潜水电机止推轴承故障检测方法
1.本发明涉及一种电机故障检测方法,特别是一种潜水电机止推轴承故障检测方法。
背景技术:
2.潜水电机在水资源配置、抢险救灾等领域发挥着重要作用,而止推轴承故障是引起潜水电机故障的主要因素之一,严重影响了潜水电机的安全可靠运行。止推轴承位于潜水电机尾部,其内部有一层水膜,负责承受电机运行时的产生的轴向力。由于止推轴承内部的水膜非常薄,一旦电机内部循环水中混入异物,就会极大地影响水膜的稳定性,使得止推轴承内部发生干摩擦,破坏轴承的止推滑块和圆盘。因此,研究止推轴承故障机理和诊断方法具有实际意义。
3.止推轴承故障机理尚不明确,但是通过样机试验去获取实际数据不仅消耗人力物力,一些电机参数也不易获取。轴承故障诊断领域的研究成果繁多,为了验证方法的有效性同样需要数据支撑。综上而言,设计一个止推轴承故障检测方法十分有必要。
技术实现要素:
4.本发明在于提供潜水电机止推轴承故障检测方法,该仿真模型以模拟止推轴承故障时潜水电机内部的电磁性能变化特点作为检测依据为目标。达到为潜水电机止推轴承故障提供检测方法的目的。
5.在实际中当止推轴承发生故障时,轴承滑块的表面可以观察到呈多个同心圆分布的划痕,而产生这些划痕必然会引起电机负载的变化,为模型设计方法提供了依据。本发明的解决方案是:
6.一种潜水电机止推轴承故障检测方法,包括以下步骤:
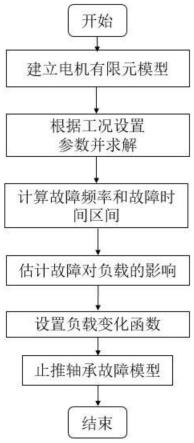
7.s10:利用有限元软件建立正常潜水电机二维模型;
8.s20:在瞬态场中根据工况设置参数并求解;
9.s30:根据s20中的电机转速和止推轴承的机械结构计算故障频率和故障时间区间;
10.s40:结合s30中的计算结果设定轴承故障时对电机负载的变化影响,得到止推轴承故障有限元模型。
11.具体的,步骤s20中,仿真时间要确保电机达到稳态。
12.具体的,步骤s20中,电机的机械设置为耦合负载。
13.在实际操作中具体的,步骤s20中,耦合负载的负载大小依据工况设置。
14.作为本发明具体的方案,步骤s30中,电机转速为s20中耦合负载所对应的转速。
15.作为本发明具体的方案,步骤s30中,故障时间区间包括冲击时间和摩擦时间。
16.作为本发明具体的方案,步骤s30中,止推轴承故障频率和故障时间区间按以下步骤计算:
17.s31:计算止推轴承故障频率:
18.电机轴转速为n,单位为rad/min,当止推轴承内部出现故障,电机轴每转一圈出现的故障点数应与轴承滑块数一致,则有:
19.nf=nc20.故障时间点则为:
[0021][0022]
那么止推轴承的故障频率为:
[0023][0024]
其中,fb为止推轴承故障特征频率,n为电机转子机械转速,nc为止推轴承滑块数;
[0025]
s32:计算止推轴承故障时间节点:
[0026][0027]
其中,tb为止推轴承故障特征频率,fb为止推轴承故障特征频率,ts为电机模型仿真稳定时间。
[0028]
s33:根据时间节点选择止推轴承故障时间的冲击时间和摩擦时间,根据模拟的故障情况选择该时间节点的q个步长为冲击时间,两个连续的冲击时间之间为摩擦时间。
[0029]
作为本发明具体的方案,步骤s40中,止推轴承故障对电机耦合负载的冲击和摩擦大小随着故障严重程度变化。
[0030]
作为本发明具体的方案,步骤40中,潜水电机止推轴承故障模型按以下步骤设计:
[0031]
s41:根据故障时间区间和轴承故障引起的冲击和摩擦设置止推轴承故障负载变化函数;
[0032]
s42:在正常电机模型的耦合负载中加入止推轴承故障负载变化函数,得到潜水电机止推轴承故障模型。
[0033]
作为本发明具体的方案,步骤50中,解析结果包括定子电流幅值变化和频谱图变化。
[0034]
本发明所提出的一种潜水电机止推轴承故障检测方法,相对于现有技术,具有如下有益效果:
[0035]
模型中可以模拟止推轴承故障时潜水电机电磁性能的变化;
[0036]
可以根据止推轴承故障严重程度设置对应的数学模型;
[0037]
可以验证止推轴承故障诊断方法和容错技术的有效性。
附图说明
[0038]
图1为本发明的潜水电机止推轴承故障有限元模型设计流程示意图;
[0039]
图2为实施例中的轴承故障负载变化函数;
[0040]
图3为实施例中止推轴承故障仿真模型的定子电流波形图;
[0041]
图4为实施例中止推轴承故障仿真模型的定子电流频谱图;
具体实施方式
[0042]
下面结合具体实施方式对本发明进行阐述,然而本发明的保护范围并非紧紧局限于以下实施例,实施例的说明只是用于帮助理解本发明的方法及其核心思想。凡在本专利的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明要求的保护范围之内。
[0043]
如图1所示,一种潜水电机止推轴承故障检测方法,包括以下步骤:
[0044]
s10:利用有限元软件建立正常电机二维模型,止推轴承滑块数为20,电机参数如下所示。
[0045]
本实施例采用一例潜水电机,电机基本参数如下表所示:
[0046]
电机参数数值功率75kw极对数2额定电压380v铁心长230mm定子外径400mm定子内径225mm转子内径85mm槽配合36—42气隙1.2mm
[0047]
s20:对正常电机模型在瞬态场中根据工况设置参数并求解,求解时间为0.5s,电机的机械设置为耦合负载,大小为200nm,此时电机转速为1490rpm;
[0048]
s30:根据s20中的电机转速和止推轴承的机械结构计算故障频率和故障时间区间,按以下步骤计算:
[0049]
s31:本实施例中模拟止推轴承单点故障情况,其故障频率为:
[0050][0051]
其中,fb=496.7hz为止推轴承故障特征频率,n=1490rpm为电机转子机械转速,nc=20 为止推轴承滑块数;
[0052]
s32:计算止推轴承故障时间节点:
[0053][0054]
其中,tb为止推轴承故障特征频率,fb为止推轴承故障特征频率,ts为电机模型仿真稳定时间。
[0055]
电机模型仿真稳定时间为0.4s,fb=496.7hz,则:
[0056][0057]
s33:根据时间节点选择故障时间区间,选择该时间节点的2个步长为故障时间。本实施例中步长为0.0002s。设置ts后0.2s的故障模拟时间,故轴承故障冲击时间为 0.4+n/496.7
±
0.0002,其中n取1到100,0.4至0.6s之间的其余时间为摩擦时间,仿真时间为0.8s。
[0058]
s40:止推轴承故障对电机耦合负载的冲击和摩擦大小随着故障严重程度变化。本实施例中冲击大小为200nm,摩擦大小为50nm。潜水电机止推轴承故障模型按以下步骤设计:
[0059]
s41:根据故障时间区间和轴承故障引起的冲击和摩擦设置止推轴承故障负载变化函数,负载变化函数如图2所示;
[0060]
s42:在正常电机模型的耦合负载中加入止推轴承故障负载变化函数,得到潜水电机止推轴承故障模型;
[0061]
s50:解析模型分析电磁变化:图3中为止推轴承故障仿真模型的定子电流波形图,其中0.4之前为正常定子电流波形,在0.4s之后加入轴承故障负载变化函数,持续时间为0.2s,可以观察到定子电流幅值变大,同时波形发生轻微畸变。通过对故障定子电流进行傅里叶分解,图4为止推轴承故障仿真模型的定子电流频谱图,其中50hz为基波分量,同时可以观察到 495hz的电流分量,这就是由故障频率为496.7hz的止推轴承故障引起的定子电流谐波分量,它们之间的误差是因为采集点数不足而引起的误差。上述结果验证了本发明模型的有效性。
[0062]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1