一种基于声发射信号的轴承故障检测系统及方法与流程
1.本发明属于设备故障检测技术领域,具体涉及一种基于声发射信号的轴承故障检测系统及方法。
背景技术:
2.球磨机和磁选机是磁铁矿选矿厂生产过程的关键设备。这两种设备结构复杂,一旦产生故障,不仅会影响生产,严重时可能造成设备损坏和停产,甚至对员工人身安全产生威胁。生产实践表明球磨机和磁选机的轴承是设备故障的主要来源之一,超过30%的旋转机械故障是由轴承故障引起的。由于当设备出现故障时,设备温升、噪声、振动可能会出现异常,目前智能设备主要包括非接触式温度测量、以及接触式的振动检测等,缺乏对于设备声发射信号的采集和分析手段。
3.声发射信号检测技术是一种动态的无损监测技术,在物体早期缺陷发展阶段激发的声发射信号就会被接收到。与传统检测分析方法相比,如振动分析、油样分析及漏磁等方法,声发射信号检测技术具有响应时间短、频带范围宽、传感器安装方便及信噪比高等特点。因此,在机械故障诊断研究领域中,声发射信号检测技术具有非常广阔的应用和发展前景。
4.随着人工智能领域的迅速发展,越来越多的研究人员将声发射信号检测技术与机器学习或深度学习算法结合提出智能化的故障诊断方法。针对现有接触式声发射信号检测方法及系统,本发明采用基于声发射信号的非接触检测方法及系统,增强了检测灵活性和安全性,对轴承早期发生的微弱性故障信息更加敏感。与现有lstm等模型的方法相比,本发明在充分利用样本的时序信息,保证极高的故障检测率的同时,简化了模型结构的复杂度和参数量,降低计算消耗。
技术实现要素:
5.针对设备轴承在线监测缺乏多维度故障诊断的问题,本发明的目的在于提供一种基于声发射信号的轴承故障检测系统及方法,通过研究设备运行中轴承的声发射信号特性,挖掘设备在各种运行工况下的状态特征,建立与声发射信号匹配的轴承故障检测方法,进行有效地状态预警。
6.本发明的目的是通过以下技术方案实现的:
7.本发明的一种基于声发射信号的轴承故障检测系统,其特征在于,所述的故障检测系统包括固定设置在球磨机和磁选机轴承侧旁的声发射信号采集装置、信号数据传输线缆、数据服务器、数据传输线缆、算法服务器、模型训练机、模型布署机和预警装置,
8.所述的数据服务器输入端与声发射信号采集装置通过信号数据传输线电性相连,输出端与所述的算法服务器的输入端通过数据传输线电性相连,算法服务器的输出端分别与模型训练机的输入端和模型布署机的输入端电性相连,模型布署机的输出端与预警装置电性相连;
9.本发明的一种基于声发射信号的轴承故障检测方法,采用权利要求1所述的检测系统,其特征在于,包括以下步骤:
10.a.声发射信号采集装置采集待测轴承的声发射信号并传输给数据服务器保存;
11.b.数据服务器中对采集的声发射信号进行小波阈值降噪处理;
12.c.数据服务器中将降噪后的声发射信号数据进行标准化处理;
13.d.数据服务器中建立滑动矩形窗函数对标准化处理后的声发射信号进行滑动数据增量处理,得到增量后的声发射信号数据样本;
14.e.数据服务器中将故障类型做为标签来标定该类型对应的声发射信号数据样本,构建数据集;
15.f.数据服务器中将数据集按比例划分为训练集、验证集和测试集;
16.g.算法服务器中建立轴承故障检测的深度神经网络模型;
17.h.模型训练机控算法服务器中深度神经网络模型进行训练,分别使用训练集训练模型,使用验证集验证模型效果,并指导模型的训练,使用测试集测试模型泛化能力;
18.i.将训练好的深度神经网络模型布署在模型布署机中;
19.j.轴承故障检测时,将通过上述步骤a、b、c得到标准化声发射信号,输入到模型布署机中的神经网络模型进行推理预测,当预测到某一故障状态对应的故障概率值大于预警阈值,则立刻进行预警;
20.优选地,在步骤b中,所述的对采集的声发射信号进行小波阈值降噪处理的过程为:先对原始声发射信号f(t)进行小波分解,得到各尺度的小波系数ω
j,k
;通过对小波系数ω
j,k
进行阈值处理得到处理后的小波系数进而对进行小波重构,就可以得到去噪后信号小波阈值的选取原则为固定式阈值原则:其中,l为信号长度,t为固定阈值;
21.优选地,在步骤d中,所述的对声发射信号进行滑动数据增量处理的方法为:通过建立滑动矩形窗函数对小波降噪和标准化处理后的声发射信号进行滑动截取实现;设置一个宽度为l的滑动矩形窗,其按照一定步长s,(s《l)从声发射信号的零时刻开始滑动截取滑动矩形窗宽度的样本序列,每一下段做为一个新的样本序列;舍弃最后一段长度不足滑动窗宽度的数据,即样本量向下取整;考虑到截取的相邻信号段间的信息连贯性,滑动矩形窗的滑动步长要小于滑动矩形窗的自身宽度;同时,为便于模型构建和训练以及考虑到计算硬件环境的特点,滑动矩形窗宽度一般选择为l=2a,每个声发射信号序列经过滑动数据增量处理后的样本总量为:
22.优选地,在步骤e中,数据服务器中将增量处理后的声发射信号数据做为样本,是将每种轴承故障对应的声发射信号经过步骤a、b、c、d依次处理得到的样本,与该轴承故障类型做为该样本的标签进行一一标定,从而建立数据集,
23.优选地,在步骤f中,数据服务器中将数据集按比例划分为训练集、验证集和测试集,是将数据集按样本总数,依照6:2:2的比例划分为训练集、验证集和测试集。
24.优选地,在步骤g中,所述的深度神经网络模型的结构主体由一维卷积网络、门控循环网络和多层感知机网络构成,深度神经网络模型输出维度为故障类别数n,最后经过
softmax层,获取每种故障类别的概率值,进而确定对应故障类别;
25.在所述的深度神经网络的一维卷积网络中,每层的激活函数均从sigmoid函数、tanh函数、relu函数和leakyrelu函数中选择一种即可,每个卷积层的卷积核大小为2,步长为1;为防止梯度爆炸或弥散并加训练速度,每一维卷积层后均引入一个batch normalization层;同时,每个一维卷积层后均引入dropout以防止过拟合问题的出现;
26.在所述的深度神经网络,除最后一个门控循环网络层外,其余每层门控循环网络的参数return_sequences设置为true。
27.在步骤g中,所述的深度神经网络模型的网络结构主体由一维卷积网络(conv1d)、门控循环网络(gru)和多层感知机网络构成,深度神经网络输出维度为故障类别数n,最后经过softmax层,获取每种故障类别的概率值,进而确定对应故障类别;
28.在所述的深度神经网络的一维卷积网络中,每层的激活函数均从sigmoid函数、tanh函数、relu函数和leakyrelu函数中选择一种,每个卷积层的卷积核大小为2和步长为1;为防止梯度爆炸或弥散并加训练速度,每一维卷积层后均引入一个批归一化batch normalization层;同时,每个一维卷积层后均引入随即丢弃dropout以防止过拟合问题的出现;
29.在所述的深度神经网络中,除最后一个门控循环网络gru层外,其他每层gru的参数return_sequences设置为true;
30.优选地,在步骤h中,在所述的利用深度神经网络模型进行训练时,网络的损失函数从交叉熵损失函数和均方误差损失函数中选择一种即可,优化器从adam、rmsprop、adagrad中选择一种即可。
31.在步骤h中,在所述的分别使用训练集训练模型、使用验证集验证模型效果、并指导模型的训练过程中,如果模型精确度难以满足目标需求,则将再增加轴承声发射信号的采集,并制作成训练样本加入到原来的训练集中,重新训练模型,直至模型效果在验证集上达到理想效果。
32.优选地,在步骤j中,在所述的模型布署机中布署的深度神经网络模型,其输入数据是在磨磁车间现场采集的球磨机和磁选机声发射信号做为原始信号,通过算法服务器进行小波阈值去噪和数据标准化处理后得到的数据;其输出是八类球磨机和磁选机轴承故障类型的故障概率,将概率值结果从大到小排序,选择故障概率最大的故障类型作为最终输出;如果输出的故障类型对应的故障概率大于阈值,立刻通过预警装置进行预警。与现有技术相比,本发明的优点是:
33.1)本发明采用基于声发射信号的非接触检测方法及系统,增强了检测灵活性和安全性,对轴承早期发生的微弱性故障信息更加敏感;另外,本发明在充分利用样本的时序信息,在保证极高的故障检测率的同时,针对轴承的声发射信号特点,简化了深度神经网络模型结构的复杂度和参数量,降低了计算开销。
34.2)本发明综合运用人工智能、物联传感、声学振动识别等先进技术,实现了球磨机和磁选机的信息感知、噪声数据分析、故障缺陷的智能判断。
35.3)本发明能够实现球磨机和磁选机轴承故障智能诊断分析,在不停电状态及时预警并及时通知运维人员进行快速处置,提升设备安全性能。
附图说明
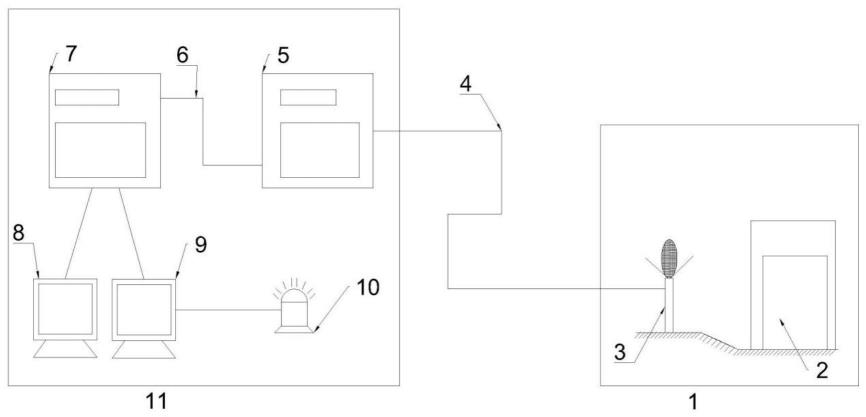
36.图1为本发明的轴承故障检测系统结构框图;
37.图2为本发明的轴承故障检测方法流程框图;
38.图3为本发明的小波阈值去噪的过程示意图;
39.图4为本发明的算法结构图;
40.图5为本发明具体实施例的深度神经网络结构框图。
41.图1中,1.磨磁车间现场,2.球磨机和磁选机,3.声发射信号采集装置,4.信号数据传输线,5.数据服务器,6.数据传输线,7.算法服务器,8.模型训练机,9.模型布署机,10.预警装置,11.后台服务系统机房。
具体实施方式
42.下面结合附图与具体实施方式对本发明作进一步说明。
43.实施例
44.如图1所示,本发明的一种基于声发射信号的轴承故障检测系统,其特征在于,所述的故障检测系统包括固定设置在磨磁车间现场1的球磨机和磁选机2轴承侧旁的声发射信号采集装置3、信号数据传输线4、数据服务器5、数据传输线6、算法服务器7、模型训练机8、模型布署机9和预警装置10,其中数据服务器5、数据传输线6、算法服务器7、模型训练机8、模型布署机9和预警装置10都设置在后台服务系统机房11内。
45.所述的数据服务器5输入端与声发射信号采集装置3通过信号数据传输线4电性相连,输出端与所述的算法服务器7的输入端通过数据传输线6电性相连,算法服务器7的输出端分别与模型训练机8的输入端和模型布署机9的输入端电性相连,模型布署机9的输出端与预警装置10电性相连;
46.如图2-图5所示,本发明的一种基于声发射信号的轴承故障检测方法,采用上述轴承故障检测系统,包括以下步骤:
47.步骤1:选取声发射信号采集点,在采集点的球磨机或者磁选机轴承侧旁处放置声信号采集装置3;
48.步骤2:声发射信号采集装置3分别采集设备正常工作时和轴承故障时的声发射信号,共采集了8种故障类型的轴承声发射信号,其中1种类型是正常工作时的声发射信号,设备正常工作时的状态类型做为一种特殊的故障类型——无故障,被包含在8种故障类型之中,其余7种为7类轴承故障时的声发射信号;每种类型的声发射信号以48khz的频率采集约860000个时间点的数据;将采集到的声发射信号数据传输到数据服务器5中并保存;
49.步骤3:在数据服务器中,对在步骤2中的轴承的声发射信号进行小波降噪处理;根据轴承震动所发出的声信号与噪声信号的小波系数在小波域分布的差异性,通过阈值函数对它们的系数进行处理以达到降噪目的;先对原始信号f(t)进行小波分解,公式如下:
[0050][0051]
其中满足被称为基本小波,s为尺度参数,对离散化数据处理时,s取值为2j,j∈z;小波分解以后得到各尺度的小波系数ω
j,k
,通过对小波系数ω
j,k
进行阈
值处理得到处理后的小波系数进而对进行小波重构,就可以得到去噪后信号重构公式如下:
[0052][0053]
其中小波阈值的选取原则为固定式阈值原则:
[0054][0055]
其中,l为信号长度,t为固定阈值;
[0056]
步骤4:对降噪后的声发射信号进行标准化处理,即归一化处理,以更利于后续对深度神经网络模型进行训练;
[0057]
在本实施例中,由于每类故障类型的声发射信号较少,所以有必要对声发射信号的数据进行滑动数据增量处理;在数据服务器中,建立窗宽度为1024的滑动矩形窗函数对标准化处理后的声发射信号进行数据增量处理,滑动步长设置为1024
×
80%,根据样本量计算公式可知,每种故障类型有1000个故障样本,每个样本特征维度为1024;
[0058]
步骤5:在数据服务器中,将8种故障类型做为标签,来标定其与对应的1000个故障样本;对每种故障类型均作此操作,标定好故障类型对应的样本,从而构建出包含8种故障类型的数据集;
[0059]
步骤6:在数据服务器中,按照6:2:2的比例将数据集划分为训练集、验证集和测试集;
[0060]
步骤7:在算法服务器7中,建立轴承故障检测的深度神经网络模型,本实施例构建的深度神经网络模型如图4所示;深度神经网络模型由一维卷积模块(conv1d)和门控循环网络模块(gru)组成。
[0061]
数据首先经过一层一维卷积层,卷积核数32个,卷积核大小为2和步长为1。为防止梯度爆炸或弥散并加快训练速度,卷积层后引入一个批归一化(batch normalization)层;为防止过度训练,bn层后引入随机丢弃(dropout),丢失率设置为0.5;激活函数选择线性整流(relu)函数;经过卷积层后,数据特征维度从1024
×
1变为1024
×
32;
[0062]
紧接着激活函数之后的是两层门控循环网络模块,第一层门控循环网络模块的参数units设置为32,return_sequences设置为true,即每个门控循环网络模块的输出均做为下一层门控循环网络模块的输入。第二层门控循环网络模块的参数units设置为8,return_sequences设置为false;
[0063]
数据最后经过一个归一化(softmax)层输出一个一维数组,数组有8个数值,分别对应8种故障类型的概率值,对该数组值进行由大到小的排序处理,同时记录8类故障的排序,那么处理后的数组中的第一个数值即为故障概率最大的类别对应的概率值,同时对应的故障类别即为模型预测的最终结果;
[0064]
步骤8:模型训练机8控制算法服务器7,利用训练集训练轴承故障检测的深度神经网络模型,本实施例中,训练的batch大小设置为128,损失函数采用交叉熵损失函数,优化器采用adam优化器,学习率设置为10-3
;
[0065]
步骤9:训练好模型以后,模型训练机8通过验证集验证深度神经网络模型效果,如
果效果不理想,重新训练深度神经网络模型;如果效果还是不理想,那么再次通过步骤2-7构建新的数据集,将新数据集与原来数据集合并,通过步骤6重新划分合并后的数据集,并且重新训练模型,重复此步骤,直至深度神经网络模型在验证集中的验证效果达到预期;
[0066]
步骤10:模型训练机8通过测试集测试通过步骤8得到的深度神经网络模型,以测试深度神经网络模型的泛化能力,泛化能力好的深度神经网络模型对轴承故障出现的微小变化更加敏感,能更好的实现设备故障检测的功能;
[0067]
步骤11:在模型布署机9中布署深度神经网络模型;
[0068]
通过图1所示实时采集轴承声发射信号,传输到数据服务器5进行步骤3、4处理,然后使用模型布署机9中的深度神经网络模型对处理后的声发射信号进行推理预测,得到当前球磨机和磁选机轴承的运行状态;如果检测到某一故障状态对应的故障概率值大于预警阈值,则立刻通过预警装置10进行预警。
[0069]
简而言之,本发明的一种基于声发射信号的轴承故障检测方法,其概略步骤如下:首先,采集装置定点采集球磨机和磁选机的声发射信号,发送到数据服务器;数据服务器对采集的声发射信号进行小波降噪处理;对数据进行标准化预处理操作并建立滑动矩形窗函数,对声发射时序信号进行数据增量处理;之后,将增量的数据作为样本,其对应的轴承故障类型做为该样本的标签,制作声发射信号数据集,再按照6:2:2的比例将声发射信号数据集划分为训练集、验证集和测试集;然后,算法服务器建立深度神经网络模型,分别利用训练集训练模型,验证集验证模型效果,测试集测试模型泛化能力;最后,将算法服务器训练好的深度神经网络模型布署在模型布署机上,进行轴承故障检测并预警。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1