孔径相关共聚焦显微测量系统及其三维重构方法与流程
1.本发明专利涉共聚焦显微测量领域,尤其是孔径相关共聚焦显微测量系统及其三维重构方法。
背景技术:
2.共聚焦显微系统是通过针孔限制照明范围,同时阻挡离焦光,以此实现单点的高对比度成像,通过逐点逐行的扫描可以得到全画幅的高清晰图像;该技术不易受离焦光干扰,使其拥有强大的光学切片能力,可以对厚物体进行三维成像,因此常被用于三维检测应用中,能对样品的表面形貌进行精密测量。
3.转盘共聚焦显微镜在上述原理基础上,通过在一个圆盘上设置复数针孔、狭缝或者各种掩膜图案达到相近的共焦效果,然后通过旋转圆盘实现对样品表面的多点或线扫描,以此实现快速的面成像,是在速度上特化的共聚焦类型;但是离焦光会从相邻孔径通过,造成孔径间串扰的问题。
4.而孔径相关共聚焦显微系统在保留转盘的快速扫描特点的同时,通过从复合图像中减去离焦干扰(为一定强度的宽场图像)的方式大大减小了孔径间串扰的影响;样品上任一点对共聚焦显微测量系统的轴向响应曲线大致成高斯分布,三维重构算法的核心就在于轴向响应曲线的拟合,曲线峰值即为该点的高度位置;
5.现有的高斯拟合算法有:
6.(1)转化为二阶多项式的最小二乘拟合方法,该方法速度快,但精度较差,易受噪声尤其是低值点处的噪声干扰;
7.(2)非线性高斯拟合方法,一般为lm算法,精度高,抗干扰能力强,但速度慢。
技术实现要素:
8.为了克服现有技术的不足,本发明提供了一种孔径相关共聚焦显微测量系统及其三维重构方法,通过科学的系统架构设计,能够实现相近的测量速度,对孔径相关的共聚焦显微镜获得图像进行数据拟合处理,采用三维重构算法,其基于加权最小二乘法及其迭代处理方法的高斯拟合,可以快速高精度地拟合得到样品表面点的高度位置,在保留转盘的快速扫描特点的同时,通过从复合图像中减去离焦干扰(即一定强度的宽场图像)的方式,大大减小了孔径间串扰的影响。
9.为解决上述技术问题,本发明提供孔径相关共聚焦显微测量系统及其三维重构方法,其中:
10.孔径相关共聚焦显微测量系统,包括:
11.光源、第一准直透镜、第一偏振片、偏振分光器、转盘、镜筒透镜、1/4波片、物镜、第二偏振片、成像透镜以及探测器;
12.所述第一准直透镜设置在所述光源下方,所述第一偏振片设置在所述第一准直透镜下方,所述偏振分光器设置在所述第一偏振片下方,所述转盘设置在所述偏振分光器下
方,所述镜筒透镜设置在所述转盘下方,所述1/4波片设置在所述镜筒透镜下方,所述物镜设置在所述1/4波片下方,所述物镜下方放置有样品;
13.作为一种举例说明,所述样品放置在位移台上。
14.所述第二偏振片设置在所述偏振分光器左侧,所述成像透镜设置在所述第二偏振片的左侧,所述探测器设置在所述成像透镜的左侧;并保证所述第二偏振片的光轴与所述第一偏振片的光轴正交;
15.所述光源用于发射照明光,照明光经所述准直透镜的准直后,通过第一偏振片,产生入射线偏振光;所述入射线偏振光在所述偏振分光器处透射,透射光被所述转盘调制,调制后的光线再次被所述镜筒透镜聚焦于物镜后焦面,期间照明光再通过所述1/4波片变为圆偏振光;所述圆偏振光再被物镜投射到样品上;
16.样品上产生的反射光沿着原路返回,在所述1/4波片处,变为与入射光振动方向正交的反射线偏振光,再经所述镜筒透镜聚焦到转盘上,通过所述转盘对所述反射线偏振光进行解调,解调后的光线再经偏振分光器产生向左的第二反射光;所述第二偏振片对第二反射光进一步过滤以除去杂光后经成像透镜汇聚到所述探测器的靶面上,得到样品显微图像。
17.进一步的,通过所述转盘的光调制作用,提高了显微镜的轴向分辨率,通过位移台移动样品可得到多个极薄的光学切片图像;随着物镜聚焦在样品表面的某一点上,该点的光强会急剧增强,离焦时亮度快速衰减到接近0的位置,所以样品表面的每一个点在轴向上成高斯分布;
18.进一步的,所述转盘有多个分区,可以分别采集共聚焦复合图像和宽场图像;在转动所述转盘扫描样品时,对同一焦面同时采集共聚焦复合图像和宽场图像,并进行图像计算可以去除孔径间串扰的影响,得到高对比度的纯共焦图像。
19.作为一种举例说明,所述共聚焦复合图像包括纯共焦图像和一部分宽场图像;
20.基于孔径相关共聚焦显微测量系统的三维重构方法,通过移动位移台z轴对样品各高度位置的显微图像进行采集,结合样品各高度位置的显微图像重建出样品表面的三维形貌,可对样品的微观三维特征进行测量,还能对样品表面缺陷进行检测,其处理过程包括:
21.s1:根据所测量的样品,设置系统的扫描间距和拟合度要求;
22.s2:采集样品112各高度下的共聚焦复合图像和宽场图像;
23.s3:创建图像堆栈,用于存放各个焦面的纯共焦图像信息;
24.创建高度位图,用于存放样品表面各点的高度位置信息;
25.s4:依次读取样品112各个高度位置的共聚焦复合图像和宽场图像
26.s5:通过共聚焦复合图像减去一定比例系数的宽场图像,以获得各个高度下的纯共焦图像,并将其存入对应位置的所述图像堆栈中;所述一定比例系数取决于光路系统中具体的转盘设计参数,以去除背景干扰为选取标准;
27.s6:所述图像堆栈中各图像同一位置的像素构成对应样品点的轴向响应曲线,对轴向响应曲线进行数据拟合,定位其峰值位置,并将峰值位置的信息存入所述高度位图的对应像素位置;
28.作为一种举例说明,所述峰值位置是指样品对应点的实际高度;
29.进一步的,所述数据拟合所采用的方法为基于加权最小二乘及其迭代处理方法的高斯拟合方法,包括:
30.为了实现样品轮廓的高精度测量,需要对样品的轴向响应曲线进行高斯拟合;高斯模型函数为:
[0031][0032]
其中,f(z)表示信号强度,a表示曲线高度,μ表示曲线中心轴(即最大值)的位置,σ为标准差,用来表示曲线宽度;
[0033]
已有的最小二乘高斯拟合将非线性高斯函数转换为线性二次线性函数后,再进行最小二乘线性拟合;对高斯函数两边取对数可得:
[0034][0035]
记lnf(z)=y;则有二次多项式
[0036]
y=az2+bz+c
ꢀꢀꢀ
公式(3)
[0037]
根据最小二乘原理,将某一点各光学切片上的坐标值(zi,yi)代入方程得平方差为:
[0038]v2
=∑(f(zi)-yi)2=∑(az
i2
+bzi+c-yi)2=min
ꢀꢀꢀ
公式4
[0039]
其中:zi指该光学切片在轴向的位置,yi指该点在该层的信号强度的自然对数;
[0040]
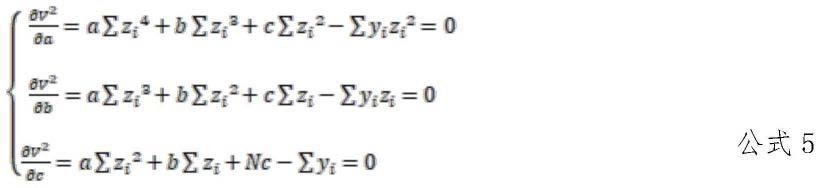
此时问题转化为多元函数求极值,对参数a、b、c分别求导
[0041][0042]
可将其转换为矩阵方程
[0043][0044][0045]
求解方程组可得a、b、c的值,由此可得
[0046][0047]
该方法将非线性拟合问题转换为线性拟合问题,拥有极快的拟合速度,但相应的抗噪声干扰能力较差;
[0048]
而实际使用场景中,考虑在系统有随机随机噪声的情况,测得的光强值不是真值
[0049]
[0050]
此时类似于公式4可得单点的误差平方差为
[0051][0052]
所以可计算的v2的期望值为
[0053][0054]
其中,σ
δ2
为噪声的标准差。从公式9可以看出,f(z)的值越小引入的误差越大。加权最小二乘法重新定义误差方程为:
[0055][0056]
因此
[0057]
e(v2)=f(z)2[az
i2
+bzi+c-ln f(z)]2+σ
δ2
ꢀꢀꢀ
公式11
[0058]
此时噪声不受f(z)值的影响,最小化了噪声干扰。公式6变为:
[0059][0060]
解出a、b、c的值代入公式7即可得到拟合结果;
[0061]
s7:计算拟合度并与预先设定的拟合度要求阈值对比,在大噪声条件下会出现不符合阈值要求的情况,此时引入其迭代处理方法,对不满足拟合度要求的拟合结果进行迭代处理操作;对满足拟合度要求的拟合结果输出像素高度。
[0062]
观测值即为第一次的预测值,不需要像非线性拟合算法一样对初始参数进行预测;
[0063]
对于第k(k>0)次迭代,有
[0064][0065]
其中:a
k-1
、b
k-1
、c
k-1
为前一次迭代的计算结果,f(z)k作为新的迭代预测值代入式(12)中的位置进行计算。每次迭代之后继续对比阈值,直到达到要求后输出;连续多次迭代拟合度不再改变或劣化则输出0值,表示无法测量;
[0066]
s8:逐个检测像素,是否完成像素高度输出,当所有像素完成高度输出时,即高度位图中所有像素填充完毕,输出高度位图;
[0067]
s9:将高度位图中各像素的灰度值作为z轴高度,对高度位图进行3d化,输出样品的三维轮廓图;所述灰度值即高度位置信息;
[0068]
本发明的有益效果:
[0069]
本发明针对孔径相关的共聚焦显微镜提出了一种三维重构算法,其基于加权最小二乘法及其迭代处理方法的高斯拟合,可以快速高精度地拟合得到样品表面点的高度位
置。
[0070]
本发明系统结构设计科学优化,易于实现,方便维护,适合推广。
附图说明
[0071]
图1是本发明孔径相关共聚焦显微测量系统之整体结构示意图。
[0072]
图2是本发明孔径相关共聚焦显微测量系统之三维重构方法的原理设计参考框图。
具体实施方式
[0073]
下面结合附图对本发明的优选实施例进行详细说明。
[0074]
参照图1所示,孔径相关共聚焦显微测量系统及其三维重构方法,其中:
[0075]
孔径相关共聚焦显微测量系统,包括:
[0076]
光源101、第一准直透镜102、第一偏振片103、偏振分光器104、转盘105、镜筒透镜106、1/4波片107、物镜108、第二偏振片109、成像透镜110以及探测器111;
[0077]
所述第一准直透镜102设置在所述光源101下方,所述第一偏振片103设置在所述第一准直透镜102下方,所述偏振分光器104设置在所述第一偏振片103下方,所述转盘105设置在所述偏振分光器104下方,所述镜筒透镜106设置在所述转盘105下方,所述1/4波片107设置在所述镜筒透镜106下方,所述物镜108设置在所述1/4波片107下方,所述物镜108下方放置有样品112;
[0078]
作为一种举例说明,所述样品112放置在位移台上。
[0079]
所述第二偏振片109设置在所述偏振分光器104左侧,所述成像透镜110设置在所述第二偏振片109的左侧,所述探测器111设置在所述成像透镜110的左侧;并保证所述第二偏振片109的光轴与所述第一偏振片103的光轴正交;
[0080]
所述光源101用于发射照明光,照明光经所述准直透镜102的准直后,通过第一偏振片103,产生入射线偏振光;所述入射线偏振光在所述偏振分光器104处透射,透射光被所述转盘105调制,调制后的光线再次被所述镜筒透镜106聚焦于物镜108后焦面,期间照明光再通过所述1/4波片107变为圆偏振光;所述圆偏振光再被物镜108投射到样品112上;
[0081]
样品112上产生的反射光沿着原路返回,在所述1/4波片107处,变为与入射光振动方向正交的反射线偏振光,再经所述镜筒透镜106聚焦到转盘105上,通过所述转盘105对所述反射线偏振光进行解调,解调后的光线再经偏振分光器104产生向左的第二反射光;所述第二偏振片109对第二反射光进一步过滤以除去杂光后经成像透镜110汇聚到所述探测器111的靶面上,得到样品显微图像。
[0082]
进一步的,通过所述转盘105的光调制作用,提高了显微镜的轴向分辨率,通过位移台移动样品112可得到多个极薄的光学切片图像;随着物镜108聚焦在样品112表面的某一点上,该点的光强会急剧增强,离焦时亮度快速衰减到接近0的位置,所以样品112表面的每一个点在轴向上成高斯分布;
[0083]
进一步的,所述转盘105有多个分区,可以分别采集共聚焦复合图像和宽场图像;在转动所述转盘105扫描样品112时,对同一焦面同时采集共聚焦复合图像和宽场图像,并进行图像计算可以去除孔径间串扰的影响,得到高对比度的纯共焦图像。
[0084]
作为一种举例说明,所述共聚焦复合图像包括纯共焦图像和一部分宽场图像;
[0085]
参照图2所示,基于孔径相关共聚焦显微测量系统的三维重构方法,通过移动位移台z轴对样品各高度位置的显微图像进行采集,结合样品各高度位置的显微图像重建出样品表面的三维形貌,可对样品的微观三维特征进行测量,还能对样品表面缺陷进行检测,其处理过程包括:
[0086]
s1:根据所测量的样品,设置系统的扫描间距和拟合度要求;
[0087]
s2:采集样品112各高度下的共聚焦复合图像和宽场图像;
[0088]
s3:创建图像堆栈,用于存放各个焦面的纯共焦图像信息;
[0089]
创建高度位图,用于存放样品表面各点的高度位置信息;
[0090]
s4:依次读取样品112各个高度位置的共聚焦复合图像和宽场图像
[0091]
s5:通过共聚焦复合图像减去一定比例系数的宽场图像,以获得各个高度下的纯共焦图像,并将其存入对应位置的所述图像堆栈中;所述一定比例系数取决于光路系统中具体的转盘设计参数,以去除背景干扰为选取标准;
[0092]
作为一种举例说明,当所述转盘上的条纹,其通光孔径为40μm、孔径间隔为120μm时,所述一定比例系数取值:0.3。
[0093]
s6:所述图像堆栈中各图像同一位置的像素构成对应样品点的轴向响应曲线,对轴向响应曲线进行数据拟合,定位其峰值位置,并将峰值位置的信息存入所述高度位图的对应像素位置;
[0094]
作为一种举例说明,所述峰值位置是指样品对应点的实际高度;
[0095]
进一步的,所述数据拟合所采用的方法为基于加权最小二乘及其迭代处理方法的高斯拟合方法,包括:
[0096]
为了实现样品轮廓的高精度测量,需要对样品的轴向响应曲线进行高斯拟合;高斯模型函数为:
[0097][0098]
其中,f(z)表示信号强度,a表示曲线高度,μ表示曲线中心轴(即最大值)的位置,σ为标准差,用来表示曲线宽度;
[0099]
已有的最小二乘高斯拟合将非线性高斯函数转换为线性二次线性函数后,再进行最小二乘线性拟合;对高斯函数两边取对数可得:
[0100][0101]
记lnf(z)=y;则有二次多项式
[0102]
y=az2+bz+c
ꢀꢀꢀ
公式(3)
[0103]
根据最小二乘原理,将某一点各光学切片上的坐标值(zi,yi)代入方程得平方差为:
[0104]v2
=∑(f(zi)-yi)2=∑(az
i2
+bzi+c-yi)2=min
ꢀꢀꢀ
公式4
[0105]
其中:zi指该光学切片在轴向的位置,yi指该点在该层的信号强度的自然对数;
[0106]
此时问题转化为多元函数求极值,对参数a、b、c分别求导
[0107][0108]
可将其转换为矩阵方程
[0109][0110]
求解方程组可得a、b、c的值,由此可得
[0111][0112]
该方法将非线性拟合问题转换为线性拟合问题,拥有极快的拟合速度,但相应的抗噪声干扰能力较差;
[0113]
而实际使用场景中,考虑在系统有随机随机噪声的情况,测得的光强值不是真值
[0114][0115]
此时类似于公式4可得单点的误差平方差为
[0116][0117]
所以可计算的v2的期望值为
[0118][0119]
其中,σ
δ2
为噪声的标准差。从公式9可以看出,f(z)的值越小引入的误差越大。加权最小二乘法重新定义误差方程为:
[0120][0121]
因此
[0122]
e(v2)=f(z)2[az
i2
+bzi+c-ln f(z)]2+σ
δ2
公式11此时噪声不受f(z)值的影响,最小化了噪声干扰。公式6变为:
[0123]
[0124]
解出a、b、c的值代入公式7即可得到拟合结果;
[0125]
s7:计算拟合度并与预先设定的拟合度要求阈值对比,在大噪声条件下会出现不符合阈值要求的情况,此时引入其迭代处理方法,对不满足拟合度要求的拟合结果进行迭代处理方法操作;对满足拟合度要求的拟合结果输出像素高度。
[0126]
观测值即为第一次的预测值,不需要像非线性拟合算法一样对初始参数进行预测;
[0127]
对于第k(k>o)次迭代,有
[0128][0129]
其中:a
k-1
、b
k-1
、c
k-1
为前一次迭代的计算结果,f(z)k作为新的迭代预测值代入式(12)中的位置进行计算。每次迭代之后继续对比阈值,直到达到要求后输出;连续多次迭代拟合度不再改变或劣化则输出0值,表示无法测量;
[0130]
s8:逐个检测像素,是否完成像素高度输出,当所有像素完成高度输出时,即高度位图中所有像素填充完毕,输出高度位图;
[0131]
s9:将高度位图中各像素的灰度值作为z轴高度,对高度位图进行3d化,输出样品的三维轮廓图;所述灰度值即高度位置信息;
[0132]
本发明针对孔径相关的共聚焦显微镜提出了一种三维重构算法,其基于加权最小二乘法及其迭代处理方法的高斯拟合,可以快速高精度地拟合得到样品表面点的高度位置;本发明系统结构设计科学优化,易于实现,方便维护,适合推广。
[0133]
以上所述的仅为本发明的优选实施例,所应理解的是,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想,并不用于限定本发明的保护范围,凡在本发明的思想和原则之内所做的任何修改、等同替换等等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1