一种基于图像识别的移动机器人楼层判断方法与流程
1.本发明涉及移动机器人技术领域,尤其涉及一种基于图像识别的移动机器人楼层判断方法。
背景技术:
2.随着我国科学技术的不断发展,移动机器人开始楼宇的不同楼层移动,以提供迎宾引导跨楼层运送物品等服务,自从马云提出“新零售”概念以来,无人快递,无人超市,无人饭店等如雨后春笋般涌现,机器人配送和当前的无人车的实现都基于对周围环境有充分了解的基础上,这其中的关键技术之一就是基于视觉或激光的同步定位与地图构建技术,简称slam。
3.自从上世纪80年代slam概念的提出到现在,slam技术已经走过了30多年的历史。slam系统使用的传感器在不断拓展,从早期的声呐,到后来的2d/3d激光雷达,再到单目、双目、rgbd、tof等各种相机,以及与惯性测量单元imu等传感器的融合;slam的算法也从开始的基于滤波器的方法(ekf、pf等)向基于优化的方法转变,技术框架也从开始的单一线程向多线程演,大多数领先的服务机器人公司都采用了slam技术。只有(slamtec)硅烷技术在slam技术中具有独特的优势, slam技术是指机器人在未知环境中进行定位、地图绘制和路径规划的全过程,自1988年提出机器人定位与实时地图同步定位以来,主要应用于实时地图定位与施工。对于完全未知的室内环境,配备激光雷达等核心传感器,slam技术可以帮助机器人建立室内环境地图,帮助机器人自主行走,slam问题可以描述为:机器人在未知环境中从未知位置移动,根据移动过程中的位置估计和传感器数据进行定位,同时建立增量地图。
4.移动服务机器人这个名称可能大家听起来比较陌生,但是如果举例大家就很清楚了,例如扫地机器人、无人机、无人驾驶等,就是用于完成特定的服务功能的机器人。这类机器人的特点是应用场景复杂多变、运动能力强,需要具备自我定位导航能力和姿态控制能力。其背后使用的计算平台和移动速度,以及应用场景密切相关。对于移动速度相对较慢的,硬件平台使用嵌入式arm芯片就可以满足计算能力需求。移动速度较快的,如无人机和无人驾驶领域,往往对环境感知处理能力要求也比较高,目前通常基于gpu提供算力支持。
5.近年来,服务机器人技术迅猛发展,在生活中的应用场景也越来越多,视觉导航机器人是服务机器人的一种,涉及电机控制、图像识别、数据处理等各个领域的技术,在视觉导航定位系统中,目前国内外应用较多的是基于局部视觉的在机器人中安装车载摄像机的导航方式。在这种导航方式中,控制设备和传感装置装载在机器人车体上,图像识别、路径规划等高层决策都由车载控制计算机完成。
6.但是,然而,移动复位机器人在任务执行的过程中会遭遇人的误操作或恶意搬动,导致移动机器人放置在非执行任务的错误的楼层中,但是在实际楼宇环境中,多个楼层大部分区域是相似的,比如大厅、走廊,这些区域的相似度极高,很难通过视觉传感器采集的数据直接进行楼层的判断,从而导致了移动机器人误出现在错误的楼层后,无法继续执行
当前的任务,影响了移动机器人的工作效率。
技术实现要素:
7.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种基于图像识别的移动机器人楼层判断方法。
8.为了实现上述目的,本发明采用了如下技术方案:一种基于图像识别的移动机器人楼层判断方法,包括移动机器人本体、驱动模块、主控系统、视觉导航系统和导航标签,所述主控系统和视觉导航系统均设置于移动机器人本体的内部,所述移动机器人本体的内部设置有双目识别模块,所述主控系统分别与视觉导航系统和双目识别模块电性连接,所述导航标签为可以反射红外光线的标签贴纸,所述导航标签设置有若干个,且若干个导航标签粘贴在每个楼层的电梯间、大厅和过道的墙壁表面,所述视觉导航系统包括红外线发射器和红外线摄像机,所述主控系统还包括楼层分析模块。
9.一种基于图像识别的移动机器人楼层判断方法,包括以下步骤:步骤一、所述移动机器人本体通过驱动模块进行移动,并利用红外线发射器发出红外光线,对大厅、过道或电梯间的墙壁进行发射扫描。
10.步骤二、所述导航标签反射由红外线发射器发出的红外光线,所述红外线摄像机接收经导航标签反射后的红外光线,红外线摄像机捕捉由导航标签上反射红外光线的区域所构成的图像信息。
11.步骤三、所述红外线摄像机根据接收到的红外光线绘制图像信息,所述红外线摄像机将图像信息传输给主控系统。
12.步骤四、所述主控系统将红外线摄像机拍摄的图像信息发送至楼层分析模块,由楼层分析模块对数据进行处理,并根据图像处理的后的数据运算得出楼层信息,同时主控系统指定新的导航线路。
13.步骤五、所述主控系统将导航线路传输给移动机器人的驱动模块,再由驱动模块驱使移动机器人本体进行移动,从而使移动机器人本体移动至楼层的电梯门位置。
14.优选地,所述双目视觉模块包括双目识别摄像机,所述双目识别摄像机用于采集环境信息,所述环境信息包括路况信息和障碍信息。
15.优选地,所述移动机器人本体的内部设置有slam导航系统,所述slam导航系统与主控系统通信连接。
16.优选地,所述红外线发射器和红外线摄像机分别与主控系统通信连接。
17.优选地,所述移动机器人本体的表面设置有云台,云台可进行360度无死角旋转,所述红外线发射器、红外线摄像机和双目识别摄像机均设置在云台的表面。
18.优选地,所述移动机器人本体的内部设置有物联网模块,所述物联网模块通过无线网络与电梯的物联网控制器进行通信连接。
19.本发明具有以下有益效果:1、该基于图像识别的移动机器人楼层判断方法,通过在建筑物中的各个楼层电梯间、大厅和过道墙壁表面设置有若干个导航标签,且导航标签为可以反射红外线的标签贴纸,且再通过在移动机器人的的表面设置有红外线发射器和红外线摄像机,可以由红外线发射器向导航标签发射红外线,再由导航标签将红外线发射后被红外线摄像头捕获,从而
通过视觉导航系统对导航标签的楼层信息进行识别,从而达到帮助移动机器人进行楼层判断和识别的目的,解决了现有移动机器人视觉识别楼层过程中受环境光反射等干扰因素,导致楼层判断难度大的问题,有助于提高移动机器人的工作效率。
20.2、该基于图像识别的移动机器人楼层判断方法,通过在移动机器人的表面设置有云台,且在云台的表面设置有双目识别摄像头,可以利用双目识别摄像头采集环境信息,从而快速获取室内的路况信息和障碍物信息,比起现有移动机器人普遍采用的红外距离传感方式,利用双目识别摄像机可以达到更高的识别精准度,从而有利于提高移动机器人的视觉导航效率。
附图说明
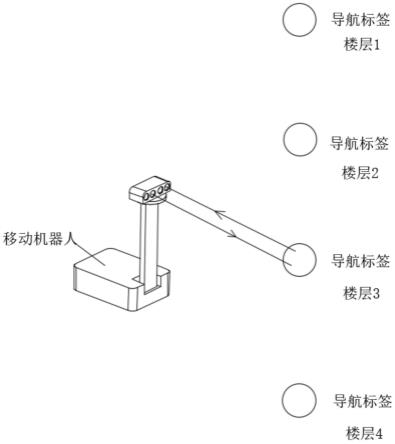
21.图1为本发明提出的一种基于图像识别的移动机器人楼层判断方法的移动机器人工作示意图;图2为本发明提出的一种基于图像识别的移动机器人楼层判断方法的步骤流程示意图。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
23.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
24.参照图1-2,一种基于图像识别的移动机器人楼层判断方法,包括移动机器人本体、驱动模块、主控系统、视觉导航系统和导航标签,主控系统和视觉导航系统均设置于移动机器人本体的内部,移动机器人本体的内部设置有双目识别模块,移动机器人本体的内部设置有slam导航系统,slam导航系统与主控系统通信连接。
25.双目视觉模块包括双目识别摄像机,双目识别摄像机用于采集环境信息,环境信息包括路况信息和障碍信息,双目识别摄像机的型号为uv100mg-20d-t,内置高速处理器以及先进的图像处理和分析算法(智能图象识别算法库,场景自适应算法)。
26.通过在移动机器人的表面设置有云台,且在云台的表面设置有双目识别摄像头,可以利用双目识别摄像头采集环境信息,从而快速获取室内的路况信息和障碍物信息,比起现有移动机器人普遍采用的红外距离传感方式,利用双目识别摄像机可以达到更高的识别精准度,从而有利于提高移动机器人的视觉导航效率。
27.主控系统分别与视觉导航系统和双目识别模块电性连接,导航标签为可以反射红外光线的标签贴纸,导航标签设置有若干个,且若干个导航标签粘贴在每个楼层的电梯间、大厅和过道的墙壁表面,视觉导航系统包括红外线发射器和红外线摄像机,主控系统还包括楼层分析模块,红外线发射器和红外线摄像机分别与主控系统通信连接。
28.红外线摄像头的具体型号为contour-m 近红外电视数字图像采集器,设计用来取
景,存储和记录通过红外光源发出的光线,例如砷化镓、红外发光二极管功能的相机,同时它也应用于红外显微或 红外发光 、记录检验、分辨性能、自补偿等范围。
29.移动机器人本体的表面设置有云台,云台可进行360度无死角旋转,红外线发射器、红外线摄像机和双目识别摄像机均设置在云台的表面。
30.移动机器人本体的内部设置有物联网模块,物联网模块通过无线网络与电梯的物联网控制器进行通信连接。
31.一种基于图像识别的移动机器人楼层判断方法,包括以下步骤:步骤一、移动机器人本体通过驱动模块进行移动,并利用红外线发射器发出红外光线,对大厅、过道或电梯间的墙壁进行发射扫描。
32.步骤二、导航标签反射由红外线发射器发出的红外光线,红外线摄像机接收经导航标签反射后的红外光线,红外线摄像机捕捉由导航标签上反射红外光线的区域所构成的图像信息。
33.步骤三、红外线摄像机根据接收到的红外光线绘制图像信息,红外线摄像机将图像信息传输给主控系统。
34.步骤四、主控系统将红外线摄像机拍摄的图像信息发送至楼层分析模块,由楼层分析模块对数据进行处理,并根据图像处理的后的数据运算得出楼层信息,同时主控系统指定新的导航线路。
35.步骤五、主控系统将导航线路传输给移动机器人的驱动模块,再由驱动模块驱使移动机器人本体进行移动,从而使移动机器人本体移动至楼层的电梯门位置。
36.通过在建筑物中的各个楼层电梯间、大厅和过道墙壁表面设置有若干个导航标签,且导航标签为可以反射红外线的标签贴纸,且再通过在移动机器人的的表面设置有红外线发射器和红外线摄像机,可以由红外线发射器向导航标签发射红外线,再由导航标签将红外线发射后被红外线摄像头捕获,从而通过视觉导航系统对导航标签的楼层信息进行识别,从而达到帮助移动机器人进行楼层判断和识别的目的,解决了现有移动机器人视觉识别楼层过程中受环境光反射等干扰因素,导致楼层判断难度大的问题,有助于提高移动机器人的工作效率。
37.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1