使用超声波的针对停车路径和环境周围的障碍物的确定方法和确定装置与流程
本发明涉及一种使用超声波确定停车路径上及其周围的障碍物是否位于车辆的停车路径中的技术。
背景技术:
1、多个超声波传感器安装在车辆中,用于在诸如停车的情况下检测靠近车辆的对象。
2、例如,多个超声波传感器在车辆的前保险杠、后保险杠等上安装为彼此水平间隔开。
3、超声波传感器通过发射超声波并然后接收该对象反射的超声波来检测对象。
4、上述作为技术背景描述的事项仅旨在更好地理解本发明的背景,而不应被视为对它们属于本领域技术人员已知的常规技术的承认。
技术实现思路
1、本发明的一个目的在于提供一种使用超声波的针对车辆要在其上行驶以进行停车的停车路径上及其周围的障碍物的确定方法和确定装置,用于使用安装在车辆中的超声波传感器来确定停车路径上及其周围的障碍物是存在于该车辆的停车路径的内部还是外部,从而允许执行更平稳、更安全的停车。
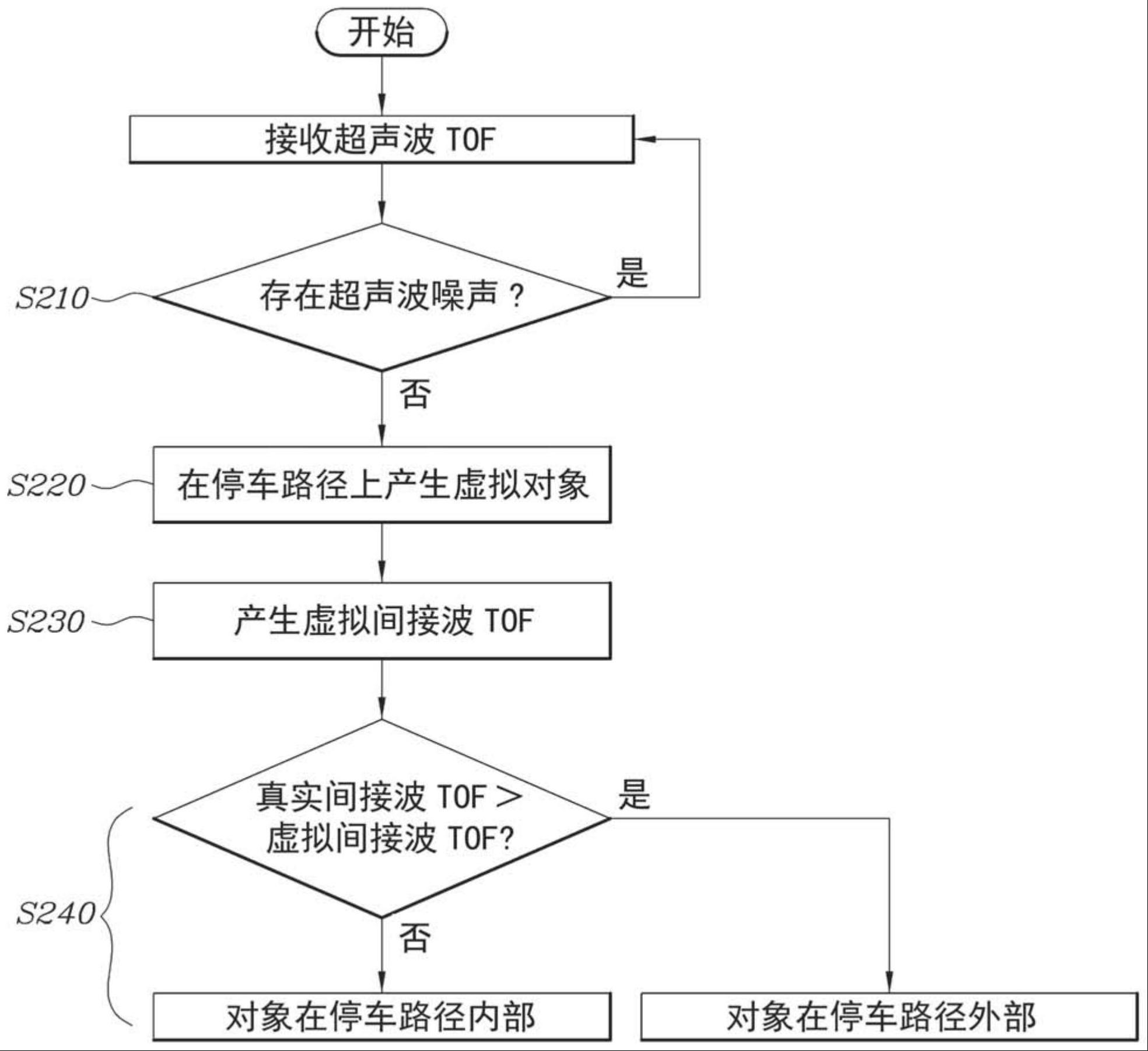
2、为了实现上述目的,根据本发明的使用超声波的针对停车路径上及其周围的障碍物的确定方法包括:确定在接收到的、由对象反射的超声波的飞行时间(tof)内是否存在超声波噪声;当不存在超声波噪声时,基于接收到的超声波tof,在车辆要在其上行驶的停车路径的轮廓上产生虚拟对象;使用虚拟对象来产生虚拟间接波tof;以及通过将真实间接波tof与虚拟间接波tof进行比较,确定该对象是位于停车路径的轮廓内部还是外部,该真实间接波tof是接收到的超声波tof中的间接波tof。
3、在确定是否存在超声波噪声时,当直接波tof和间接波tof两者都存在并且在接收到的超声波tof中既不存在动态噪声又不存在静态噪声时,可以确定不存在超声波噪声。
4、在以下情况下可以确定产生了动态噪声:
5、d(直接波htof)>vdt
6、其中
7、直接波htof=直接波tof/2,
8、d(直接波htof)=直接波htoft=n–直接波htoft=n-1[m],
9、v:车速,以及
10、dt:超声波更新周期[ms]。
11、在以下情况下可以确定产生了静态噪声:
12、|直接波htof–间接波htof|>传感器之间的距离/2
13、其中
14、htof=tof/2;以及
15、“传感器之间的距离”是指发射并接收直接波的传感器与接收间接波的传感器之间的距离。
16、可以在圆与停车路径的轮廓相交的交点处产生虚拟对象,其中该圆以发射并接收直接波的传感器的位置为圆心并以直接波htof为半径。
17、虚拟间接波tof可以被计算为将发射并接收直接波的传感器的位置与虚拟对象相连的直线以及将虚拟对象与接收间接波的传感器的位置相连的直线之和。
18、在确定对象是位于停车路径的轮廓内部还是外部时,当发射并接收直接波的传感器相较于接收间接波的传感器而位于停车路径的外侧时,如果真实间接波tof大于虚拟间接波tof,则可以确定该对象位于停车路径的轮廓外部,而如果真实间接波tof等于或小于虚拟间接波tof,则可以确定对象位于停车路径的轮廓内部。
19、安装在车辆中的多个传感器可以依次发射超声波,并且每次从各个传感器发射超声波时,可以针对两个相邻传感器重复执行上述步骤。
20、此外,为了实现上述目的,根据本发明的使用超声波的针对停车路径上及其周围的障碍物的确定装置可以包括:噪声确定单元,该噪声确定单元确定在接收到的、由对象反射的超声波的tof内是否存在超声波噪声;虚拟对象产生单元,当噪声确定单元确定不存在超声波噪声时,该虚拟对象产生单元基于接收到的超声波tof,在车辆要在其上行驶的停车路径的轮廓上产生虚拟对象;虚拟间接波产生单元,使用由虚拟对象产生单元产生的虚拟对象来产生虚拟间接波tof;以及对象位置确定单元,通过将真实间接波tof与虚拟间接波tof进行比较,确定该对象是存在于停车路径的轮廓内部还是外部,该真实间接波tof是接收到的超声波tof中的间接波tof,且虚拟间接波tof是由虚拟间接波产生单元产生的。
21、噪声确定单元可以被配置为包括动态噪声确定单元和静态噪声确定单元,并且当直接波tof和间接波tof两者都存在且在接收到的超声波tof内既不存在动态噪声又不存在静态噪声时,确定不存在超声波噪声。
22、动态噪声确定单元可以被配置为在以下情况下确定产生了动态噪声:
23、d(直接波htof)>vdt
24、其中
25、直接波htof=直接波tof/2,
26、d(直接波htof)=直接波htoft=n-直接波htoft=n-1[m],
27、v:车速,以及
28、dt:超声波更新周期[ms]。
29、静态噪声确定单元可以被配置为在以下情况下确定产生了静态噪声:
30、|直接波htof–间接波htof|>传感器之间的距离/2
31、其中
32、htof=tof/2;以及
33、“传感器之间的距离”是指发射并接收直接波的传感器与接收间接波的传感器之间的距离。
34、虚拟对象产生单元可以被配置为:在圆与停车路径的轮廓相交的交点处产生虚拟对象,其中该圆以发射并接收直接波的传感器的位置为圆心并以直接波htof为半径。
35、虚拟间接波产生单元可以被配置为:将虚拟间接波tof计算为将发射并接收直接波的传感器的位置与虚拟对象相连的直线以及将虚拟对象与接收间接波的传感器的位置相连的直线之和。
36、当发射并接收直接波的传感器相较于接收间接波的传感器而位于停车路径的外侧时,对象位置确定单元可以被配置为:如果真实间接波tof大于虚拟间接波tof,则确定该对象位于停车路径的轮廓外部,而如果真实间接波tof等于或小于虚拟间接波tof,则确定对象位于停车路径的轮廓内部。
37、本发明允许使用安装在车辆中的超声波传感器来确定位于车辆要在其上行驶以进行停车的停车路径上或其周围的障碍物是在该车辆的停车路径的内部还是外部,从而允许执行更平稳、更安全的停车。
技术特征:
1.一种针对停车路径上及其周围的障碍物的确定方法,车辆要在所述停车路径上移动,所述确定方法包括:
2.根据权利要求1所述的确定方法,其中,在确定是否存在超声波噪声时,当直接波tof和间接波tof两者都存在并且在所述接收到的超声波tof内既不存在动态噪声又不存在静态噪声时,确定不存在超声波噪声。
3.根据权利要求2所述的确定方法,其中,在以下情况下确定产生了所述动态噪声:
4.根据权利要求2所述的确定方法,其中,在以下情况下确定产生了所述静态噪声:
5.根据权利要求1所述的确定方法,其中,所述虚拟对象产生在圆与所述停车路径的轮廓相交的交点处,其中所述圆以发射并接收直接波的传感器的位置为圆心并以直接波htof为半径。
6.根据权利要求5所述的确定方法,其中,所述虚拟间接波tof被计算为将发射并接收直接波的传感器的位置与所述虚拟对象相连的直线以及将所述虚拟对象与接收间接波的传感器的位置相连的直线之和。
7.根据权利要求6所述的确定方法,其中,在确定所述对象是位于所述停车路径的轮廓内部还是外部时,当发射并接收直接波的传感器位于所述停车路径的外侧时,如果真实间接波tof大于虚拟间接波tof,则确定所述对象位于所述停车路径的轮廓外部,并且如果真实间接波tof等于或小于虚拟间接波tof,则确定所述对象位于所述停车路径的轮廓内部。
8.根据权利要求1所述的确定方法,其中,安装在所述车辆中的多个传感器依次发射超声波,并且每次各个传感器发射所述超声波时,由相邻两个传感器重复执行确定是否存在超声波噪声的步骤到确定所述对象是位于所述停车路径的轮廓内部还是外部的步骤。
9.一种针对停车路径上及其周围的障碍物的确定装置,车辆要在所述停车路径上移动,所述确定装置包括:
10.根据权利要求9所述的确定装置,其中,所述噪声确定单元包括动态噪声确定单元和静态噪声确定单元,并且当直接波tof和间接波tof两者都存在并且在接收到的超声波tof内既不存在动态噪声又不存在静态噪声时,确定不存在超声波噪声。
11.根据权利要求10所述的确定装置,其中,所述动态噪声确定单元被配置为在以下情况下确定产生了所述动态噪声:
12.根据权利要求10所述的确定装置,其中,所述静态噪声确定单元被配置为在以下情况下确定产生了所述静态噪声:
13.根据权利要求9所述的确定装置,其中,所述虚拟对象产生单元在圆与所述停车路径的轮廓相交的交点处产生所述虚拟对象,其中所述圆以发射并接收直接波的传感器的位置为圆心并以直接波htof为半径。
14.根据权利要求13所述的确定装置,其中,所述虚拟间接波产生单元将间接波tof计算为将发射并接收直接波的传感器的位置与所述虚拟对象相连的直线以及将所述虚拟对象与接收间接波的传感器的位置相连的直线之和。
15.根据权利要求14所述的确定装置,其中,当发射并接收直接波的传感器位于所述停车路径的外侧时,如果间接波tof大于虚拟间接波tof,则所述对象位置确定单元确定所述对象位于所述停车路径的轮廓外部,并且如果真实间接波tof等于或小于虚拟间接波tof,则确定所述对象位于所述停车路径的轮廓内部。
技术总结
一种针对障碍物的确定方法包括:确定在接收到的、由对象反射的超声波的TOF内是否存在超声波噪声;基于接收到的超声波TOF,在车辆要在其上行驶的停车路径的轮廓上产生虚拟对象;使用虚拟对象来产生虚拟间接波TOF;以及通过将真实间接波TOF与虚拟间接波TOF进行比较,确定该对象是位于停车路径的轮廓内部还是外部,该真实间接波TOF是接收到的超声波TOF中的间接波TOF。
技术研发人员:金刚熙
受保护的技术使用者:现代摩比斯株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!