一种在单谐振腔内自动搜索双光梳的装置和算法的制作方法
1.本发明属于双光梳生成领域,尤其涉及一种在单谐振腔内自动搜索双光梳的装置和算法。
背景技术:
2.光学频率梳在频域上表现为绝对频率位置确定的等间隔分布的频率梳齿,在时域上则表现为重复频率固定的脉冲序列。时至今日,光学频率梳已成为高精度光谱应用的一种通用工具。
3.双光梳是一对具有微小重复频率差的光学频率梳,在时域表现为一对周期存在微小差异的脉冲序列。基于双光梳的测量精度更高,因此双光梳具有重大应用价值。然而,双光梳的实现装置复杂且需要十分精细的手动调节。双光梳源可大致分为基于双谐振腔的双光梳和基于单谐振腔的双光梳,前者结构复杂,成本高昂;后者结构简单,且两个光梳在同一个谐振腔内产生,共模噪声抑制更好,性能优越。
4.目前双光梳的产生都是通过手动调节谐振腔的偏振态、泵浦功率等参数来实现的,以偏振调节为例,双光梳状态的偏振解空间小,需要花费有经验的实验员数小时来将激光器调节为双光梳状态输出。此外,激光器容易在环境变化(温度变化、机械振动等)的影响下丢失双光梳输出,届时需要重新调节偏振态来恢复双光梳状态输出。可以看出,基于人工调节的双光梳生成既无法与自动化集成,其效率也十分低下。这点在基于单谐振腔的双光梳中尤为明显,因为需要在单谐振腔内平衡两种不同的纵模。因此,基于单谐振腔的智能双光梳技术应运而生,它结合了光学、电路和算法,通过反馈对谐振腔进行智能调控,从而使其自动输出理想的双光梳状态。如何利用算法对腔内诸多参数进行智能调控从而实现双光梳状态的智能搜索,是智能双光梳技术面临的难题。
5.在双光梳生成领域,目前暂无与本发明相近似的实现方案。
技术实现要素:
6.本发明为了解决上述现有技术中存在的缺陷和不足,提供了一种基于硬件反馈装置,使激光器自动工作在双光梳状态,并结合了双光梳判决算法和搜索算法,能够实现精准的双光梳自动搜索,改变目前通过人工调节来实现双光梳的局面,提升效率的在单谐振腔内自动搜索双光梳的装置和算法。
7.本发明的技术方案:一种在单谐振腔内自动搜索双光梳的装置,包括
8.数据采集器,负责从光学谐振腔的输出里面获取信息;
9.计算中心,负责对反馈获取的信息进行识别,运行算法和决策,给出指令到执行器;
10.执行器,负责对谐振腔内的参数进行变更,影响谐振腔的输出,形成反馈。
11.优选地,所述数据采集器采用模数转换器芯片或者示波器用于获取时域波形,或者采用光谱仪等装置用于获取光谱;所述计算中心采用电脑或者运算芯片;所述执行器包
含了激光器的泵浦、偏振控制器和压电陶瓷。
12.一种在单谐振腔内自动搜索双光梳的算法,:具体步骤如下:
13.在启动后,先去查询记忆库中有无经验执行状态,若有经验执行状态,则使用经验执行状态为最优化搜索算法进行初始化;若无经验执行状态,则对最优化搜索算法进行随机初始化;
14.在初始化完成后,最优化搜索算法会将初始执行状态赋予执行器,改变光学谐振腔的状态,从而改变数据采集器采集到的信息;
15.计算中心会对当前采集到的信息进行识别,来知悉当前的输出状态是否为双光梳状态;
16.若当前输出状态不是双光梳状态,则最优化搜索算法会根据采集的信息计算目标函数值,然后以最大化或最小化目标函数值为目的进行搜索,推导出新的执行状态,然后重复上述过程,激光器的输出状态会在最优化目标函数值的过程中越来越靠近双光梳状态,直至输出双光梳状态;
17.若当前输出状态为双光梳状态,则进入一个监控的环节,即探测双光梳状态是否丢失;若双光梳状态未丢失,则算法保持在监控状态;若监测到双光梳状态丢失,则算法会先将之前使得激光器输出双光梳状态的执行状态存储到记忆库中。
18.优选地,在外界环境变化不大的情况下,经验执行状态的附近存在能够使激光器输出双光梳的执行状态,使用经验执行状态进行初始化可以大幅加速搜索过程。
19.优选地,双光梳识别采用双光梳时域自动识别,其基于时域的脉冲计数。
20.优选地,双光梳时域自动识别的具体流程如下,在接收到时域波形后,进行动态地阈值选取,随后用该阈值进行脉冲计数;在完成计数后,将实际计数结果与理论计数结果进行对比,若计数结果错误,则当前波形不是双光梳状态;若计数结果正确,则继续判断当前波形是否为二次谐波锁模;若不是二次谐波锁模,则当前波形即为双光梳状态。
21.优选地,进行动态地阈值选取时,将阈值设定为当前波形最大电压值的一定比例;理论计数结果根据双光梳的周期和时域波形总时间计算而来。
22.优选地,其中二次谐波锁模是一种特殊的脉冲状态,理论上在一定时间内的脉冲数目与双光梳状态相同,但其相邻两个脉冲之间的间隔是固定不变的,对双光梳状态而言,相邻两个脉冲之间的间隔是一直在变化的,通过多次采样来获取相邻两个脉冲之间的间隔,从而区分二次谐波锁模和双光梳状态。
23.优选地,双光梳识别采用双波长双光梳光谱自动识别,双波长双光梳是单腔双光梳的一种,其光谱形状特别,有两个波长同时起振,可利用光谱形状比对,来对双波长双光梳状态进行自动识别。
24.优选地,双波长双光梳光谱自动识别的具体过程如下:首先,确定好理想双波长双光梳状态的光谱形状和相关参数,此状态即为作为标准的双波长双光梳状态;然后利用光谱获取单元获取当前激光器的输出光谱,逐点对采样光谱和标准光谱做归一化均方误差;并通过下述公式,计算出采样光谱与标准双波长双光梳状态的nmse,然后比较nmse与设定的阈值,如果nmse小于设定的阈值,则说
明当前激光器输出状态为双波长双光梳状态;如果不满足,则说明此状态不是双波长双光梳状态;其中a(k)代表测量光谱的幅值,代表标准双光梳状态的对应幅度值,k0代表计算的初始位置,k代表计算的截至位置。
25.本发明基于硬件反馈装置,使激光器自动工作在双光梳状态,并结合了双光梳判决算法和搜索算法,能够实现精准的双光梳自动搜索,改变目前通过人工调节来实现双光梳的局面,提升效率。
附图说明
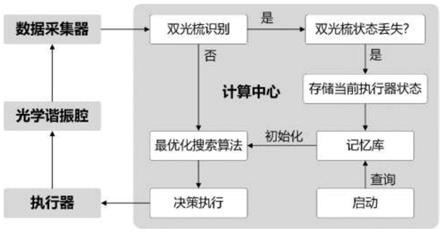
26.图1为本发明的流程图;
27.图2为本发明中基于时域波形的双光梳识别流程图;
28.图3为本发明中时域脉冲计数的波普图;
29.图4为本发明中双波长双光梳光谱的示意图;
30.图5为本发明中双波长双光梳光谱自动识别流程图。
具体实施方式
31.下面结合附图对本发明作进一步详细的说明,但并不是对本发明保护范围的限制。
32.如图1所示,一种在单谐振腔内自动搜索双光梳的装置,包括:数据采集器,负责从光学谐振腔的输出里面获取信息,数据采集器可以是模数转换器(adc)芯片、示波器等装置用于获取时域波形,也可以是光谱仪等装置用于获取光谱;计算中心,负责对反馈获取的信息进行识别,运行算法和决策,给出指令到执行器,计算中心既可以是电脑,也可以是各种运算芯片;执行器,对谐振腔内的参数进行变更,影响谐振腔的输出,形成反馈,执行器则包含了激光器的泵浦、偏振控制器、压电陶瓷等。
33.一种在单谐振腔内自动搜索双光梳的算法,其创新性地引入了记忆机制,结合最优化搜索算法,能够实现快速地双光梳自动锁定,具体流程(如图1所示),在启动后,算法会先去查询记忆库中有无经验执行状态(即以前搜索中保存下来的执行状态),若有经验执行状态,则使用经验执行状态为最优化搜索算法进行初始化,因为在外界环境变化(温度、应力等)不大的情况下,经验执行状态的附近存在能够使激光器输出双光梳的执行状态。因此,使用经验执行状态进行初始化可以大幅加速搜索过程;若无经验执行状态,则对最优化搜索算法进行随机初始化。
34.在初始化完成后,最优化搜索算法会将初始执行状态赋予执行器,改变光学谐振腔的状态,从而改变数据采集器采集到的信息。
35.计算中心会对当前采集到的信息进行识别,来知悉当前的输出状态是否为双光梳状态,双光梳识别可以基于时域的脉冲计数,也可以基于光谱形状比对。若当前输出状态不是双光梳状态,则最优化搜索算法会根据采集的信息计算目标函数值,然后以最大化(或最小化,取决于目标函数的定义)目标函数值为目的进行搜索,推导出新的执行状态,然后重复上述过程,激光器的输出状态会在最优化目标函数值的过程中越来越靠近双光梳状态,直至输出双光梳状态。
36.若当前输出状态为双光梳状态,则进入一个监控的环节,即探测双光梳状态是否
丢失。若双光梳状态未丢失,则算法保持在监控状态;若监测到双光梳状态丢失,则算法会先将之前使得激光器输出双光梳状态的执行状态存储到记忆库中。
37.如图2所示,双光梳时域自动识别的流程如下,在接收到时域波形后,进行动态地阈值选取(将阈值设定为当前波形最大电压值的一定比例),随后用该阈值进行脉冲计数。在完成计数后,将实际计数结果与理论计数结果(根据双光梳的周期和时域波形总时间计算而来)进行对比,若计数结果错误,则当前波形不是双光梳状态;若计数结果正确,则继续判断当前波形是否为二次谐波锁模。若不是二次谐波锁模,则当前波形即为双光梳状态。
38.二次谐波锁模是一种特殊的脉冲状态,理论上在一定时间内的脉冲数目与双光梳状态相同,但其相邻两个脉冲之间的间隔是固定不变的。对双光梳状态而言,相邻两个脉冲之间的间隔是一直在变化的。因此,可以通过多次采样来获取相邻两个脉冲之间的间隔,从而区分二次谐波锁模和双光梳状态。
39.图3中展示了时域脉冲计数的原理,实线为双光梳的时域波形,可以看到在一个周期内存在两个脉冲;虚线为计数阈值,高于此阈值的脉冲会被计数。
40.双波长双光梳是单腔双光梳的一种,其光谱形状特别,有两个波长同时起振(两个峰值),如图4所示,因此可以利用光谱来对双波长双光梳状态进行自动识别。
41.如图5所示,双波长双光梳光谱自动识别的具体过程如下:
42.首先,确定好理想双波长双光梳状态的光谱形状和相关参数等,此状态即为作为标准的双波长双光梳状态;然后利用光谱获取单元获取当前激光器的输出光谱,逐点对采样光谱和标准光谱做归一化均方误差;
43.nmse:(normalized mean square error)计算公式,a(k)代表测量光谱的幅值,代表标准双光梳状态的对应幅度值,k0代表计算的初始位置,k代表计算的截至位置。
44.【注】这里的公式要包括rms、nrms等各种公式的计算方法。
45.通过上述公式,可以计算出采样光谱与标准双波长双光梳状态的nmse,比较nmse与设定的阈值,如果nmse小于设定的阈值,则说明当前激光器输出状态为双波长双光梳状态;如果不满足,则说明此状态不是双波长双光梳状态。
46.图5中(dcs:标准的双波长光谱,dual-color spectrum,nmse:归一化均方差,normalized mean square error,threshold:设定的阈值)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1