一种道岔3D扫查器的制作方法
一种道岔3d扫查器
技术领域
1.本发明涉及钢轨探伤技术领域,具体涉及一种道岔3d扫查器。
背景技术:
2.中国铁路逐渐从追赶转向引领,路网越来越密,营运里程已达13.9万公里以上,同时客货运量也在不断增长。钢轨是线路上部建筑中直接承受机车车辆各种负载的部分。铺设在线路上的钢轨在机车车辆作用下,又由于养护和气候条件等不同,在使用过程中极易发生各种各样的损伤。因此,加强探伤检查,及时更换损伤钢轨,是综合机电工建部门保证行车安全的一项重要措施。在钢轨的各个环节中,道岔是一种使机车车辆从一股道转入另一股道的线路连接设备,也是轨道的薄弱环节之一,通常在车站和编站组大量铺设。
3.道岔是铁路线网不可或缺的一部份,道岔探伤是钢轨探伤中的重点难点,近几年随着营运负荷的加重,道岔损伤、断轨等事故时有发生,而钢轨道岔部分由于探伤面存在多样性,且探伤部位存在不易触及,操作空间狭小,存在危险性等各方面因素,目前道岔探伤大部分部位使用手工单探头、局部采用简单的扫查装置探伤,探伤覆盖小且效率十分低下,在使用过程中不利于安装和便携,给人们的使用过程带来了一定的不利影响。
技术实现要素:
4.本发明所要解决的技术问题是提供一种道岔3d扫查器,这种道岔3d扫查器能够实现对道岔的自动3d扫查,便于让探伤人员直观地对道岔对应位置的3d图像进行分析,快速观察图像中各个伤损及其分布情况,可有效避免出现漏判误判。采用的技术方案如下:一种道岔3d扫查器,其特征在于:包括轨行座、编码轮、主动轮、用于驱动主动轮转动的驱动装置、至少一个带磁导向轮、横移座、辅助轮、带磁探头环、超声波探头和用于驱动带磁探头环升降的升降机构;驱动装置安装在轨行座上;编码轮、主动轮均可转动安装在轨行座上并且前后并排设置,编码轮、主动轮的轴线为左右走向;带磁导向轮可转动安装在轨行座上且其轴线为上下走向,带磁导向轮处在主动轮的左下方或右下方;横移座可左右滑动安装在轨行座上,辅助轮可转动安装在横移座上且其轴线为左右走向,辅助轮处在主动轮的左侧或右侧;升降机构安装在横移座上并处于主动轮与辅助轮之间,带磁探头环可转动安装在升降机构的动力输出端上且其轴线为上下走向,带磁探头环处于带磁导向轮的下方,超声波探头可转动安装在带磁探头环中且其轴线为前后走向;所述道岔3d扫查器通过驱动装置和升降机构驱动超声波探头沿自上至下的弓字形路径对扫查范围内的心轨或翼轨进行全覆盖扫查,生成心轨或翼轨不同深度位置的多个b型扫查视图,再通过对各个b型扫查视图的水平截面切片图像进行叠加计算分析,可得到扫查范围内心轨或翼轨的3d伤损图像。
5.使用时,将上述道岔3d扫查器放置到道岔的合适位置,并使主动轮和编码轮行走于翼轨上面,辅助轮行走于道岔的心轨或另一翼轨上面,带磁导向轮通过磁力吸附并行走于该翼轨的轨头侧面,超声波探头利用带磁探头环与心轨之间磁力作用紧贴于心轨侧面,
并保持合适的压紧力;编码轮用于采集道岔3d扫查器扫查移动的距离;带磁导向轮用于实现道岔3d扫查器整体的横向定位,并通过辅助轮与编码轮、主动轮相配合可使道岔3d扫查器整体保持平衡;通过带磁探头环与心轨或另一翼轨的相互吸附,使横移座随之沿横向滑动实现自动调节,同时由于带磁探头环可转动安装在升降机构的动力输出端上且其轴线为上下走向,超声波探头可转动安装在带磁探头环中且其轴线为前后走向,这样可使得超声波探头具有两个转动自由度,进而使得无论岔道汇合、张开、平行的情况下,超声波探头的探头面都能够与心轨或另一翼轨的侧面自动贴附,可有效避免出现漏判误判。
6.进行扫查时,在设置好初始深度及扫查范围等参数后,先由驱动装置驱动主动轮转动,带动道岔3d扫查器整体向前移动,使主动轮和编码轮行走于翼轨上面,辅助轮行走于道岔的心轨或另一翼轨上面,带磁导向轮吸附并吸走于该翼轨的轨头侧面,超声波探头紧贴于心轨或翼轨侧面并向前移动扫查,生成心轨或翼轨第一个深度位置的b型扫查视图(b型扫查视图可采用水平截面切片图像进行显示,图像中纵坐标(y)表示扫描的深度,横坐标(x)表示扫查移动的距离);直至当道岔3d扫查器向前移动至扫查范围的终点时,驱动装置使主动轮停止转动,同时升降机构驱动带磁探头环和超声波探头下降一个单位深度的距离,再由驱动装置驱动主动轮反向转动,驱动道岔3d扫查器整体向后移动,使超声波探头紧贴于心轨或翼轨侧面并向后往回扫查,生成心轨或翼轨第二个深度位置的b型扫查视图;如此往复,可使超声波探头呈弓字形路径对扫查范围内的心轨或翼轨进行全覆盖扫查,生成心轨或翼轨不同深度位置的多个b型扫查视图;最后,通过对多个b型扫查视图的水平截面切片图像进行叠加计算分析,可得到扫查范围内心轨或翼轨的3d伤损图像。上述道岔自动3d扫查器通过驱动装置和升降机构驱动超声波探头沿自上至下的弓字形路径对扫查范围内的心轨或翼轨进行全覆盖扫查,生成心轨或翼轨不同深度位置的多个b型扫查视图,再通过对各个b型扫查视图的水平截面切片图像进行叠加计算分析,可得到扫查范围内心轨或翼轨的3d伤损图像,便于让探伤人员直观地对道岔对应位置的3d图像进行分析,快速观察图像中各个伤损及其分布情况,可有效避免出现漏判误判。另外,超声波探头可以采用干耦合的形式实现对心轨或翼轨耦合,结合心轨或翼轨的特征,利用宽声束,高能量的超声波探头,实现每次扫查的过程,超声波声束均能够较大面积的覆盖心轨或翼轨,防止漏检,提高检测效率。
7.优选方案中,所述驱动装置包括第一驱动电机、环形同步带和两个传动带轮,主动轮通过一左右走向的转轴可转动安装在所述轨行座上,第一驱动电机安装在轨行座上,其中一传动带轮固定安装在第一驱动电机的输出轴上,另一传动带轮固定安装在转轴上,两个传动带轮共同将环形同步带张紧。通常,第一驱动电机采用步进电机或伺服电机。工作时,第一驱动电机驱动相应的传动带轮转动,通过环形同步带带动另一传动带轮转动,再通过转轴带动主动轮转动,为道岔3d扫查器提供动力。
8.优选方案中,所述升降机构包括竖直导轨、升降直齿条、第二驱动电机和蜗轮,竖直导轨安装在所述横移座上,升降直齿条安装在竖直导轨中并与竖直导轨滑动配合,第二驱动电机安装在横移座上,蜗轮固定安装在第二驱动电机的输出轴上并与升降直齿条相啮合;所述带磁探头环可转动安装在升降直齿条上。通常,第二驱动电机采用步进电机或伺服电机。工作时,第二驱动电机驱动蜗轮转动,通过升降直齿条与蜗轮之间的配合,带动升降直齿条及其上的带磁探头环和超声波探头沿竖直导轨上升或下降一定高度。
9.优选方案中,所述轨行座上安装有至少两个左右走向的导向杆,所述横移座上安装有至少两个导向套,各个导向套分别套接在相应的导向杆并与该导向杆滑动配合。横移座能够通过各个导向杆与各个导向套之间的配合安装在轨行座上,使横移座可沿各个导向杆在左右方向上自由滑动,确保辅助轮能够始终行走于道岔的心轨上面。上述导向杆一般采用截面为圆形的导向轴,上述导向套一般采用直线轴承。
10.一种具体方案中,所述带磁导向轮的数量为两个,两个带磁导向轮前后并排设置。这样,可使对道岔3d扫查器整体的横向定位更稳固,使道岔3d扫查器在扫查移动时整体的平衡性更好。
11.本发明的道岔自动3d扫查器可放置到道岔的合适位置,能够实现对道岔的自动3d扫查,并且在扫查时可通过驱动装置和升降机构驱动超声波探头沿自上至下的弓字形路径对扫查范围内的心轨或翼轨进行全覆盖扫查,生成心轨或翼轨不同深度位置的多个b型扫查视图,再通过对各个b型扫查视图的水平截面切片图像进行叠加计算分析,可得到扫查范围内心轨或翼轨的3d伤损图像,便于让探伤人员直观地对道岔对应位置的3d图像进行分析,快速观察图像中各个伤损及其分布情况,可有效避免出现漏判误判。另外,超声波探头可以采用干耦合的形式实现对心轨或翼轨耦合,结合心轨或翼轨的特征,利用宽声束,高能量的超声波探头,实现每次扫查的过程,超声波声束均能够较大面积的覆盖心轨或翼轨,防止漏检,提高检测效率。
附图说明
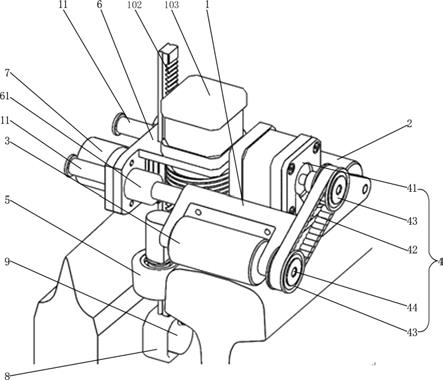
12.图1是本发明优选实施例道岔自动3d扫查器的结构示意图。
13.图2是图1所示道岔自动3d扫查器中横移座、升降机构、带磁探头环和超声波探头之间连接、配合的示意图。
具体实施方式
14.如图1、图2所示,这种道岔3d扫查器包括轨行座1、编码轮2、主动轮3、用于驱动主动轮3转动的驱动装置4、至少一个带磁导向轮5、横移座6、辅助轮7、带磁探头环8、超声波探头9和用于驱动带磁探头环8升降的升降机构10;驱动装置4安装在轨行座1上;编码轮2、主动轮3均可转动安装在轨行座1上并且前后并排设置,编码轮2、主动轮3的轴线为左右走向;带磁导向轮5可转动安装在轨行座1上且其轴线为上下走向,带磁导向轮5处在主动轮3的左下方;横移座6可左右滑动安装在轨行座1上,辅助轮7可转动安装在横移座6上且其轴线为左右走向,辅助轮7处在主动轮3的左侧;升降机构10安装在横移座6上并处于主动轮3与辅助轮7之间,带磁探头环8可转动安装在升降机构10的动力输出端上且其轴线为上下走向,带磁探头环8处于带磁导向轮5的下方,超声波探头9可转动安装在带磁探头环8中且其轴线为前后走向;所述道岔3d扫查器通过驱动装置4和升降机构10驱动超声波探头9沿自上至下的弓字形路径对扫查范围内的心轨或翼轨进行全覆盖扫查,生成心轨或翼轨不同深度位置的多个b型扫查视图,再通过对各个b型扫查视图的水平截面切片图像进行叠加计算分析,可得到扫查范围内心轨或翼轨的3d伤损图像。
15.在本实施例中,轨行座1上安装有两个左右走向的导向杆11,横移座6上安装有两个导向套61,两个导向套61分别套接在相应的导向杆11。横移座6能够通过各个导向杆11与
各个导向套61之间的配合安装在轨行座1上,使横移座6可沿各个导向杆11在左右方向上自由滑动,确保辅助轮7能够始终行走于道岔的心轨上面。导向杆11一般采用截面为圆形的导向轴,导向套61一般采用直线轴承。
16.在本实施例中,带磁导向轮5的数量为两个,两个带磁导向轮5前后并排设置。这样,可使对道岔3d扫查器整体的横向定位更稳固,使道岔3d扫查器在扫查移动时整体的平衡性更好。
17.在本实施例中,驱动装置4包括第一驱动电机41、环形同步带42和两个传动带轮43,主动轮3通过一左右走向的转轴44可转动安装在轨行座1上,第一驱动电机41安装在轨行座1上,其中一传动带轮43固定安装在第一驱动电机41的输出轴上,另一传动带轮43固定安装在转轴44上,两个传动带轮43共同将环形同步带42张紧。通常,第一驱动电机41采用步进电机或伺服电机。
18.在本实施例中,升降机构10包括竖直导轨101、升降直齿条102、第二驱动电机103和蜗轮104,竖直导轨101安装在横移座6上,升降直齿条102安装在竖直导轨101中并与竖直导轨101滑动配合,第二驱动电机103安装在横移座6上,蜗轮104固定安装在第二驱动电机103的输出轴上并与升降直齿条102相啮合;带磁探头环8通过轴套81可转动安装在升降直齿条102的下端。通常,第二驱动电机103采用步进电机或伺服电机。
19.下面简述一下本道岔3d扫查器的工作原理:将道岔3d扫查器放置到道岔的合适位置,并使主动轮3和编码轮2行走于翼轨上面,辅助轮7行走于道岔的心轨或另一翼轨上面,带磁导向轮5通过磁力吸附并行走于该翼轨的轨头侧面,超声波探头9利用带磁探头环8与心轨之间磁力作用紧贴于心轨侧面,并保持合适的压紧力;带磁导向轮5用于实现道岔3d扫查器整体的横向定位,并通过辅助轮7与编码轮2、主动轮3相配合可使道岔3d扫查器整体保持平衡;通过带磁探头环8与心轨或另一翼轨的相互吸附,使横移座6随之沿各个导向杆11横向滑动实现自动调节,同时由于带磁探头环8可转动安装在升降机构10的动力输出端上且其轴线为上下走向,超声波探头9可转动安装在带磁探头环8中且其轴线为前后走向,这样可使得超声波探头9具有两个转动自由度,进而使得无论岔道汇合、张开、平行的情况下,超声波探头9的探头面都能够与心轨或另一翼轨的侧面自动贴附,可有效避免出现漏判误判。
20.进行扫查时,在设置好初始深度及扫查范围等参数后,先由驱动装置4的第一驱动电机41驱动相应的传动带轮43转动,通过环形同步带42带动另一传动带轮43转动,再通过转轴44带动主动轮3转动,驱动道岔3d扫查器整体向前移动,使主动轮3和编码轮2行走于翼轨上面,辅助轮7行走于道岔的心轨或另一翼轨上面,带磁导向轮5吸附并吸走于该翼轨的轨头侧面,超声波探头9紧贴于心轨或翼轨侧面并向前移动扫查,生成心轨或翼轨第一个深度位置的b型扫查视图(b型扫查视图可采用水平截面切片图像进行显示,图像中纵坐标(y)表示扫描的深度,横坐标(x)表示扫查移动的距离);直至当道岔3d扫查器向前移动至扫查范围的终点时,驱动装置4使主动轮3停止转动,同时升降机构10的第二驱动电机103驱动蜗轮104转动,带动升降直齿条102、带磁探头环8和超声波探头9一起沿竖直导轨101下降一个单位深度的距离,再由驱动装置4驱动主动轮3反向转动,驱动道岔3d扫查器整体向后移动,使超声波探头9紧贴于心轨或翼轨侧面并向后往回扫查,生成心轨或翼轨第二个深度位置的b型扫查视图;如此往复,可使超声波探头9呈弓字形路径对扫查范围内的心轨或翼轨进
行全覆盖扫查,生成心轨或翼轨不同深度位置的多个b型扫查视图;最后,通过对多个b型扫查视图的水平截面切片图像进行叠加计算分析,可得到扫查范围内心轨或翼轨的3d伤损图像。所述道岔自动3d扫查器通过驱动装置4和升降机构10驱动超声波探头9沿自上至下的弓字形路径对扫查范围内的心轨或翼轨进行全覆盖扫查,生成心轨或翼轨不同深度位置的多个b型扫查视图,再通过对各个b型扫查视图的水平截面切片图像进行叠加计算分析,可得到扫查范围内心轨或翼轨的3d伤损图像,便于让探伤人员直观地对道岔对应位置的3d图像进行分析,快速观察图像中各个伤损及其分布情况,可有效避免出现漏判误判。另外,超声波探头9可以采用干耦合的形式实现对心轨或翼轨耦合,结合心轨或翼轨的特征,利用宽声束、高能量的超声波探头9,实现每次扫查的过程,超声波声束均能够较大面积的覆盖心轨或翼轨,防止漏检,提高检测效率。
21.此外,需要说明的是,本说明书中所描述的具体实施例,其各部分名称等可以不同,凡依本发明专利构思所述的构造、特征及原理所做的等效或简单变化,均包括于本发明专利的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1