关键,自由曲面面形精密检测仍是主要障碍,一些关键科学问题和技术瓶颈仍没有得到很好的解决,迄今为止仍没有统一成形的检测技术。所以,光学自由曲面加工及检测技术成为制约其应用和发展的最重要因素。
3.光学自由曲面是一类非轴对称、不规则且随意构造的曲面,对光学自由曲面高精度、高性能的要求增加了其加工和检测的难度,该难度远比球面镜的加工和检测复杂与困难。特别在研磨阶段及研磨向抛光过渡阶段的检测还存在较多局限:测量精度不够、技术不够成熟、检测周期过长、动态范围过小、无法进行全口径在位检测等。如现有技术:(1)三坐标测量机采用逐点扫描的方式进行测量,测量速度慢,无法一次性得到被测元件的全场面形数据;轮廓仪只能测量面形与球面基或非球面基偏离度较小的自由曲面(局部梯度与全局梯度的偏离小于5
°
才可测)。(2)摆臂式轮廓扫描法也面临着测量效率偏低及整体面形拼接过程中存在误差等问题,且目前只能测量离轴非球面类型的自由曲面,关于测量形状复杂、局部梯度变化大、面形数学表达较难的高自由度自由曲面的研究未见报道。(3)夏克-哈特曼波前检测法具有测量速度快、测量精度高及动态测量范围大等优势,但受透镜尺寸的限制以及大梯度自由曲面测量时光斑交叠的影响,该方法的横向测量分辨率不高,相应的测量精度易受分辨率的影响,而且不能进行研磨到抛光阶段的检测。(4)计算全息技术面临的问题是:一对一的补偿测量模式造成其测量通用性较差,从而检测成本较高;针对梯度较大的曲面元件,作为补偿器的cgh需要通过密度很高的衍射结构来实现大梯度波面的输出,因此计算全息的刻线密度受限于目前的微结构加工工艺水平。(5)部分零位补偿技术面临的问题是:测试光路越偏离零位条件光路,回程误差就越大,这为被检面形高精度恢复带来了很大难题;在部分零位补偿法检测自由曲面的过程中,待测件的对准较为困难,影响其面形检测精度;自由曲面非旋转对称性会导致干涉图产生非旋转对称形变,影响面形恢复精度。目前,对于更复杂的大梯度变化自由曲面,其成功应用案例较少。(6)倾斜波面技术测量
大口径自由曲面时,需要使用大口径标准补偿镜头,大口径标准补偿镜头的加工非常困难,限制了系统的测量口径。
技术实现要素:
4.本发明采用基于横向平移差异相位恢复(transverse translation diversity phase retrieval,ttdpr)来检测光学自由曲面中低频段像差的方法,设计一种兼顾高精度和大测量范围的光学自由曲面中低频段像差检测系统,以解决传统干涉仪无法检测非轴对称、非旋转对称的自由曲面这一难题。指导自由曲面光学元件在研磨阶段的面形加工,最终为高精度、高性能的光学自由曲面加工及检测提供技术支持。
5.光学自由曲面中低频段像差检测装置,该检测装置包括中低频段像差检测系统、光瞳图像监测系统、面形误差重构系统和光路夹持与装调系统;
6.待测自由曲面通过所述光路夹持与装调系统调整其与中低频段像差检测系统和光瞳图像监测系统的相位位置关系;
7.所述中低频段像差检测系统输出的光束传输至所述光瞳图像监测系统,经所述光瞳图像监测系统返回的波前再次进入所述中低频段像差检测系统,获得在焦以及离焦图像;
8.所述光瞳图像监测系统对中低频段像差检测系统输出的光束进行分光后获得光瞳图像;
9.所述光瞳图像监测系统包括分光棱镜、可调节孔径光阑、二维激光振镜、待测自由曲面、准直缩束光学系统和第二相机;经所述中低频段像差检测系统a1出射的平行光经过分光棱镜后进入二维激光振镜,从二维激光振镜出射的平行光打在待测自由曲面表面反射后的光束能够返回到二维激光振镜上,再经过可调节孔径光阑进入分光棱镜分光,其中一路原路返回,另一路进入准直缩束光学系统,成像于第二相机处,通过对图像分析,微调二维激光振镜,使得反射光束平行;
10.所述面形误差重构系统接收所述中低频段像差检测系统的在焦以及离焦图像,获得波前相位信息,并拟合获得离散参数,将所述离散参数作为优化目标;
11.所述面形误差重构系统将接收光瞳图像监测系统输出的光瞳图像作为调节所述光瞳图像监测系统中二维激光振镜的参考参数,实时对所述二维激光振镜调节,控制反射光束完全返回到所述中低频段像差检测系统中的第一相机,通过移动所述第一相机,实现在焦图像以及离焦图像的采集,并将所述在焦图像以及离焦图像通过计算机处理模块,获得待测自由曲面的面形;
12.通过调整所述光路夹持与装调系统,使待测自由曲面新的待测区域与原区域存在重叠率,并调整二维振镜的角度,实现新的待测区域面形误差的测量;多次调整所述光路夹持与装调系统,直到覆盖整个待测区域,对测量得到的三维面形误差数据采用匹配拼接sas法得到整个待测面形的数据。
13.本发明的有益效果:
14.本发明突破传统非球面检测方法,提出利用横向平移差异相位恢复法测量光学自由曲面,以解决光学自由曲面中低频段像差检测这一技术难题,指导自由曲面光学元件在研磨阶段的面形加工;最终为高精度、高性能的光学自由曲面加工及检测提供了技术支持,
具有非常重要的科学意义。
15.本发明装置由大尺寸二维精密位移台带动自由曲面光学测量系统实现在整个面型区域的子孔径拼接,辅以高精度振镜微调,实现整个自由曲面中低频段像差的高精度测量。从而解决光学自由曲面中低频段像差检测这一技术难题,有效地解决了自由曲面检测中动态范围与检测精度不可兼得的矛盾,为指导自由曲面光学元件在研磨阶段的面形加工及检测提供技术支持。
16.本发明将为光学自由曲面检测技术研究提供理论参考和技术支撑,将推动我国在高精度和大动态范围光学自由曲面检测技术领域的发展,促进高性能光电产品加工方面的进步,为打破国外在高精度自由曲面检测仪器和高性能光电产品加工上的垄断做出贡献。
附图说明
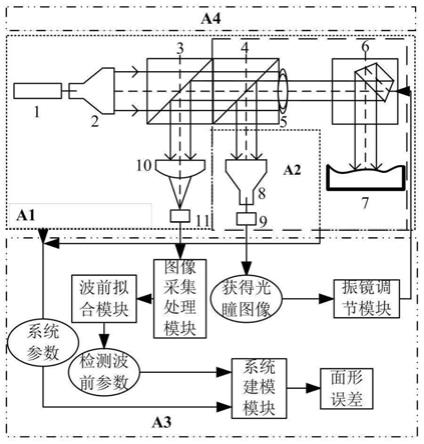
17.图1为本发明所述的光学自由曲面中低频段像差检测装置的原理图。
18.图2为光学自由曲面中低频段像差检测装置中的硬件结构示意图。
19.图中:1、激光器,2、扩束系统,3、分束器,4、分光棱镜,5、可调节光阑,6、偏振镜,7、待测自由曲面,8、缩束系统,9、第二相机,10、汇聚透镜,11、第一相机,12、安装板,13、z向导轨,14、y向导轨,15、工装件,16、x、y、z轴旋转台,17、气浮隔振平台。
具体实施方式
20.结合图1和图2说明本实施方式,光学自由曲面中低频段像差检测装置,主要由中低频段像差检测系统a1、光瞳图像监视系统a2、面形误差重构系统a3和光路夹持与装调系统a4组成。
21.所述中低频段像差检测系统a1由he-ne激光器1出射的细光束经准直扩束系统2被扩束为宽光束平行光(约20mm),该平行光向前传播至分束器3处被分为反射和透射两路光。一路透射光向前传播至光瞳图像监视系统a2,经由光瞳图像监视系统a2返回的波前重新进入中低频段像差检测系统a1经成像镜10成像于第一相机11处。he-ne激光器1放置在迷你调整架d1(四维复合调整架)上,迷你调整架d1可以为该he-ne激光器1提供俯仰以及偏摆二个方向的角度自由度。前后调整激光器1,通过对调整架d1进行精密调整,使得出射光线为平行光(采用剪切干涉仪测量光束质量)。第一相机11通过转接元件固定在高精度小型位移台m2上,转接元件与第一相机11、位移台m2之间采用螺钉连接,可以通过调节螺钉预应力实现第一相机11位姿的微调。前后移动位移台m2,可以在大范围内实现焦点搜寻以及离焦图像的采集,将采集后的在焦以及离焦图像送入计算机处理ttdpr算法,求解得到待测自由曲面的面形。
22.所述光瞳图像监测系统a2由分光棱镜4、可调节孔径光阑5、激光振镜6、待测自由曲面7、准直缩束光学系统8和第二相机9构成。从中低频段像差检测系统a1出射光束平行光经过分光棱镜4后进入高精度二维激光振6,从高精度二维激光振6出射光束经待测自由曲面7表面后反射的光束返回到二维激光振镜6上,再经过可调节孔径光阑5进入分光棱镜4分光,其中一路原路返回,另一路进入准直缩束光学系统8,成像于第二相机9处,通过对图像分析,微调激光振镜,使得反射光束尽量平行。准直缩束光学系统8通过螺纹连接固定在偏摆、俯仰二维调整架d2上,第二相机9采用大像元数小像元尺寸进行高精度光斑分析,实现
光路的准直,第二相机9通过转接板固定在五自由度位移台m1上,方便调节光路。
23.所述面形误差重构系统a3主要由图采集处理模块、波前拟合模块、振镜调节模块和系统建模模块组成,其主要实现的功能是自由曲面面形误差重构。
24.本实施方式中,通过自由曲面面形误差重构系统a3实现对待测自由曲面面形的检测,检测方法的步骤为:
25.1)首先利用中低频段像差检测系统和光瞳图像监视系统自身系统参数,输入系统建模模块,建立整体检测系统模型;
26.2)将中低频段像差检测系统中相机接收的在焦和离焦图像输入图像采集处理模块,得到波前相位信息,将该相位信息输入波前拟合模块,得到拟合后的离散参数,将该参数输入系统建模模块中,作为优化函数的优化目标;
27.3)将光瞳图像监控系统输出的光瞳图像信息输入至系统建模模块中,将光瞳图像监测系统获得的光瞳图像作为参考调节振镜的参数进入振镜调节模块,以便实时进行激光振镜调节,可以精确控制反射光束完全返回到中低频段像差检测系统的相机,通过移动相机,实现在焦图像以及离焦图像的采集,将采集后的在焦以及离焦图像送入计算机处理ttdpr程序,求解得到待测自由曲面的面形;
28.4)以上是从一个小孔径返回光束到达面形检测系统所测量面形误差的流程,移动y、z向导轨,使得新的待测区域与原区域存在一定的重叠率,并调整振镜角度重复以上重构过程实现新的待测区域面形误差的测量;
29.5)多次移动y向导轨和z向导轨,直到覆盖整个待测区域,对测量得到的三维面形误差数据采用匹配拼接sas法得到整个待测面形的数据。
30.本实施方式中,所述光路夹持与装调系统a4包括y向导轨14,z向导轨13,x、y、z轴旋转台16,安装板12,待测自由曲面夹持机构和气浮隔振平台17;待测自由曲面7通过光路夹持与装调系统a4调整其与中低频段像差检测系统a1和光瞳图像监测系统a2的相对位置关系。所述中低频段像差检测系统和光瞳图像监测系统被固定在一块安装板12上,该安装板12被固定于z向导轨13的滑块上,并随该滑块上下移动,或将所述安装板13锁紧于某一位置;所述z向导轨13的方向与中低频段像差检测系统中激光器1出射光方向垂直,并垂直固定于气浮隔振平台17上;
31.所述z向导轨13固定于y向导轨14的滑块上,y向导轨14水平固定于气浮隔振平台17上,其方向与光瞳图像监测系统a2的光轴方向垂直。同时,将x、y、z轴旋转台16固定在工装件15上。待测自由曲面夹持机构则固定在x、y、z轴旋转台17上,从而使得其夹持的待测自由曲面7可以实现绕x、y、z方向的旋转。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1