一种行走式土壤属性高光谱快速检测车及其方法
1.本发明属于土壤高光谱近地传感技术领域,具体涉及一种行走式土壤属性高光谱快速检测车及其方法。
背景技术:
2.在我国农业生产中,目前依然存在过度施用农药化肥等问题,这也带来了大量的资源浪费、土壤板结化、地下水污染等经济生态问题。采用现代科学手段探明土壤理化性质、作物生长状况和肥料需求,精准调控各类生产要素的投入可以获得最大的生产和生态价值。同时土壤具有高度时空异质性,各类营养元素也在不断发生变化。以往对于农田土壤基础理化信息的获取多采用田间定点采样后实验室化学分析的方法。这一方法可以提供耕地土壤大致理化信息,但也具有人力物力消耗大、数据可更新性差、样点代表性存疑和耕地土壤破坏等问题,对于精准农业的进一步发展造成限制(赵春江,薛绪掌,王秀,等.精准农业技术体系的研究进展与展望[j].农业工程学报,2003(04):7-12.)。
[0003]
土壤的光谱曲线中蕴含丰富的属性信息,通过将发射率和土壤属性之间进行线性或非线性建模,已可以较好的预测土壤机械组成、ph、有机质、氮磷钾和水分等属性信息。可见-近红外光谱分析设备用于土壤属性的分析测定可以即时获取土壤属性信息、提高土壤资源调查精度并且极大减少人力物力资源消耗(史舟,徐冬云,滕洪芬,等.土壤星地传感技术现状与发展趋势[j].地理科学进展,2018,37(01):79-92.)。
[0004]
光谱分析基于电磁辐射理论,通过对不同元素原子核外电子在激发态与基态转换时辐射能量变化的探测以获取不同的特征光谱并进行理化性质的鉴别。野外原位土壤可见/近红外光谱的研究分为静态测量和行进式测量两种。静态光谱建模反演土壤属性适用的空间范围较小,制约较大时空尺度推广的可能,随着光谱快速获取及数字土壤制图技术的发展,行进式的土壤光谱快速检测装置成为研究的热点。中国专利cn104483285a公开了一种基于近红外光谱技术的车载式土壤养分监测及自动采样装置,该装置通过单独的车载设备实现田间土壤的即时采集分析(中国科学院合肥物质科学研究院.基于近红外光谱技术的车载土壤养分检测及自动采样装置:cn201410741370.0[p].)。中国专利cn102798601a公开了一种土壤有机质检测装置以及检测方法。该装置主题部分为一台封闭式采样车,车内封装样品采集设备、样品光谱检测设备和光谱信号处理设备;同时该设备利用封装在其中的有机质光谱反演模型实现土壤有机质含量的快速检测(浙江大学.一种土壤有机质检测装置以及检测方法:cn201210286344.4[p].2012-11-28.)。
[0005]
综上所述,目前已有多项基于可见近红外波段的田间土壤属性监测装置,但大部分设备存在取样和测定过程分离、无法配合田间作业过程等问题,依旧存在人力物力的偏多浪费,同时也对数据的时间和空间精度的进一步提升造成限制,而配合田间耕作进行的行走式土壤属性高光谱快速检测车能够极大弥补这些缺陷以实现土壤属性信息的连续、快速、动态反演检测。
技术实现要素:
[0006]
本发明的目的在于克服现有技术中的不足之处,并提供一种行走式土壤属性高光谱快速检测车及其方法。该检测车由拖拽动力装置牵引,能动态获取土壤属性信息,极大提高数据的可更新性及精确度,使得大面积快速获取高精度土壤基本理化性质成为可能。
[0007]
本发明所采用的具体技术方案如下:
[0008]
第一方面,本发明提供了一种行走式土壤属性高光谱快速检测车,包括拖拽式悬挂平台、连接架、高度调节机构和四连杆仿形机构;
[0009]
所述拖拽式悬挂平台水平设置,其一侧顶部垂直固定有用于与外部动力拖拽装置相连的连接架;拖拽式悬挂平台上设有用于调节高度的高度调节机构;远离所述连接架的拖拽式悬挂平台一侧固定有第一竖杆,第一竖杆通过沿轴向设置的第一移动调节杆和第二移动调节杆与位于拖拽式悬挂平台外侧的第二竖杆相连,第一竖杆、第一移动调节、第二移动调节杆和第二竖杆共同构成四连杆仿形机构;第二竖杆底部按照所述动力拖拽装置行进方向依次安装有波纹圆盘刀、开沟轮、光谱探头铧犁和覆土镇压轮,通过四连杆仿形机构能起到调节波纹圆盘刀、开沟轮、光谱探头铧犁和覆土镇压轮的作用高度;
[0010]
所述拖拽式悬挂平台上设有信号分析器、空间位置信号接收天线、空间位置信号处理分析器、控制平台和用于为用电装置供电的电源;所述空间位置信号接收天线与空间位置信号处理分析器相连,空间位置信号处理分析器与控制平台相连,控制平台与信号分析器和光谱探头铧犁相连。
[0011]
作为优选,所述高度调节机构包括连杆、车轮、斜杆和调节拉杆;拖拽式悬挂平台中部贯穿设有连杆,两者之间转动连接;连杆两端均位于拖拽式悬挂平台的外侧,且两端分别通过固定杆与用于支撑的地面上的车轮转动连接;连杆中部与斜杆的一端固定连接,斜杆的另一端与调节拉杆的螺丝一端固定连接,螺丝的另一端与连接架固定连接;通过改变调节拉杆中螺丝的长度,斜杆相对于拖拽式悬挂平台的倾角发生偏转,带动连杆转动,将拖拽式悬挂平台整体作垂直方向的移动,进而改变拖拽式悬挂平台高度。
[0012]
进一步的,所述斜杆和调节拉杆均与连杆垂直,连杆与连接架所在侧平行设置。
[0013]
作为优选,所述连接架的外侧分别设有呈三角形布设的第一悬挂钮、第二悬挂钮和第三悬挂钮,连接架通过第一悬挂钮、第二悬挂钮和第三悬挂钮与动力拖拽装置相连。
[0014]
作为优选,所述第一移动调节杆和第二移动调节杆的一端分别与第一竖杆转动连接,另一端分别与第二竖杆转动连接。
[0015]
作为优选,所述信号分析器上装载有土壤属性光谱估算模型,用于实时估算获取土壤属性信息。
[0016]
作为优选,所述四连杆仿形机构所在面与拖拽式悬挂平台所在面垂直。
[0017]
作为优选,所述电源为直流电源,通过输电线分别信号分析器、空间位置信号接收天线、空间位置信号处理分析器、控制平台和光谱探头铧犁相连接。
[0018]
作为优选,所述波纹圆盘刀、开沟轮、光谱探头铧犁、覆土镇压轮和车轮的作用方向均与动力拖拽装置行进方向相同。
[0019]
第二方面,本发明提供了一种根据第一方面任一所述行走式土壤属性高光谱快速检测车的土壤属性高光谱快速检测方法,具体如下:
[0020]
通过连接架将检测车与外部动力拖拽装置相连,启动电源,通过空间位置信号接
收天线及空间位置信号处理分析器收集设备的地理空间位置信息,通过控制平台设置测量模式和测量参数,对光谱探头铧犁进行暗电流校正、系统优化及白板校正,随后通过调节高度调节机构和四连杆仿形机构使光谱探头铧犁的头部进入土壤设定深度;
[0021]
启动动力拖拽装置,检测车随动力拖拽装置在田间运行,波纹圆盘刀切开田中秸秆及石子,开沟轮挖松土壤以方便光谱探头铧犁进入土壤,覆土镇压轮将开沟轮及光谱探头铧犁挖出的土壤填回原状;同时,检测车根据预先设定的采样模式及时间,实时记录采样点的空间位置信息、光谱信息及土壤属性信息。
[0022]
本发明相对于现有技术而言,具有以下有益效果:
[0023]
本发明的检测车自带探测光源探头,受天气影响小,数据获取快;整套设备可以根据不同拖拽动力装置、田块类型灵活改变组装模式;设备测量土壤光谱后可以自动完成土壤的回填工作。
附图说明
[0024]
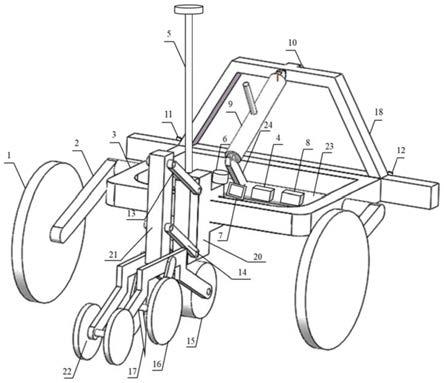
图1为本发明检测车的结构示意图;
[0025]
图2为本发明检测车的侧视图;
[0026]
图中:1、车轮,2、固定杆,3、拖拽式悬挂平台,4、信号分析器,5、空间位置信号接收天线,6、空间位置信号处理分析器,7、控制平台,8、电源,9、调节拉杆,10、第一悬挂钮,11、第二悬挂钮,12、第三悬挂钮,13、第一移动调节杆,14、第二移动调节杆,15、波纹圆盘刀,16、开沟轮,17、光谱探头铧犁,18、连接架,20、第一竖杆,21、第二竖杆,22、覆土镇压轮,23、连杆,24、斜杆。
具体实施方式
[0027]
下面结合附图和具体实施方式对本发明做进一步阐述和说明。本发明中各个实施方式的技术特征在没有相互冲突的前提下,均可进行相应组合。
[0028]
如图1和2所示,为本发明提供的一种行走式土壤属性高光谱快速检测车,该检测车主要包括拖拽式悬挂平台3、连接架18、高度调节机构和四连杆仿形机构。
[0029]
拖拽式悬挂平台3水平设置,其一侧的顶部垂直固定有呈竖直状态的连接架18,连接架18用于与外部动力拖拽装置相连。为了实现连接架18与动力拖拽装置的连接,可以在连接架18的外侧分别设有呈三角形布设的第一悬挂钮10、第二悬挂钮11和第三悬挂钮12,连接架18通过第一悬挂钮10、第二悬挂钮11和第三悬挂钮12与动力拖拽装置相连。
[0030]
拖拽式悬挂平台3上设有用于调节高度的高度调节机构。高度调节机构可以采用市面上现有的装置,也可以采用如下结构:高度调节机构主要包括连杆23、车轮1、斜杆24和调节拉杆9;拖拽式悬挂平台3中部贯穿设有连杆23,两者之间转动连接;连杆23两端均位于拖拽式悬挂平台3的外侧,且两端分别通过固定杆2与车轮1中心转动连接,车轮1用于将该拖拽式悬挂平台3支撑在地面上;连杆23中部与斜杆24的一端固定连接,斜杆24的另一端与调节拉杆9的螺丝一端固定连接,螺丝的另一端与连接架18固定连接;调节拉杆9的中部设有能调节内部螺丝长度的旋钮;由于螺丝的一端与连接架18固定连接,因此通过改变调节拉杆9中螺丝的长度,会使斜杆24在力的作用下相对于拖拽式悬挂平台3的倾角发生偏转,同时带动连杆23和固定杆2以车轮1为支点转动,将拖拽式悬挂平台3整体作垂直方向的移
动,进而改变拖拽式悬挂平台的高度。为了使该高度调节机构实现更好的高度调节效果,可以将斜杆24和调节拉杆9均与连杆23垂直,连杆23与连接架18所在侧平行设置。
[0031]
在远离连接架18的拖拽式悬挂平台3一侧固定有第一竖杆20,第一竖杆20沿轴向转动依次连接有第一移动调节杆13和第二移动调节杆14。第一移动调节杆13和第二移动调节杆14的一端分别与第一竖杆20朝向外侧的一面转动连接,另一端分别与第二竖杆21连接。第二竖杆21位于拖拽式悬挂平台3的外侧,第一移动调节杆13和第二移动调节杆14与第二竖杆21同样沿轴向依次转动连接。第一竖杆20、第一移动调节13、第二移动调节杆14和第二竖杆21共同构成四连杆仿形机构。第二竖杆21底部按照动力拖拽装置行进方向依次安装有波纹圆盘刀15、开沟轮16、光谱探头铧犁17和覆土镇压轮22,通过四连杆仿形机构能调节波纹圆盘刀15、开沟轮16、光谱探头铧犁17和覆土镇压轮22的作用高度。其中,波纹圆盘刀15、开沟轮16、光谱探头铧犁17、覆土镇压轮22和车轮1的作用方向均与动力拖拽装置行进方向相同,光谱探头铧犁17的底部应当低于波纹圆盘刀15、开沟轮16、覆土镇压轮22和车轮1的底部,以便在实际应用时,波纹圆盘刀15、开沟轮16、覆土镇压轮22和车轮1的底部能够与土壤表面相接触,光谱探头铧犁17的底部能伸入土壤内部。此外,在实际应用时,四连杆仿形机构所在面可以与拖拽式悬挂平台3所在面垂直设置。
[0032]
拖拽式悬挂平台3上设有信号分析器4、空间位置信号接收天线5、空间位置信号处理分析器6、控制平台7和用于为用电装置供电的电源8。空间位置信号接收天线5通过数据线与空间位置信号处理分析器6连接,空间位置信号处理分析器6通过数据线与控制平台7连接,控制平台7通过数据线与信号分析器4连接,信号分析器4通过光纤和光谱探头铧犁17连接。信号分析器4、空间位置信号接收天线5、空间位置信号处理分析器6和控制平台7共同用于获取目标采样点的空间位置信息、光谱信息及土壤属性信息。
[0033]
在实际应用时,信号分析器4上可以嵌入土壤属性光谱估算模型,用于实时估算获取土壤属性信息。土壤属性光谱估算模型即土壤光谱反射率与土壤属性之间的反演估算模型,输入的自变量为土壤光谱反射率,输出的因变量为某种土壤属性,这种模型可以是线性或者非线性的,预先用实测数据拟合得到。其中,土壤属性可以是物理属性或者化学属性,例如含氮量、重金属含量、有机质含量、含水率,而不同的属性用到的光谱波段可能又是不一样的。实际使用时,应该需要针对某一目标土壤属性,从土壤光谱波段中筛选出一个或多个敏感波段,然后用实测数据拟合筛选出的敏感波段和目标土壤属性之间的线性或者非线性模型,用于后续预测。具体的模型形式以及敏感波段,需要根据实测数据的拟合效果和预测模型准确性进行选择。
[0034]
在实际应用时,电源8可以采用直流电源,通过输电线分别信号分析器4、空间位置信号接收天线5、空间位置信号处理分析器6、控制平台7和光谱探头铧犁17相连接。本发明的空间定位系统操作部件、控制平台、直流电源及光谱光源等都采用现阶段已商业化的型号,根据用户需求,可以自行选购。
[0035]
光谱探头铧犁17可以采用市面上的现有设备,其核心硬件为光谱探头和铧犁。其中,光谱探头内置于铧犁顶部,采用卤素光源和蓝宝石玻璃,外部留有电源接口与电源供应系统连接、光纤接口与信号分析系统连接。铧犁在设备启动后深入土壤内部,将光谱探头带入土壤,探头发射可见近红外波段光源并接收土壤反射率,实现土壤光谱信息的即时获取。
[0036]
信号分析器4作为整个设备的核心部分,接收探头的探测数据,并通过嵌入的模型
即时分析生成土壤属性信息,传入设备控制系统进行存储展示。
[0037]
利用上述行走式土壤属性高光谱快速检测车的土壤属性高光谱快速检测方法,具体如下:
[0038]
通过连接架18将检测车与外部动力拖拽装置相连,启动电源8,通过空间位置信号接收天线5及空间位置信号处理分析器6收集设备的地理空间位置信息,空间定位精度应当达到米级,以符合田块尺度的精度要求。通过控制平台7设置测量模式和测量参数,对光谱探头铧犁17进行暗电流校正、系统优化及白板校正,随后通过调节高度调节机构和四连杆仿形机构使光谱探头铧犁17的头部进入土壤设定深度(一般为5-10cm)。
[0039]
启动动力拖拽装置,检测车随动力拖拽装置在田间运行,波纹圆盘刀15切开田中秸秆及石子等硬物,开沟轮16挖松土壤以方便光谱探头铧犁17进入土壤,覆土镇压轮22将开沟轮16及光谱探头铧犁17挖出的土壤填回原状。同时,检测车根据预先设定的采样模式及时间,实时记录采样点的空间位置信息、光谱信息及土壤属性信息,测量结果即时展示在设备控制系统的平板电脑界面并存储在内存中。
[0040]
具体的,设备运行前,操作人员首先在设备控制系统中进行测量参数的预先设置,并对空间定位系统的信号接收器和光谱探头进行校正。设备启动后,铧犁深入土壤5-10cm,拖拽动力装置的运行过程中,光谱探头按照预先设定的采样时间间隔向信号分析系统传输土壤高光谱信息,光谱信息经模型分析后得出土壤理化性质结果显示并储存在平板电脑上。
[0041]
以上所述的实施例只是本发明的一种较佳的方案,然其并非用以限制本发明。有关技术领域的普通技术人员,在不脱离本发明的精神和范围的情况下,还可以做出各种变化和变型。因此凡采取等同替换或等效变换的方式所获得的技术方案,均落在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1