一种异源目标航迹数据实时高效融合方法与流程
1.本发明属于数据处理技术领域,具体涉及一种异源目标航迹数据实时高效融合方法。
背景技术:
2.在重点区域防控系统中,一般会针对整个区域划分安保级别和核心区域。并针对不同级别的布防区域配备对应的入侵目标探测跟踪设备以及目标处置设备。通常,为了保证防控系统的可靠性,避免监控死角,会部署众多的目标探测和跟踪设备,常见的如光电设备和雷达设备。这些设备独立或者协同进行目标探测和跟踪,并实时上报所发现的目标的航迹数据。在这种背景下,上层的信息处理系统需要处理的一个关键问题就是目标航迹数据的融合问题,具体来说就是,对于同一个入侵防区的目标,多个不同类型各自独自观测跟踪的设备会持续上报此目标的实时位置信息,并且在此过程中,不同设备对目标的编批不统一,导致信息处理系统收到的此目标的航迹数据有多条。如果不加处理,系统对当前防区威胁目标的数量和整个防区的威胁评估存在较大误差。从而影响防控系统的可靠性,最终影响整个防区的安全。此外,单一的设备对目标的观测存在误差,如果使用单一设备的观测数据,也将会导致目标的位置与其真实的空间位置之间的误差较大。
3.对于航迹融合问题,现有技术中存在如下方案:
4.申请号为201910987019.2的中国专利公布了一种雷达光电信息融合技术,提出一种像素坐标与地理坐标匹配来对雷达和光电信息进行融合的方案。该方案首先使用深度学习方法识别光电设备视野中目标在视野中的位置,然后与雷达探测的所有目标位置进行转换及比对后进行协同跟踪控制。但采用与图像处理、人工智能推理系统结合的融合方法,存在运算复杂、硬件要求较高的问题,系统搭建需要较高的硬件配置;同时,目标航迹数据与ai算法从音视频数据中识别出的目标的匹配也存在较大的不确定性和低可靠性。
5.现有技术中还提出基于目标航迹时空对准的融合方法,其做法是对获取到大量目标航迹数据进行按目标批号分组,对数据上报频率较高的设备上报的目标数据进行位置点推算,使最终的点迹数据在时间点上对齐到目标数据较少的设备上报的时间点上。然后对时间点对齐的多设备上报数据进行融合计算。但基于时空对准的航迹匹配方法对目标航迹数据的数据量依赖较大,这种方案中,如果时空对准建模的设备上报的航迹数据分布不均匀或者较少,将严重影响融合结果的准确性和可靠性。
6.此外,还提出基于设备联动的目标航迹融合方法,其实现方案为对存在联动跟踪关系的雷达设备与光电设备上报的数据进行融合计算。这种场景下,首先是雷达发现可疑目标,然后下发目标信息到光电设备参与联动跟踪。但基于设备联动的航迹融合存在业务局限性,通用性不强,其只能在规定的存在联动关系的设备上报的数据上才能进行融合计算;对多雷达观测同一目标进行融合的方法同样存在业务局限性,其需要的前提是已知多雷达观测同一目标,其目标航迹的同一性已知。对于复杂环境中多设备实时观测上报大量数据的场景无法适用。
技术实现要素:
7.本发明的目的在于针对上述问题,提出一种异源目标航迹数据实时高效融合方法,该方法有助于保证数据的实时性和高可用性,提高运算速度和精度,且能够更好的适应目标航迹数据的数量不确定性和时间分配不均匀性,准确识别出防区内目标的真实数量和还原目标真实运动轨迹,提高目标威胁等级评估的准确性,便于维护,通用性好。
8.为实现上述目的,本发明所采取的技术方案为:
9.本发明提出的一种异源目标航迹数据实时高效融合方法,包括如下步骤:
10.s1、获取所有探测设备的目标航迹数据并放入第一消息队列,目标航迹数据包括探测设备编号、原始目标批号、目标位置和时间戳;
11.s2、订阅第一消息队列中的目标航迹数据,根据探测设备编号和原始目标批号计算md5值作为对应的目标航迹数据的目的编号;
12.s3、基于预设时间窗口对目标航迹数据进行批处理,每批目标航迹数据处理过程如下:
13.s31、根据目的编号进行分组,每组目标航迹数据形成一个目标列表;
14.s32、对各目标列表对应的目标进行历史目标航迹数据匹配,执行如下操作:
15.s321、获取缓存的所有历史目的编号,并放入第一数据集;
16.s322、判断缓存中是否存在当前时间窗口对应目标的目的编号,若是,认为存在历史航迹,从第一数据集中移除对应目标的目的编号,并将当前时间窗口对应目标的目标航迹数据进行缓存,同时将对应目标的历史目标航迹数据插入至当前时间窗口该目标对应的目标列表中形成新目标列表,否则,认为不存在历史航迹,将当前时间窗口对应目标的目的编号和目标航迹数据分别对应放入第二数据集和缓存中;
17.s323、在缓存中对当前时间窗口存在的目标进行融合批号检索,若目标已获得过融合批号,则将该融合批号作为对应目标的最新融合批号,并放入第三数据集中;
18.s33、对第一数据集中余留目的编号对应的目标进行航迹丢失目标识别,执行如下操作:
19.s331、遍历第一数据集,判断余留的各目标是否存在航迹模型,若是,加载对应的航迹模型,否则,基于对应目标的历史目标航迹数据创建并训练航迹模型,将训练好的航迹模型存入模型集合和缓存中;
20.s332、遍历第二数据集,获取各目标所在新目标列表的目标航迹数据;
21.s333、采用加载的航迹模型或训练好的航迹模型预测出与对应目标的目标航迹数据时间点对齐的目标位置,并计算点迹平均误差ε:
[0022][0023]
其中,n为目标所在新目标列表的数据量,为目标在时间点i时的预测经度,为目标在时间点i时的实际经度,为目标在时间点i时的预测纬度,为目标在时间点i时的实际纬度,为目标在时间点i时的预测高度,为目标在时间点i时的实际高度;
[0024]
s334、判断点迹平均误差ε是否小于目标阈值,若是,认为当前时间窗口的对应目标为航迹丢失的历史目标,将对应的当前时间窗口的目标和历史目标进行批号融合处理,否则,认为当前时间窗口的对应目标为新出现的目标;
[0025]
s34、判定任意两个目标的同一性并进行融合匹配,具体如下:
[0026]
s341、将其中一个目标记为模型基准目标,另一个目标记为对齐目标,并为模型基准目标选择模型算法;
[0027]
s342、基于所选模型算法建立模型基准目标的预测模型,并采用模型基准目标所在新目标列表的目标航迹数据训练获得最终预测模型;
[0028]
s343、基于内插法或外推法在最终预测模型上预测与对齐目标的目标航迹数据时间点对齐的目标位置;
[0029]
s344、判断预测的目标位置与对齐目标的目标位置之间的平均距离误差是否小于预设距离阈值,若是,目标满足同一性,判定为同一个目标,检索目标是否已分配有融合批号,若任一目标具备融合批号,则应用融合批号传递逻辑共用该融合批号,若两个目标均未分配过融合批号,则以较早出现的目标的目的编号作为共用的融合批号,并将分配到的融合批号保存到第三数据集和缓存中;否则,目标不满足同一性,向缓存中添加两个目标的不融合标识;
[0030]
s35、将同一目标当前时间窗口下的目标航迹数据归为一组,基于卡尔曼滤波平滑处理对本次分组后的各目标对应的目标航迹数据进行误差矫正;
[0031]
s36、根据误差矫正后的目标航迹数据评估对应目标的威胁等级,并将威胁等级评分输出至第二消息队列以供订阅。
[0032]
优选地,步骤s2中,订阅第一消息队列中的目标航迹数据基于flink计算框架实现。
[0033]
优选地,步骤s31中,还对各目标列表进行异常挑点校验处理,删除异常的目标航迹数据,具体如下:
[0034]
s311、判断目标航迹数据的目标位置是否超过预设范围,若是,删除该目标航迹数据,否则,执行步骤s312;
[0035]
s312、获取经过时统的系统当前时间并读取目标航迹数据的时间戳,判断目标航迹数据的时间和系统当前时间之差是否超过预设时间延迟阈值或目标航迹数据的时间是否超过目标列表中目标航迹数据的平均时间,若是,删除该目标航迹数据,否则,执行步骤s313;
[0036]
s313、计算目标列表中目标航迹数据的平均速度,并根据相邻两点之间的位置差和时间差计算各目标航迹数据的瞬时速度,判断瞬时速度是否高于平均速度,若是,删除该目标航迹数据,否则,进行保留。
[0037]
优选地,步骤s322中,对新目标列表还执行如下操作:
[0038]
当新目标列表中的数据量大于预设保留值时,删除在先的历史目标航迹数据直至数据量达到预设保留值的二分之一。
[0039]
优选地,步骤s331中,基于对应目标的历史目标航迹数据创建并训练航迹模型,具体如下:
[0040]
s3311、分别基于最小二乘法建立目标的经度、纬度和高度三个维度的模型,公式
如下:
[0041][0042]
其中,t为时间,f(t)为目标函数,a
x
为多项式第x次项的常数项系数,m为最大阶数;
[0043]
s3312、判断是否满足pointnum>max-degree+1,其中,pointnum为目标所在新目标列表的数据量,max-degree为预设最大阶数,若是,则最大阶数m=max-degree,否则,最大阶数m=pointnum-1;
[0044]
s3313、根据对应的历史目标航迹数据基于fit方法训练目标三个维度的模型,将训练好的三个模型视为航迹模型。
[0045]
优选地,步骤s334中,批号融合处理,具体如下:
[0046]
从第三数据集和缓存中检索判断对应的历史目标是否分配过融合批号,若是,将对应目标的原始目标批号和历史目标分配过的融合批号之间的映射信息存入第三数据集和缓存中,否则,重新分配融合批号。
[0047]
优选地,步骤s34中,判定任意两个目标的同一性并进行融合匹配,还执行如下操作:
[0048]
sa1、判断两个目标是否来自同一探测设备,若是,认为目标不满足同一性,否则,执行步骤sa2;
[0049]
sa2、判断两个目标是否分别分配过融合批号,若是,认为目标不满足同一性,否则,执行步骤sa3;
[0050]
sa3、判断两个目标是否存在不融合标识,若是,认为目标不满足同一性,否则,执行步骤s341。
[0051]
优选地,步骤s341中,将其中一个目标记为模型基准目标,另一个目标记为对齐目标,并为模型基准目标选择模型算法,具体如下:
[0052]
当两个目标所在新目标列表中的数据量均等于2时,模型算法选择线性函数模型,以时间跨度大的目标作为模型基准目标;
[0053]
当两个目标所在新目标列表中的数据量分别等于2和3时,模型算法选择抛物线函数模型,以数据量多的目标作为模型基准目标;
[0054]
当两个目标所在新目标列表中的数据量均等于3时,模型算法选择抛物线函数模型,选取任一目标作为模型基准目标;
[0055]
当两个目标所在新目标列表中的数据量均大于3时,获取两个目标互落于对方时间范围内的数据量,若落于对方时间范围内的数据量大于第一预设阈值且对方的数据量大于第二预设阈值,则模型算法选择三次样条插值模型,以对方作为模型基准目标,否则,模型算法选择最小二乘法模型,以数据量多的目标作为模型基准目标。
[0056]
优选地,步骤s36中,威胁等级评分final-threat-score,计算如下:
[0057][0058][0059]
其中,fy(facy)为威胁因素facy的威胁评估分数,αy为目标威胁权重系数,n为威胁因素的总数。
[0060]
优选地,威胁因素facy包括目标距离防区中心点的位置、目标实时速度、目标类型、目标的工作状态、目标的航向角、防区中心点的安全级别。
[0061]
与现有技术相比,本发明的有益效果为:
[0062]
1)对探测设备上报目标的目标批号的统一编批和融合批号分配相对于强依赖设备标识信息的方法具有更好的可理解性和系统维护性;
[0063]
2)基于动态时间窗口对上报的目标航迹数据进行预分组,在一个处理时间窗口内能够获取同目标更多的目标航迹数据,有助于提升融合计算结果的准确性,同时使用了基于历史目标航迹数据关联的方式,能很好的解决当前时间窗口内目标数据量不足造成的实时结果精确度波动的问题,并可避免目标航迹逐个计算带来的偶然误差和降低信息处理系统性能开销,保证数据的实时性和高可用性;
[0064]
3)通过高速缓存保存以及检索目标航迹的历史目标轨迹数据,动态分配历史目标航迹数据参与航迹融合计算,一方面补充当前时间窗口中的数据量,另一方面,针对历史数据较多的情况,基于数量和时间对历史数据进行剔除和丢弃,避免久远的历史航迹数据对结果造成过拟合的影响,支持航迹丢失目标的识别和关联,能够在软件层面很好的弥补硬件部署和设备工作异常状态下的目标统计和分析能力;
[0065]
4)通过可动态增加和扩展的异常挑点校验处理排除异常数据点,降低干扰,有助于提高运算速度和精度;
[0066]
5)相对于现有技术中基于设备联动的融合方法和单一种类设备数据融合方法,该方法具有更强的通用性,不受制于设备类型和设备数量,只要是能够稳定上报目标航迹数据的设备,都能统一处理,且对设备上报数据的频率无任何特别要求;
[0067]
6)相对于传统融合方法中的目标航迹同一性识别,该方法通过数据缓存匹配,提出目标融合批号传递概念,大大降低同一性计算量,提升了系统数据处理能力;
[0068]
7)相对于现有技术中基于目标航迹时空对准的融合方法,该方法还可实现基于非时空对准数据的同一目标航迹识别,在此阶段对原始的所有目标数据不做挑选舍弃,且在同一融合时使用各自的真实上报数据,能够更充分的应用各探测设备的原始目标航迹数据,提高轨迹的真实性;
[0069]
8)完善的融合数据检索体系,在航迹丢失目标识别和融合匹配过程中,无需频繁重复计算数据匹配挑选,减少不必要的复杂核心计算逻辑;
[0070]
9)目标同一性判定过程中的航迹模型动态分配逻辑,同时还有动态的模型基准目标选择策略,相较于单一的匹配逻辑,能够更好的适应目标航迹数据的数量不确定性和时间分配不均匀性,提升准确性,使同一判定结果更加可靠;
[0071]
10)基于卡尔曼滤波平滑处理方法对同一性判定后的全量目标航迹做轨迹平滑处理和位置误差矫正,将具有同一性的目标进行融合匹配,实现同目标多航迹关联识别计算,可准确识别出防区内目标的真实数量和还原目标真实运动轨迹,有利于在实现全方位动态可扩展的目标威胁等级评估时提高评估准确性。
附图说明
[0072]
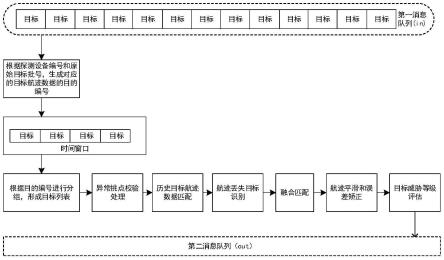
图1为本发明异源目标航迹数据实时高效融合方法流程图;
[0073]
图2为本发明的异常挑点校验处理流程图;
[0074]
图3为本发明的历史目标航迹数据匹配流程图;
[0075]
图4为本发明的航迹丢失目标识别流程图;
[0076]
图5为本发明的目标同一性判定和融合匹配流程图;
[0077]
图6为本发明的威胁等级评估示意图;
[0078]
图7为本发明的威胁因素评估配置界面图;
[0079]
图8为本发明的因素权重配置界面图。
具体实施方式
[0080]
下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
[0081]
需要说明的是,除非另有定义,本文所使用的所有的技术和科学术语与属于本技术的技术领域的技术人员通常理解的含义相同。本文中在本技术的说明书中所使用的术语只是为了描述具体的实施例的目的,不是在于限制本技术。
[0082]
本技术中对应术语释义如下:
[0083]
航迹:目标运动的轨迹。由一个个带时间戳和目标批号的目标航迹数据形成。
[0084]
时间窗口:每次数据批量处理运算的时间间隔。
[0085]
目标编批:探测设备对自身发现的目标进行的批号编排。保证在探测设备自身上目标的唯一标识。
[0086]
如图1-8所示,一种异源目标航迹数据实时高效融合方法,包括如下步骤:
[0087]
s1、获取所有探测设备的目标航迹数据并放入第一消息队列,目标航迹数据包括探测设备编号、原始目标批号、目标位置和时间戳。
[0088]
其中,防区内的所有探测设备(如光电设备、雷达设备等)上报的目标航迹数据进入到第一消息队列(in),通过从第一消息队列(in)实时订阅消费目标航迹数据进行大量异源目标航迹数据实时高效融合处理,处理完的数据将发布到第二消息队列(out)以供下游系统(如指控和显控系统等)订阅消费。目标航迹数据所携带的原始目标批号即为探测设备对自身发现的目标进行编排的批号,保证在探测设备自身上目标的唯一标识。目标航迹数
据所携带的目标位置如包括目标的经度、纬度、高度、速度,航向角、类型等,可根据实际需求确定。
[0089]
s2、订阅第一消息队列中的目标航迹数据,根据探测设备编号和原始目标批号计算md5值作为对应的目标航迹数据的目的编号。
[0090]
在一实施例中,步骤s2中,订阅第一消息队列中的目标航迹数据基于flink计算框架实现。
[0091]
其中,因为不同探测设备对不同目标的目标编批可能会重复,因此,探测设备上报的目标航迹数据中的原始目标批号不具备唯一标识性。通过考虑将探测设备编号(deviceid)与原始目标批号(oldtargetno)组合生成系统内唯一标识目标的目标批号。为避免生成出的目标批号在形式上体现出与特定设备编号的强语义化,本技术根据探测设备编号(deviceid)和原始目标批号(oldtargetno)计算md5值作为对应的目标航迹数据的目标唯一批号,即目的编号targetno=md5(deviceid_targetno)作为目标唯一批号,如取前八位数字作为目的编号,或根据实际需求调整。
[0092]
s3、基于预设时间窗口对目标航迹数据进行批处理,每批目标航迹数据处理过程如下:
[0093]
s31、根据目的编号进行分组,每组目标航迹数据形成一个目标列表。
[0094]
在一实施例中,步骤s31中,还对各目标列表进行异常挑点校验处理,删除异常的目标航迹数据,具体如下:
[0095]
s311、判断目标航迹数据的目标位置是否超过预设范围,若是,删除该目标航迹数据,否则,执行步骤s312;
[0096]
s312、获取经过时统的系统当前时间并读取目标航迹数据的时间戳,判断目标航迹数据的时间和系统当前时间之差是否超过预设时间延迟阈值或目标航迹数据的时间是否超过目标列表中目标航迹数据的平均时间,若是,删除该目标航迹数据,否则,执行步骤s313;
[0097]
s313、计算目标列表中目标航迹数据的平均速度,并根据相邻两点之间的位置差和时间差计算各目标航迹数据的瞬时速度,判断瞬时速度是否高于平均速度,若是,删除该目标航迹数据,否则,进行保留。
[0098]
其中,使用时间窗口对目标航迹进行统一批处理,采用动态时间窗口机制处理数据,默认时间窗口大小为500ms,即500ms处理一批目标航迹数据,还可根据实际需求选择实现时间窗口的动态调整。一般来说,探测设备上报目标航迹数据的频率在20hz-50hz,即50ms/次-20ms/次。而下游指控和显控系统的数据刷新频率容许范围一般在1hz数量级都是合理的。
[0099]
在一个时间窗口内,将目标航迹数据按照目的编号targetno进行分组,每个目的编号对应多个目标航迹数据构成目标列表targetlist,时间窗口内所有目标列表targetlist构成目标地图targetmap。
[0100]
对目标地图targetmap(即包括所有目标列表targetlist)里的目标航迹数据做异常挑点校验处理。具体如下:
[0101]
1)目标位置(经纬高)校验:当前防区所在点外围经度范围:[lon-west,lon-east],纬度范围:[la-south,la-north],高度范围:[hei-min,hei-max]。可从系统配置中
读取上述配置项,经纬高至少一项超过预设范围时,直接剔除对应的目标航迹数据。
[0102]
2)时间校验:获取经过时统的系统当前时间,读取目标航迹数据的时间戳,如果目标航迹数据的时间和系统当前时间之差超过预设时间延迟阈值或目标航迹数据的时间超过目标列表中目标航迹数据的平均时间,直接剔除对应的目标航迹数据。
[0103]
3)速度校验:计算目标列表中目标航迹数据的平均速度,并根据相邻两点之间的位置差和时间差计算各目标航迹数据的瞬时速度,若瞬时速度高于平均速度,直接剔除对应的目标航迹数据。
[0104]
需要说明的是,目标位置校验、时间校验和速度校验的顺序可根据实际需求确定,优选依次进行目标位置校验、时间校验和速度校验。
[0105]
s32、对各目标列表对应的目标进行历史目标航迹数据匹配,执行如下操作:
[0106]
s321、获取缓存的所有历史目的编号,并放入第一数据集;
[0107]
s322、判断缓存中是否存在当前时间窗口对应目标的目的编号,若是,认为存在历史航迹,从第一数据集中移除对应目标的目的编号,并将当前时间窗口对应目标的目标航迹数据进行缓存,同时将对应目标的历史目标航迹数据插入至当前时间窗口该目标对应的目标列表中形成新目标列表,否则,认为不存在历史航迹,将当前时间窗口对应目标的目的编号和目标航迹数据分别对应放入第二数据集和缓存中;
[0108]
s323、在缓存中对当前时间窗口存在的目标进行融合批号检索,若目标已获得过融合批号,则将该融合批号作为对应目标的最新融合批号,并放入第三数据集中。
[0109]
在一实施例中,步骤s322中,对新目标列表还执行如下操作:
[0110]
当新目标列表中的数据量大于预设保留值时,删除在先的历史目标航迹数据直至数据量达到预设保留值的二分之一。
[0111]
其中,历史目标航迹数据匹配是为了获得更加充足的历史目标航迹数据,以及目标已有融合批号。具体地,首先获取缓存中存在的所有历史目的编号,放入第一数据集cacheedtarnoset中。随后是用当前时间窗口的目标的目的编号targetno,检索缓存看历史航迹是否存在,如果历史航迹不存在,将目的编号放入第二数据集newtagnoset中,此集合中将要存放的数据即为当前窗口中新出现的所有目标,并将当前时间窗口对应目标航迹数据放进缓存,作为后续时间窗口的历史目标航迹数据;如果存在历史航迹,则从第一数据集cacheedtarnoset中移除当前时间窗口对应目标的目的编号,并将此目标当前时间窗口中新得到的目标航迹数据追加到缓存中,同时将历史目标航迹数据插入到当前时间窗口中的对应目标的目标列表targetlist中形成新目标列表。进一步地,历史目标航迹数据可为对应目标列表进行异常挑点校验处理后的数据。
[0112]
由于历史目标航迹数据可能会出现比较多的情况,而太久远的历史目标航迹数据对当前新的运动趋势的参考意义不大,甚至会有负面干扰作用。所以需要设定预设保留值max_target_history_point_num,如果新目标列表中数据量大于预设保留值,则将对应目标的历史目标航迹数据进行剔除,而且此处设定剔除后保留的数据量为max_target_history_point_num/2,可避免数据量到达上限后缓存数据频繁的截取更新。剔除之后,新目标列表和缓存中同步更新。然后对当前时间窗口的目标的目的编号targetno做融合批号检索,如果此目的编号已经获得过融合批号,则直接读取该融合批号作为目标的最新融合批号,并将获取到的融合批号放入第三数据集tagfusenomap中。
[0113]
在该阶段,第一数据集cacheedtarnoset,用于存放历史出现过的目的编号中在当前时间窗口不再出现的目标的目的编号;第二数据集newtagnoset,用于存放当前时间窗口中新出现的目的编号;目标地图targetmap,用于存放当前时间窗口出现的目标以及其关联的历史目标航迹数据。
[0114]
s33、对第一数据集中余留目的编号对应的目标进行航迹丢失目标识别,执行如下操作:
[0115]
s331、遍历第一数据集,判断余留的各目标是否存在航迹模型,若是,加载对应的航迹模型,否则,基于对应目标的历史目标航迹数据创建并训练航迹模型,将训练好的航迹模型存入模型集合和缓存中。
[0116]
在一实施例中,步骤s331中,基于对应目标的历史目标航迹数据创建并训练航迹模型,具体如下:
[0117]
s3311、分别基于最小二乘法建立目标的经度、纬度和高度三个维度的模型,公式如下:
[0118][0119]
其中,t为时间,f(t)为目标函数,a
x
为多项式第x次项的常数项系数,m为最大阶数;
[0120]
s3312、判断是否满足pointnum>max-degree+1,其中,pointnum为目标所在新目标列表的数据量,max-degree为预设最大阶数,若是,则最大阶数m=max-degree,否则,最大阶数m=pointnum-1;
[0121]
s3313、根据对应的历史目标航迹数据基于fit方法训练目标三个维度的模型,将训练好的三个模型视为航迹模型。
[0122]
s332、遍历第二数据集,获取各目标所在新目标列表的目标航迹数据;
[0123]
s333、采用加载的航迹模型或训练好的航迹模型预测出与对应目标的目标航迹数据时间点对齐的目标位置,并计算点迹平均误差ε:
[0124][0125]
其中,n为目标所在新目标列表的数据量,为目标在时间点i时的预测经度,为目标在时间点i时的实际经度,为目标在时间点i时的预测纬度,为目标在时间点i时的实际纬度,为目标在时间点i时的预测高度,为目标在时间点i时的实际高度;
[0126]
s334、判断点迹平均误差ε是否小于目标阈值,若是,认为当前时间窗口的对应目标为航迹丢失的历史目标,将对应的当前时间窗口的目标和历史目标进行批号融合处理,否则,认为当前时间窗口的对应目标为新出现的目标。
[0127]
在一实施例中,步骤s334中,批号融合处理,具体如下:
[0128]
从第三数据集和缓存中检索判断对应的历史目标是否分配过融合批号,若是,将
对应目标的原始目标批号和历史目标分配过的融合批号之间的映射信息存入第三数据集和缓存中,否则,重新分配融合批号。
[0129]
其中,对于某个在防区内持续运动的目标,在之前时刻被探测设备观测跟踪过,但是后来由于探测设备盲区或者故障等原因,对此目标的跟踪观测丢失,即一段时间内无此目标的数据出现,但是在当前时间窗口内,探测设备对此目标的观测数据重新出现。由于其目的编号产生了变化,无法直接做历史目标航迹数据关联以及融合批号关联,所以需要通过此航迹丢失目标识别算法关联上此目标与其历史航迹。
[0130]
遍历第一数据集cacheedtarnoset和第二数据集newtagnoset,检索第一数据集cacheedtarnoset中每一个目的编号targetno对应的航迹模型,检索顺序为先从模型集合modelmap中检索,如果没有则从缓存中加载,如果缓存里也不存在,则使用目的编号targetno对应的历史目标航迹数据创建并训练航迹模型,存入模型集合modelmap并放进缓存。航迹模型的训练方法为,对目标航迹中每个目标航迹数据在时间上构成的序列在(time,latitude),(time,longtitude),(time,height)三个维度训练二维的最小二乘模型。其中,a
x
为多项式第x次项的常数项系数,例如,最大阶数m=1时,对应本领域技术人员熟知的线性函数,最大阶数m=2时,对应本领域技术人员熟知的抛物线函数。
[0131]
通过计算得到的经纬高与时间相关的三个模型,三个模型的训练具体方法使用java包org.apache.commons.math3.fitting中polynomialcurvefitter的fit方法,关于航迹模型中航迹曲线多项式函数的阶数,通过配置一个函数式预设最大阶数max-degree确定,本实施例中默认值max-degree=6,或还可根据实际需求调整,如果目标所在新目标列表的数据量pointnum>max-degree+1,航迹曲线多项式函数的结束为最大阶数m=max-degree,否则,最大阶数m=pointnum-1。fit计算得到的经纬高三个关于时间的二维模型组装成自定义的模型实体即为航迹模型,使用得到的航迹模型进行点迹位置预测计算,计算此历史航迹模型下,与对应目标所在新目标列表的目标航迹数据时间点对齐的目标位置,获得点迹平均误差ε。
[0132]
若点迹平均误差ε小于目标阈值,认为当前时间窗口的对应目标为航迹丢失的历史目标,将对应的当前时间窗口的目标和历史目标进行批号融合处理,否则,认为当前时间窗口的对应目标为新出现的目标。进行批号融合处理时,考虑到后续时间,关于此目标的观测数据在一段时间都是使用新的目的编号上报的,如果直接将目的编号统一成历史目的编号,则会导致整个航迹丢失目标识别逻辑大量重复调用。而大量重复计算将导致系统处理能力的下降。此处采用的策略是将当前目标与对应的历史目标应用目标融合逻辑,为了方便描述,记当前新的目的编号为tagno1,对应识别出的跟踪丢失的历史目的编号为tagno0,核心是目标批号融合逻辑。具体操作是:首先从第三数据集tagfusenomap和缓存中检索tagno0分配过的融合批号fuseno,如果存在,则将对应目标的当前原始目标批号oldtagno1和历史目标分配过的融合批号fuseno之间的映射信息(oldtagno1-fuseno)存入第三数据集tagfusenomap和缓存。至于tagno1对应的目标航迹数据此阶段无需其他处理。这样即可避免此目标后续到来时频繁的做航迹丢失目标识别计算,在此目标后续到来时,首先是根据目的编号,已有当前时间窗口出现的数据作为历史目标航迹数据,同时,融合批号已有,可以直接检索得到,无需重复计算,也无需重复做目标批号关联和转换。
[0133]
s34、判定任意两个目标的同一性并进行融合匹配,具体如下:
[0134]
在一实施例中,还执行如下操作:
[0135]
sa1、判断两个目标是否来自同一探测设备,若是,认为目标不满足同一性,否则,执行步骤sa2;
[0136]
sa2、判断两个目标是否分别分配过融合批号,若是,认为目标不满足同一性,否则,执行步骤sa3;
[0137]
sa3、判断两个目标是否存在不融合标识,若是,认为目标不满足同一性,否则,执行步骤s341。
[0138]
由于目标同一性判定算法需要较复杂的计算,所以为了提高数据处理性能,需要对进入同一性判定的数据做拦截筛选,过滤不必要的计算,针对当前时间窗口中出现的目标,目的编号不一致时,如果来自同一设备,不可能是同一目标的数据;如果两个不同目的编号的目标,各自都能从第三数据集tagfusenomap或者缓存中检索到融合批号,则不可能是同一目标的数据;如果通过对当前两个目的编号缓存数据检索,得到不融合标识,即表明当前两个目标在历史时间窗口上已经过计算,且判定不是同一个目标,则无需再次进行同一性判定计算。
[0139]
经过以上的筛选处理,会减少大部分的计算,因为在一般的多目标环境中,需要融合的目标数据所占的比例不会很高,所以会有很一大部分的目标数据之间的同一性计算结果是不具备同一性。基于此前提,以上的筛选处理对计算的性能提升作用是明显的。
[0140]
目标同一性判定算法主要包括航迹模型算法选择、航迹模型基准目标选择、航迹预测、航迹评估、融合批号分配,具体如下:
[0141]
s341、将其中一个目标记为模型基准目标,另一个目标记为对齐目标,并为模型基准目标选择模型算法。
[0142]
在一实施例中,步骤s341中,将其中一个目标记为模型基准目标,另一个目标记为对齐目标,并为模型基准目标选择模型算法,具体如下:
[0143]
当两个目标所在新目标列表中的数据量均等于2时,模型算法选择线性函数模型,以时间跨度大的目标作为模型基准目标;
[0144]
当两个目标所在新目标列表中的数据量分别等于2和3时,模型算法选择抛物线函数模型,以数据量多的目标作为模型基准目标;
[0145]
当两个目标所在新目标列表中的数据量均等于3时,模型算法选择抛物线函数模型,选取任一目标作为模型基准目标;
[0146]
当两个目标所在新目标列表中的数据量均大于3时,获取两个目标互落于对方时间范围内的数据量,若落于对方时间范围内的数据量大于第一预设阈值且对方的数据量大于第二预设阈值,则模型算法选择三次样条插值模型,以对方作为模型基准目标,否则,模型算法选择最小二乘法模型,以数据量多的目标作为模型基准目标。
[0147]
其中,模型算法选择主要是应对目标航迹中点迹数量以及点迹时间交叉分布情况而设立的,对于两个目标对应的新目标列表中的数据量不足2个的,不参与同一性计算,直接进行上报或过滤。
[0148]
当两个目标所在新目标列表中的数据量均大于3时,计算两个目标点迹时间交叉,如将两个目标对应的目标航迹数据集合按如下表示:
[0149]
target-a:[tag
t1
,tag
t2
,tag
t3
,...,tag
tn
],
[0150]
target-b:[tag
k1
,tag
k2
,tag
k3
,...,tag
km
]
[0151]
其中,t1,t2
…
tm表示目标target-a中所有点的时间戳;k1,k2,
…
km表示目标target-b中所有点的时间戳,且是时间上有序的。故t1为目标target-a数据中的最早时间点,记为amintime,tn为目标target-a数据中的最晚时间点,记为amaxtime;对应地,记目标target-b数据中的最早时间点k1为bmintime,目标target-b数据中的最晚时间点km为bmaxtime。定义atimeinnerbsum表示target-a中点在[bmintime,bmaxtime]范围内的数量,定义btimeinnerasum表示target-b中点在[amintime,amaxtime]范围内的数量。如果atimeinnerbsum>5并且target-b目标点数大于10,则target-b作为模型基准目标,且航迹模型选择三次样条插值模型;如果btimeinnerasum>5并且target-a>10,则target-a作为模型基准目标,且航迹模型选择三次样条插值模型。否则,航迹模型选择最小二乘法模型,且目标点数较多的目标作为模型基准目标。将模型基准目标记为basetarget,剩下的另一个目标作为对齐目标,记为aligntarget。
[0152]
s342、基于所选模型算法建立模型基准目标的预测模型,并采用模型基准目标所在新目标列表的目标航迹数据训练获得最终预测模型;
[0153]
s343、基于内插法或外推法在最终预测模型上预测与对齐目标的目标航迹数据时间点对齐的目标位置;
[0154]
s344、判断预测的目标位置与对齐目标的目标位置之间的平均距离误差是否小于预设距离阈值,若是,目标满足同一性,判定为同一个目标,检索目标是否已分配有融合批号,若任一目标具备融合批号,则应用融合批号传递逻辑共用该融合批号,若两个目标均未分配过融合批号,则以较早出现的目标的目的编号作为共用的融合批号,并将分配到的融合批号保存到第三数据集和缓存中;否则,目标不满足同一性,向缓存中添加两个目标的不融合标识。
[0155]
其中,根据选定的模型算法以及模型基准目标的点位数据训练模型,获得最终预测模型,并根据内插法或外推法在最终预测模型上预测与对齐目标的目标航迹数据时间点对齐的目标位置,得到预测点位数据。使最终的点迹数据在时间点上对齐到目标数据较少的设备上报的时间点上,然后对时间点对齐的多设备上报数据进行融合计算。如果预测的目标位置与对齐目标的目标位置之间的平均距离误差小于预设距离阈值minimum_distance_threshold,则两个目标航迹判定为同一个目标,即表示这两个目标其实是不同的设备对同一个目标的观测,要对其做融合批号的分配。如果平均距离误差大于minimum_distance_threshold,则表明当前两个目标不属于同一航迹,向缓存中添加不融合标识,后续的同一性算法在做目标组合时就根据此数据,不再做重复计算。平均距离误差的计算方法同点迹平均误差ε的计算,在此不再赘述。
[0156]
融合批号分配:首先检索两个目的编号各自是否已有分配的融合批号,如果任意一个具备融合批号,则应用融合批号传递逻辑,这里的原理在于:如果a与b是同一目标航迹,而b跟c经过计算也属于同一目标的航迹,则a-b-c都属于同一个目标的航迹,所以a跟c无需再做同一性计算,可通过融合批号传递原理直接获得融合批号。如果两者都未获得过融合批号,则选择两个目标中,出现较早的目标的目的编号作为两者此后的融合批号。然后对分配到的融合批号保存到第三数据集tagfusenomap和缓存中。
[0157]
s35、将同一目标当前时间窗口下的目标航迹数据归为一组,基于卡尔曼滤波平滑
处理对本次分组后的各目标对应的目标航迹数据进行误差矫正。可进一步提高精度。
[0158]
s36、根据误差矫正后的目标航迹数据评估对应目标的威胁等级,并将威胁等级评分输出至第二消息队列以供订阅。
[0159]
在一实施例中,步骤s36中,威胁等级评分final-threat-score,计算如下:
[0160][0161][0162]
其中,fy(facy)为威胁因素facy的威胁评估分数,αy为目标威胁权重系数,n为威胁因素的总数。
[0163]
在一实施例中,威胁因素facy包括目标距离防区中心点的位置、目标实时速度、目标类型、目标的工作状态、目标的航向角、防区中心点的安全级别。
[0164]
其中,采用误差矫正后的目标航迹数据对目标当前的位置进行威胁评估,定义防区中心点为centerpoint。威胁因素的数量和类型可根据实际需求调整。如图6所示,本实施例中威胁因素facy包括目标距离防区中心点的位置fac1(距离防区中心点不同距离范围拥有不同等级的威胁性)、目标实时速度fac2(目标相对防区中心点方向的径向速度越大,威胁性越高)、目标类型fac3(不同类型的目标拥有不同的固有威胁性,如无人机目标相对于飞鸟拥有更大的威胁性)、目标的工作状态fac4(无人机突进状态比悬停状态拥有更高的威胁性)、目标的航向角fac5(对应目标运动方向与中心点方向的角度,角度越小,威胁性越大)、防区中心点的安全级别fac6(当前防御中心点的安全等级,重要性越高,威胁性越大)。威胁因素的威胁权重对应包括目标距离防区中心点的位置威胁值th1、目标实时速度威胁值th2、目标类型威胁值th3、目标的工作状态威胁值th4、目标的航向角威胁值th5、防区中心点的安全级别威胁值th6。可通过提供可视化的目标威胁因素评估配置工具和目标威胁权重配置工具进行评估,其中,目标威胁因素评估配置工具用于实现威胁因素评估配置和因素权重(威胁因素的威胁权重)配置,如在目标威胁因素评估配置工具界面输入对应的因素配置文件,例如目标距离防区中心点的位置fac1,因素配置文件中定义描述有0-500m高风险范围威胁得分规则,500-1500m中风险范围威胁得分规则等具体计分规则,同时因素配置文件也会附带此威胁因素的因素权重,基于这些信息生成配置信息fy(facy),保存到缓存中做高速检索,如图7、8所示,仅为示意,并不代表本实施例完整的配置,界面中配置有目标距离防区中心点的位置fac1(距离f1)、目标的航向角fac5(航向角f2)。经过目标威胁因素评估计算之后,再根据目标威胁权重配置工具中的威胁权重分配,得到最终的综合威胁评分final-threat-score。威胁等级评分输出至第二消息队列即可供下游系统订阅。
[0165]
该方法通过对探测设备上报目标的目标批号的统一编批和融合批号分配相对于强依赖设备标识信息的方法具有更好的可理解性和系统维护性;基于动态时间窗口对上报
的目标航迹数据进行预分组,在一个处理时间窗口内能够获取同目标更多的目标航迹数据,有助于提升融合计算结果的准确性,同时使用了基于历史目标航迹数据关联的方式,能很好的解决当前时间窗口内目标数据量不足造成的实时结果精确度波动的问题,并可避免目标航迹逐个计算带来的偶然误差和降低信息处理系统性能开销,保证数据的实时性和高可用性;通过高速缓存保存以及检索目标航迹的历史目标轨迹数据,动态分配历史目标航迹数据参与航迹融合计算,一方面补充当前时间窗口中的数据量,另一方面,针对历史数据较多的情况,基于数量和时间对历史数据进行剔除和丢弃,避免久远的历史航迹数据对结果造成过拟合的影响,支持航迹丢失目标的识别和关联,能够在软件层面很好的弥补硬件部署和设备工作异常状态下的目标统计和分析能力;通过可动态增加和扩展的异常挑点校验处理排除异常数据点,降低干扰,有助于提高运算速度和精度;相对于现有技术中基于设备联动的融合方法和单一种类设备数据融合方法,该方法具有更强的通用性,不受制于设备类型和设备数量,只要是能够稳定上报目标航迹数据的设备,都能统一处理,且对设备上报数据的频率无任何特别要求;相对于传统融合方法中的目标航迹同一性识别,该方法通过数据缓存匹配,提出目标融合批号传递概念,大大降低同一性计算量,提升了系统数据处理能力;相对于现有技术中基于目标航迹时空对准的融合方法,该方法还可实现基于非时空对准数据的同一目标航迹识别,在此阶段对原始的所有目标数据不做挑选舍弃,且在同一融合时使用各自的真实上报数据,能够更充分的应用各探测设备的原始目标航迹数据,提高轨迹的真实性;完善的融合数据检索体系,在航迹丢失目标识别和融合匹配过程中,无需频繁重复计算数据匹配挑选,减少不必要的复杂核心计算逻辑;目标同一性判定过程中的航迹模型动态分配逻辑,同时还有动态的模型基准目标选择策略,相较于单一的匹配逻辑,能够更好的适应目标航迹数据的数量不确定性和时间分配不均匀性,提升准确性,使同一判定结果更加可靠;基于卡尔曼滤波平滑处理方法对同一性判定后的全量目标航迹做轨迹平滑处理和位置误差矫正,将具有同一性的目标进行融合匹配,实现同目标多航迹关联识别计算,可准确识别出防区内目标的真实数量和还原目标真实运动轨迹,有利于在实现全方位动态可扩展的目标威胁等级评估时提高评估准确性。
[0166]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0167]
以上所述实施例仅表达了本技术描述较为具体和详细的实施例,但并不能因此而理解为对申请专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。因此,本技术专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1