一种基于GNSS/UWB/DBA融合的室内外无缝切换定位方法
一种基于gnss/uwb/dba融合的室内外无缝切换定位方法
技术领域
1.本发明属于定位导航技术领域,具体是一种基于gnss/uwb/dba融合的室内外无缝切换定位方法。
背景技术:
2.全球卫星导航系统(global navigation satellite system, gnss)作为重要的时空基础设施,为全球用户提供全球性、全天候、全方位、高精度的定位、导航和授时(positioning navigation timing, pnt)服务,基本满足室外用户大多数场景下的位置服务需求,得到了广泛的应用。但在树下、城市峡谷、隧道、矿坑深部、室内等复杂环境中,gnss存在严重的多路径效应、信号衰减以及可视卫星较少等问题,极大限制了gnss的可用性和应用范围,无法满足多等级大众用户对室内外无缝定位“最后一公里”的应用需求。超宽带(ultra-wide band, uwb)较其他技术具有安全性高、功耗低、穿透性能强、抗干扰强、传输速率高、定位精度高(10~20 cm)等一系列优点,已经成为室内定位的首选技术。uwb采用到达时间(time of arrive, toa)或到达时间差(time difference of arrive, tdoa)技术获取用户三维位置分别至少需要布设3或4个以上基站,实现室内三维定位较平面定位同时需要增设布设大量基站,成本较高,而且需要基站在垂直方向上布设时错开一定的距离,布设难度高。低成本气压计差分气压测高(differential barometer altimeter, dba)技术获取的相对高程精度较高(室内可优于0.3m,室外优于1m),且不受环境限制、室内外均可使用,可有效分辨室内楼层和室外辅助约束gnss提高定位精度。室内外过渡区域是无缝定位的纽带区域,也是室外定位信号和室内定位信号均受到严重遮挡或干扰的区域,由于多种复杂环境形成的导航盲区无法通过单一传感器解决,采用多源传感器融合定位已成为解决室内外无缝切换定位的主流技术路线。
技术实现要素:
3.本发明为了提升用户终端在室内及室内外无缝切换定位、城市遮挡、灾害救援等复杂环境下精密定位导航能力,提供一种基于gnss/uwb/dba融合的室内外无缝切换定位方法。
4.本发明采取以下技术方案:一种基于gnss/uwb/dba融合的室内外无缝切换定位方法,包括s1:室内环境通过uwb和dba组合实现三维定位;s2:室内外无缝切换场景通过gnss、uwb和dba多源传感器组合实现三维定位;s3:室外环境采用gnss和dba组合实现三维定位。
5.s1的具体实现方法为:将uwb主、从基站布设在同一高度的平面内,其三维位置事先测定,uwb主基站和移动标签上同时集成放置低成本气压计,以uwb主基站高程作为dba模型高程基准,构建uwb/dba组合三维定位模型,该模型融合了uwb和dba两种信号源,以高精度测距和气压观测值为基础联合解算获得移动用户的三维坐标信息。
6.所述的uwb/dba组合三维定位模型如式1所示,
(1)式中,为uwb主基站bs1已知坐标,从基站平面坐标为,标签位置为,为tdoa测量值,为bs1处气压模块读数,为tag处气压模块读数,为bs1和tag之间平均摄氏温度,即,为bs1处温度,为tag处温度。
7.s2的具体实现步骤为:s21:在用户从室内到室外无缝切换过渡阶段,判断可见的uwb基站小于3个和gnss卫星不足4颗时作为阈值条件自动切换为室内外无缝切换场景解算模式;s22:获取gnss基准站、移动站观测数据以及广播星历数据;获取uwb基站坐标及tdoa数据;获取dba数据并处理转换为高程数据;s23:gnss、uwb、dba观测数据时间同步匹配;s24:构建gnss/uwb/dba组合三维定位模型;s25:联合解算获得移动用户的三维坐标信息,实现室内外的连续定位。
8.s24中,gnss/uwb/dba组合三维定位模型如式2所示,(2)上式中,第1、2行中表示gnss观测值之间的双差算子,i和j表示参考站和流动站,k和s为参考星和非参考星,和表示gnss码伪距和载波相位双差观测值,表示双差站星距,表示双差码伪距观测噪声,表示双差模糊度,表示双差相位观测噪声;第3、4行中为uwb tdoa观测值,为m个uwb基站三维坐标,为用户三维坐标;第5行为利用dba高程h构建的近似椭球约束方程,等效于增加一颗位于地心的虚拟卫星,a和b分别为地球参考椭球长、短半轴。
9.gnss/uwb/dab融合定位模型的随机模型为:
ꢀꢀꢀꢀꢀꢀꢀꢀ
(15)式15中,、、分别为gnss双差观测量、uwb的tdoa观测量、dba高程的方差-协方差矩阵。
10.s25中,gnss/uwb/dba组合三维定位模型的解算包括以下步骤,步骤1:将式2中gnss双差观测方程线性化,在近似位置处采用泰勒级数展开后并化简可得:(3)式3中,,,为方向余弦,m=s-1为双差方程数量,,为伪距和载波相位观测值向量。
11.步骤2:将uwb tag在近似位置处采用泰勒级数展开后并化简可得:(4)式4中,为uwb观测值向量,为各bs到tag的近似距离,,,分别为各bs到tag的方向余弦,其中。
12.步骤3:采用微分处理法求解dba高程地球椭球约束方程,即将椭球约束方程在用户的近似位置按照泰勒级数展开,仅保留一阶项,将式2第5行两边对求偏微分得:(5)整理得:
ꢀꢀꢀ
(6)同理对和求偏微分可得:(7)(8)由此可得
ꢀꢀꢀꢀꢀꢀ
(9)
其中,,,为观测值,h为da获取的高程值,为用户在近似位置转换得到的大地高;步骤4:联合式3、式4和式9组成gnss/uwb/dba融合定位平差模型为:,p1ꢀꢀꢀ
(10)式中,,,,分别表示观测向量、设计矩阵、待估参数和残差,p1为gnss/uwb/dba融合定位观测值的先验权阵,p1为式15中的逆矩阵。
13.步骤5:采用单历元加权最小二乘平差方法进行参数估计:
ꢀꢀꢀꢀ
(11)式中,为参数的方差-协方差矩阵。
14.步骤6:采用最小二乘降相关算法(least square ambiguity decorrelation adjustment, lambda)进行双差模糊度固定,设置ratio阈值为3,如果能够通过验证,将位置参数的浮点解转换为固定解,否则输出浮点解结果。
15.s3中,构建的gnss/dba组合三维定位模型为:,p2随机模型为:式中,同样、分别为gnss双差观测量、dba高程的方差-协方差矩阵,观测值向量权阵p2即为s3中的逆矩阵。
16.与现有技术相比,本发明提供一种基于gnss/uwb/dba三种手段进行融合的室内外无缝切换定位方法,室内采用uwb/dba组合实现高精度三维定位,相比采用纯uwb实现室内三维定位可减少uwb基站的布设数量节省系统建设成本,又可大幅降低uwb基站布设的难度;室内外无缝切换采用gnss/uwb/dba多源传感器融合和室外采用gnss/dba组合定位,融合模型简单且精度较高,实现各系统优势互补,可显著提升用户终端在室内及室内外无缝切换定位、城市遮挡、灾害救援等复杂环境下精密定位导航能力。
附图说明
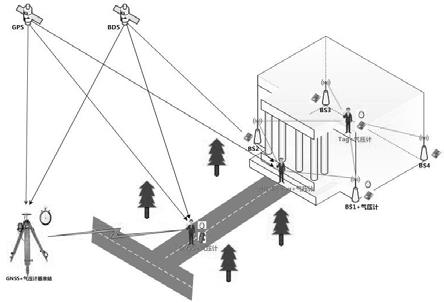
17.图1为本发明总体方案设计图;图2为 gnss/uwb/dba组合室内外无缝定位算法流程图。
具体实施方式
18.发明内容的总体技术路线如图1所示,具体方案为:包括s1:室内环境通过uwb和dba组合实现三维定位;s2:室内外无缝切换场景通过gnss、uwb和dba多源传感器组合实现三维定位;s3:室外环境采用gnss和dba组合实现三维定位。
19.s1:室内uwb/dba组合三维定位:室内三维位置通过uwb基站仅布设在平面获取平面位置和低成本气压计dba技术获取精确相对高程来实现。对于采用tdoa测距的uwb系统,将uwb主、从基站布设在基本同一高度的平面内,其三维位置可通过全站仪事先测定,uwb主基站和移动标签上同时集成放置低成本气压计,uwb主基站高程作为dba模型高程基准,构建的uwb/dba组合三维定位模型融合了uwb和气压计两种信号源,以高精度测距和气压观测值为基础即可联合解算获得移动用户的三维坐标信息。
20.uwb/dba组合三维定位观测方程如式(1)所示,其中第一式为uwb基于到达时间差(tdoa)二维定位观测方程(又称为双曲线定位);第二式为通过大气静力平衡方程推导得到的简化dba公式。
21.(1)上式中,为uwb主基站bs1已知坐标,从基站平面坐标为,标签位置为,为tdoa测量值,为bs1处气压模块读数,为tag处气压模块读数,为bs1和tag之间平均摄氏温度,即,为bs1处温度,为tag处温度。
22.s2:gnss/uwb/dba组合室内外无缝定位:s21:在用户从室内到室外无缝切换过渡阶段,判断可见的uwb基站小于3个和gnss卫星不足4颗时作为阈值条件自动切换为室内外无缝切换场景解算模式;s22:获取gnss基准站、移动站观测数据以及广播星历数据;获取uwb基站坐标及tdoa数据;获取dba数据并处理转换为高程数据;s23:gnss、uwb、dba观测数
据时间同步匹配;s24:构建gnss/uwb/dba组合三维定位模型;s25:联合解算获得移动用户的三维坐标信息,实现室内外的连续定位。
23.在室内外无缝切换过渡场景下,gnss采用差分模式,基准站上同时布设气压模块提供差分补偿修正,用户终端与部分uwb基站可视。此时单一传感器由于可用观测值数量不足无法很好定位,而采用gnss/uwb/dba融合可实现无缝切换,增加uwb和dba观测数据相当于增加多个位于用户接收机附近和一个位于地心的卫星伪距观测值,可有效改善观测值空间几何结构、降低pdop值,实现室内外的连续定位。
24.1)函数模型具体的gnss/uwb/dba融合定位函数模型如下:(2)上式中,第1、2行中表示gnss观测值之间的双差算子,i和j表示参考值和流动站,k和s为参考星和非参考星,和表示gnss码伪距和载波相位双差观测值,表示双差站星距,表示双差码伪距观测噪声,表示双差模糊度,表示双差相位观测噪声;第3、4行中为uwb tdoa观测值,为m个uwb基站三维坐标,为用户三维坐标;第5行为利用dba高程h构建的近似椭球约束方程,等效于增加一颗位于地心的虚拟卫星,a和b分别为地球参考椭球长、短半轴。
25.在用户从室内到室外无缝切换过渡阶段,判断可见的uwb基站小于3个和gnss卫星不足4颗时作为阈值条件自动切换解算模式,根据多传感器观测值组成观测方程和定权矩阵,随机模型首先根据传感器观测值先验方差进行构建。具体求解步骤如下:步骤1:将式(2)中gnss双差观测方程线性化,在近似位置处采用泰勒级数展开后并化简可得:(3)式3中,,,为方向余弦,m=s-1为双差方程数量,,为伪距和载波相位观测值向量。
26.步骤2:将uwb tag在近似位置处采用泰勒级数展开后并化简可得:
(4)式4中,为uwb观测值向量,为各bs到tag的近似距离,,,分别为各bs到tag的方向余弦,其中。步骤3:采用微分处理法求解dba高程地球椭球约束方程,即将椭球约束方程在用户的近似位置按照泰勒级数展开,仅保留一阶项。将式(2)第5行两边对求偏微分得:(5)整理得:
ꢀꢀꢀ
(6)同理对和求偏微分可得:(7)(8)由此可得(9)其中,,,为观测值,h为dba获取的高程值,为用户在近似位置转换得到的大地高。
27.步骤4:联合式(3)、(4)和(9)组成gnss/uwb/dba融合定位平差模型为:,p1ꢀꢀꢀ
(10)
式中,,,,分别表示观测向量、设计矩阵、待估参数和残差,p1为gnss/uwb/dba融合定位观测值的先验权阵。
28.步骤5:采用单历元加权最小二乘平差方法进行参数估计:(11)式中,为参数的方差-协方差矩阵。
29.步骤6:采用最小二乘降相关(lambda)算法进行双差模糊度固定,设置ratio阈值为3,如果能够通过验证,将位置参数的浮点解转换为固定解,gnss相对定位模型双差模糊度具有整数特性,通过固定双差模糊度可以显著提高定位精度。否则输出浮点解结果。
30.2)随机模型gnss非差观测值随机模型采用正弦三角函数高度角定权模型:(12)其中,factor表示观测值类型的权分配因子,当观测值类型为载波相位时赋为1;当观测值类型为伪距时赋为100;a,b通常同时取0.003m。根据误差传播定律,gnss双差相对定位方差-协方差矩阵可表示为:(13)上式中,为gnss双差观测量协方差矩阵,为单差-双差线性变换系数矩阵,其中e为,m
×
m单位矩阵,i为m维的单位矢量,m=s-1为双差方程数目,和分别表示gnss系统码伪距和载波相位站间单差协方差矩阵。
31.对于采用toa测量值定位的uwb系统而言,各个toa测量值互相独立,且均为零均值和方差为的随机变量。可根据现场标定检测确定,一般优于
0.1 ~0.2 m,则其观测方程的协方差矩阵为。对于采用tdoa测量值进行定位的uwb系统,由于均存在,因此各之间是相互关联的,此时uwb tdoa测量值的协方差矩阵可表示为:(14)dba系统获得的高程精度可根据实际评估结果确定,根据以上结果,gnss/uwb/dab融合定位模型的随机模型可以表示为:(15)式15中,、、分别为gnss双差观测量、uwb的tdoa观测量、dba高程的方差-协方差矩阵。式11中观测值向量权阵p1即为式15中的逆矩阵。
32.根据以上步骤,具体的gnss/uwb/dba融合数据处理流程如图2所示:s3:gnss/dba组合室外定位:进入室外环境下,由于距离较远,uwb不再可用,而dba在室外高程精度可靠有效范围可达十几公里,基本与gnss rtk/rtd作业范围相近。因此,室外环境下仅采用gnss/dba组合实现开阔或复杂城市环境下的定位精度提升,具体的观测方程与第2部分中式2中第一、二、五行一致,对应的函数模型求解过程与式3、式5~11一致,这里不在赘述,随机模型可表述为:(16)式16中,同样、分别为gnss双差观测量、dba高程的方差-协方差矩阵。观测值向量权阵p2即为式16中的逆矩阵。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1