一种激光跟踪仪测量磨机同轴度的方法与流程
1.本发明涉及机械设备技术领域,尤其涉及一种激光跟踪仪测量磨机同轴度的方法。
背景技术:
2.目前球磨机空心轴同轴度无法通过全站仪进行测量,主要因为全站仪的精度达不到测量精度要求,近年来激光跟踪仪测量技术正在不断发展,为解决球磨机空心轴同轴度测量的难题提供了技术手段,近年出现了一种专利测量技术见cn 103837100 a《激光跟踪仪在大型球磨机中空轴同轴度测量中的应用》,此技术能够解决球磨机空心轴同轴度测量问题,但是此技术在一定程度上反映不出球磨机实际同轴度的实际情况,所以迫切需要寻找一种更加能够反映球磨机实际同轴度的技术。
3.对比资料1:激光跟踪仪在大型球磨机中空轴同轴度测量中的应用
4.其涉及大型球磨机安装。尤其涉及激光跟踪仪在大型球磨机安装中的应用。一种激光跟踪仪在大型球磨机中空轴同轴度测量中的应用,它包括下列步骤:步骤一,现场架设激光跟踪仪;步骤二,校正激光跟踪仪;步骤三,数据采集,使用靶球进行数据的采集;步骤四,数据处理,构造出球磨机的进料端和出料端中空轴的三维图形、进、出料端构造出料端中空轴中心线上的三个点,包括两个端点和中间点;再以进料端中空轴中间点和出料端中空轴中间点两点构建两轴之间的公轴线;测量比较进料端中空轴端两个端点、出料端中空轴两个端点共计四点到公轴线的距离,距离值最大者即为大型球磨机中空轴的同轴度值。其建立的公共轴线偏差稍大。
技术实现要素:
5.为了解决上述技术问题,本发明的目的是提供一种激光跟踪仪测量磨机同轴度的方法,用于球磨机两端空心轴同轴度检测,该发明不需要其它辅助测量工具,测量精度高、准确可靠。
6.为解决上述技术问题,本发明采用如下技术方案:
7.本发明一种激光跟踪仪测量磨机同轴度的方法,具体实施步骤包括:
8.①
架设激光跟踪仪,进行调平校准;
9.②
激光跟踪仪配合靶球和电脑,分别对入口、出口空心轴外表面进行取点测量,配合电脑软件拟合成为圆柱,找到出料端轴线和进料端轴线;
10.③
分别找到进料端、出料端空心轴的轴线端点:出料端空心轴外端点、出料端空心轴内端点、进料端空心轴内端点、进料端空心轴外端点;
11.④
使用出料端空心轴外端点、出料端空心轴内端点、进料端空心轴内端点、进料端空心轴外端点拟合一条总轴线;
12.⑤
根据总轴线找到进料端总轴线端点、出料端总轴线端点和总轴线中点;
13.⑥
建立坐标系:第一要素为总轴线中点,第二要素为总轴线,第三要素为大地水平
面;
14.⑦
有效数据提取:从激光跟踪仪测量软件中读出出料端空心轴外端点1三维坐标(x1、y1、z1)、出料端空心轴内端点2三维坐标(x2、y2、z2)、进料端空心轴内端点3三维坐标(x3、y3、z3)、进料端空心轴外端点4三维坐标(x4、 y4、z4);
15.⑧
数据分析:出料端空心轴外端点1、出料端空心轴内端点2、进料端空心轴内端点3、进料端空心轴外端点4在水平方向的偏差分别为y1、y2、y3、y4,在垂直方向的偏差分别为z1、z2、z3、z4。
16.与现有技术相比,本发明的有益技术效果:
17.本发明不需要其它辅助测量工具,测量精度高、准确可靠。
附图说明
18.下面结合附图说明对本发明作进一步说明。
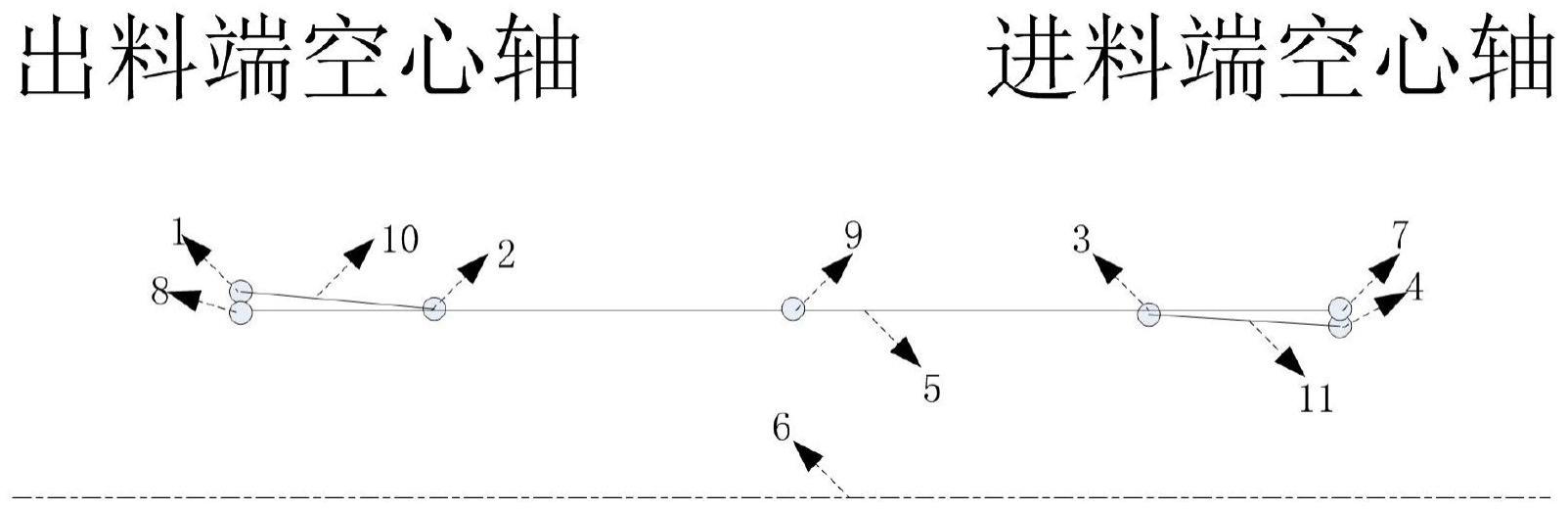
19.图1为磨机俯视图;
20.图2为某球磨机同轴度偏差测量结果。
21.附图标记说明:1-出料端空心轴外端点;2-出料端空心轴内端点;3-进料端空心轴内端点;4-进料端空心轴外端点;5-总轴线;6-大地水平面;7-出料端总轴线端点;8-出料端总轴线端点;9-总轴线中点;10-出料端轴线;11-进料端轴线。
具体实施方式
22.结合图1、2,下面就通过这个给出的实施例来对本发明一种激光跟踪仪测量磨机同轴度的方法进行示例性说明。
23.具体实施步骤包括:
24.①
架设激光跟踪仪,进行调平校准;
25.②
激光跟踪仪配合靶球和电脑,分别对入口、出口空心轴外表面进行取点测量,配合电脑软件拟合成为圆柱,找到出料端轴线10和进料端轴线11;
26.③
分别找到进料端、出料端空心轴的轴线端点:出料端空心轴外端点1、出料端空心轴内端点2、进料端空心轴内端点3、进料端空心轴外端点4;
27.④
使用出料端空心轴外端点1、出料端空心轴内端点2、进料端空心轴内端点3、进料端空心轴外端点4拟合一条总轴线5;
28.⑤
根据总轴线5找到进料端总轴线端点7、出料端总轴线端点8和总轴线中点9;
29.⑥
建立坐标系:第一要素为总轴线中点9,第二要素为总轴线,第三要素为大地水平面6;
30.⑦
有效数据提取:从激光跟踪仪测量软件中读出出料端空心轴外端点1三维坐标(x1、y1、z1)、出料端空心轴内端点2三维坐标(x2、y2、z2)、进料端空心轴内端点3三维坐标(x3、y3、z3)、进料端空心轴外端点4三维坐标(x4、 y4、z4);
31.⑧
数据分析:出料端空心轴外端点1、出料端空心轴内端点2、进料端空心轴内端点3、进料端空心轴外端点4在水平方向的偏差分别为y1、y2、y3、y4,在垂直方向的偏差分别为z1、z2、z3、z4。
32.通过这种数据处理方法合理的将磨机同轴度偏差均衡到进、出料端的四个端点,
反映出来设备的真实状态,图2为某球磨机同轴度偏差测量结果,其测量精度高,准确可靠。
33.以上所述的实施例仅是对本发明的优选方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
技术特征:
1.一种激光跟踪仪测量磨机同轴度的方法,其特征在于,具体实施步骤包括:
①
架设激光跟踪仪,进行调平校准;
②
激光跟踪仪配合靶球和电脑,分别对入口、出口空心轴外表面进行取点测量,配合电脑软件拟合成为圆柱,找到出料端轴线和进料端轴线;
③
分别找到进料端、出料端空心轴的轴线端点:出料端空心轴外端点、出料端空心轴内端点、进料端空心轴内端点、进料端空心轴外端点;
④
使用出料端空心轴外端点、出料端空心轴内端点、进料端空心轴内端点、进料端空心轴外端点拟合一条总轴线;
⑤
根据总轴线找到进料端总轴线端点、出料端总轴线端点和总轴线中点;
⑥
建立坐标系:第一要素为总轴线中点,第二要素为总轴线,第三要素为大地水平面;
⑦
有效数据提取:从激光跟踪仪测量软件中读出出料端空心轴外端点三维坐标(x1、y1、z1)、出料端空心轴内端点三维坐标(x2、y2、z2)、进料端空心轴内端点三维坐标(x3、y3、z3)、进料端空心轴外端点三维坐标(x4、y4、z4);
⑧
数据分析:出料端空心轴外端点、出料端空心轴内端点、进料端空心轴内端点、进料端空心轴外端点在水平方向的偏差分别为y1、y2、y3、y4,在垂直方向的偏差分别为z1、z2、z3、z4。
技术总结
本发明公开了一种激光跟踪仪测量磨机同轴度的方法,具体实施步骤包括:架设激光跟踪仪,进行调平校准;激光跟踪仪配合靶球和电脑,分别对入口、出口空心轴外表面进行取点测量,配合电脑软件拟合成为圆柱,找到出料端轴线和进料端轴线;分别找到进料端、出料端空心轴的轴线端点:出料端空心轴外端点、出料端空心轴内端点、进料端空心轴内端点、进料端空心轴外端点;使用出料端空心轴外端点、出料端空心轴内端点、进料端空心轴内端点、进料端空心轴外端点拟合一条总轴线;根据总轴线找到进料端总轴线端点、出料端总轴线端点和总轴线中点;建立坐标系。本发明用于球磨机两端空心轴同轴度检测,不需要其它辅助测量工具,测量精度高、准确可靠。确可靠。确可靠。
技术研发人员:苏保全 陈林
受保护的技术使用者:包头钢铁(集团)有限责任公司
技术研发日:2022.04.18
技术公布日:2022/8/30
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1