一种基于5G与北斗及GNSS的无人机激光雷达测量系统的制作方法
一种基于5g与北斗及gnss的无人机激光雷达测量系统
技术领域
1.本发明属于激光雷达技术领域,更具体地说,特别涉及一种基于 5g与北斗及gnss的无人机激光雷达测量系统。
背景技术:
2.激光雷达测量是一种已迅速发展成为热点的主动光学遥感技术,为获取空间三维数据提供了重要手段,适用于目标探测、对地观测、城市建筑物三维建模、以及交通线路、电力线路、油气管道的勘察与规划等。激光雷达测量系统包括激光测距单元、位置姿态测量单元和主控制单元。它是由激光测距单元测得距离信息,再联合激光测距时刻位置姿态测量单元获取的位置和姿态信息解算出探测目标精确的三维坐标,从而实现三维成像。这三个单元在常规激光雷达测量系统中互相分离,每次使用需要进行组装、拆卸,每拆一次会引起参数发生改变,若希望采集到高精度的数据,在使用前需要重新检校。这种采用分立单元组合的方式不仅影响了使用效率,而且也导致整个激光雷达测量系统体积和重量增加,难以做到轻型化和小型化。
3.在现有激光雷达测量系统中,测量光束偏转角多采用间接测量方式,即通过对扫描机构的机械面测量,计算得到光束的偏转角,利用该间接得到的偏转角进行运算得到目标物体的目标参数。但是,间接测量方式精度或分辨率不足,且不容易做到激光脉冲和位置反馈的精确时间同步,从而带来较大的位置测量误差。于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种基于5g与北斗及gnss 的无人机激光雷达测量系统,以期达到更具有更加实用价值性的目的。
技术实现要素:
4.为了解决上述技术问题,本发明提供一种基于5g与北斗及gnss 的无人机激光雷达测量系统,由以下具体技术手段所达成:
5.一种基于5g与北斗及gnss的无人机激光雷达测量系统,包括激光雷达测量模块、基于北斗及gnss导航的组合惯导模块、5g通讯模块和时间同步器;
6.所述激光雷达测量模块用于支持与主机或其他传感器的时钟同步,且同步的精度为毫秒级,通过北斗导航系统从卫星获得高精度的时钟信号,来作为整个系统的时钟源,将秒脉冲信号pps和包含年月日时分秒信息的nmea指令组合实现对激光雷达或主机的毫秒级时钟同步;
7.所述基于北斗及gnss导航的组合惯导模块用于将北斗全球定位系统与ins惯性导航系统相结合,以提高导航系统的整体精度;
8.所述5g通讯模块为支持5g sa/nsa组网,向下兼容4g/3g/2g 的网络制式;
9.所述时间同步器为控制器开发套件,将激光雷达测量模块和基于北斗及gnss导航的组合惯导模块进行时间同步处理,使用时间同步主控器将惯导系统的时间数据和同步信号秒脉冲pps同步到激光雷达测量系统中,让激光雷达点云中的每个点都具有时间信息。
10.进一步的,激光雷达测量模块采用无人飞行器搭载,其由无人飞行器、遥控器及配套使用的软件组成。
11.进一步的,基于北斗及gnss导航的组合惯导模块包括单个oem 模块和北斗及gnss伪距测量专用的高精度多重相关器。
12.进一步的,oem模块包含测量级的多频北斗及gnss接收机及mems惯导器件,所述北斗及gnss伪距测量专用的高精度多重相关器可采集未滤波、未平滑的伪矩测量数据和极低的l1和l2载波相位观测值噪声。
13.进一步的,5g通讯模块在接受到数据后,可通过5g天线即可将数据传输至云端服务器,所述云端服务器为一个动态域名解析软件。
14.进一步的,时间同步器为基于时间同步主控器支持ubuntu 18.04 的时间同步主控器,提供完整的桌面linux环境,时间同步器还包括本机安装流行的功能开源机器学习框架以及计算机视觉和机器人开发的框架。
15.进一步的,时间同步器支持三种同步方式,分别为ptp:ieee 1588v2.0 ptp网络协议同步、北斗导航系统同步和pps脉冲同步,且同步优先级:依次为ptp、北斗和pps。
16.与现有技术相比,本发明具有如下有益效果:
17.本发明利用惯性导航系统短时间内可以不依赖外部独立工作的特点,将北斗全球定位系统与ins惯性导航系统相结合,可在地界空旷、搜星情况良好、卫星信号较强的环境下,主要依赖北斗全球定位系统进行导航工作,惯性导航系统做辅助导航,并根据北斗导航系统提供精确位置信息不断更新惯性导航系统的初值,使惯导系统的误差累积做到最小;在植被覆盖多、楼房密集、难以捕捉足够数量的解算卫星时,可以依靠惯导系统独立工作、不依赖接发外部信号的特点继续为载体提供导航服务,直到北斗系统搜星、信号正常。因而这种北斗/ins的联合导航不仅提高了导航系统的整体精度,也加强了导航系统的稳定性和可靠性。
附图说明
18.图1是本发明ptp同步方式示意图。
19.图2是本发明ptp配置示意图。
20.图3是本发明程序运行界面示意图。
21.图4是本发明程序运行结果截图示意图。
22.图5是本发明utc时序图。
23.图6是本发明$gprmc时序图。
24.图7是本发明$gprmc参数。
25.图8是本发明utc时间戳格式。
26.图9是本发明硬件连接过程图。
27.图10是本发明点云数据包。
28.图11是本发明pps同步时序图。
29.图12是本发明系统集成流程图。
30.图13是本发明实验流程图。
31.图14是本发明试飞地点图。
具体实施方式
32.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
33.实施例1
34.本发明提供一种基于5g与北斗及gnss的无人机激光雷达测量系统,包括激光雷达测量模块、基于北斗及gnss导航的组合惯导模块、5g通讯模块、时间同步器。
35.其中,机载激光雷达测量模块,可探测远至260米的物体。其拥有独特的非重复采样策略,能够精确探测视场中每个细节,而且机身小巧精致,可轻松嵌入各种平台。探测范围可达260米,点云数据率为100,000点/秒,角度精度小于0.05
°
,具有38.4
°
的圆形视场角。
36.其中,激光雷达同步方式,用于自动驾驶的激光雷达必须支持与主机或其他传感器的时钟同步,同步精度通常要达到毫秒级。常见的同步技术有两种,一种是基于北斗的“pps+nmea”,另一种是基于以太网的ieee 1588时钟同步协议。本系统使用北斗导航系统来取代北斗。
37.通过北斗导航系统从卫星获得高精度的时钟信号,来作为整个系统的时钟源。常规的导航单元都支持输出精确到毫秒的秒脉冲信号 pps和包含年月日时分秒信息的nmea指令,通过pps和nmea的组合就能够实现对激光雷达或主机的毫秒级时钟同步。只要激光雷达支持基于rs232接口的pps+nmea时钟同步输入信号,就可以实现毫秒级的时钟同步。pps+nmea的优点是协议简单,容易实现;缺点是必须基于rs232,多个设备之间实现同步比较困难。ieee 1588 就成了最好的选择,1588是基于以太网的高精度时钟同步协议,能够实现以太网中多个从节点(各种传感器)与主节点(主机)之间的亚微秒级时钟同步,前提是所有节点之间都通过以太网互联,并且每个节点都支持1588协议。如果激光雷达支持1588协议,就可以使用如下的架构实现时钟同步:主机通过pps+nmea实现与北斗导航系统的时钟同步;激光雷达等其他节点通过1588协议实现与主机的时钟同步;
38.激光雷达输出的点云中,每个点除了(x,y,z)坐标之外,还有一个重要的字段就是时间戳。相对于相机,激光雷达是一个慢速扫描设备,每一帧点云中的不同点的时间戳是不一样的,以每秒10帧的激光雷达为例,每帧点云耗时100毫秒,每帧点云中的第一个点和最后一个点之间相差约100毫秒。扫描高速运动的物体时,原始点云是“变形”的,类似于相机的快门速度太慢时拍摄的运动物体都是模糊和拉长的一样,必须利用点云中的时间戳对点云进行校正才能恢复被扫描物体的本来面貌。激光雷达与主机或北斗导航系统实现高精度的时钟同步之后,就会基于这个时钟为每个激光点生成一个时间戳,有了这个时间戳很多工作开展起来就方便多了,例如多传感器的融合等等。用户和雷达之间有两种通信方式,且这两种通信的数据协议格式是不相同的。不同点和相应功能如下:控制指令数据:配置和查询雷达的参数和状态信息。采样数据:采样数据由雷达产生,包括点云数据和imu 数据(mid40/100/70不支持);目前,两种协议都被封装在udp的数据段中,且协议数据为小端序。
39.其中,本测量系统采用无人飞行器来进行搭载,其由飞行器、遥控器及配套使用的软件组成,配备定制的三余度冗余飞控系统,具备多重安全保障以及先进的智能飞行功能。快拆式起落架和已预装至中心架的可折叠机臂方便收纳及运输,且有效缩短起飞前的准备时间。最大起飞重量达15.5kg,可搭载5g通讯系统、雷达、惯导等多种测量系统,满足测量使用需要。
40.其中,基于北斗及gnss导航的组合惯导系统,惯性导航系统 (ins)是一种不依赖于接发外部信号,靠自身内部机械运动而自主工作的导航系统。它以牛顿力学理论为基础,通过内部设备测量运动载体在其惯性系下的加速度对时间积分,经过坐标转换使其变换到导航坐标系中,进而获得该载体在导航坐标系中的速度、姿态角度和加速度等信息。
41.由于惯性导航系统属于推算式的导航方式,他从最初的已知点上通过计算分析获取的速度、运行姿态角和加速度去推算下一导航点的坐标位置,进而可以获得连续的导航信息。系统中的一个重要部分就是陀螺仪,它用来测量系统的载体在惯导坐标系下的角速度,计算出相对于导航坐标系的偏移角度以此作为坐标转换中的角度参数矩阵,经过最终计算获得相应的导航参数。惯导系统中另一个重要的部分就是加速度计。在惯导运行时,沿设定惯导参考系的每一个轴线方向上都有一个加速度计。当载体运行时,可以根据每一个轴向上加速度计所记录的数值推算出载体在该方向上的速度,进而获得载体在该方向上的位移,最终推算出载体运动后的空间位置和运动姿态,完成导航工作。
42.由于惯性导航系统特有的工作原理,它可以不依靠任何外部接发信号而独立工作,因而在很多特殊的工作环境中,如水下、地下和空中等独立完成导航定位工作。不仅能提供载体的空间位置信息,而且还能记录导航过程中载体的速度、姿态和加速度等信息。不过在前文中已经提到过,惯性导航系统属于推算式的导航系统,它是在一个已知点的基础上通过传感器采集到的信息去推算下一导航点的位置,在一个较短的时间周期内它可以依靠自身高精度的传感器去完成导航工作。但是由于传感器运行时不可避免的会有误差存在,工作时间越长,误差累计越大,因而惯性导航系统只能在较短时间内提供一个较为精确的导航依据。
43.为了克服惯性导航系统的这个先天不足,同时又能利用惯性导航系统短时间内可以不依赖外部独立工作的特点,我们将北斗全球定位系统与ins惯性导航系统相结合。这样,在地界空旷、搜星情况良好、卫星信号较强的环境下我们就可以主要依赖北斗全球定位系统进行导航工作,惯性导航系统做辅助导航,并根据北斗导航系统提供精确位置信息不断更新惯性导航系统的初值,使惯导系统的误差累积做到最小。而在植被覆盖多、楼房密集、难以捕捉足够数量的解算卫星时,我们可以依靠惯导系统独立工作、不依赖接发外部信号的特点继续为载体提供导航服务,直到北斗系统搜星、信号正常。因而这种北斗/ins 的联合导航不仅提高了导航系统的整体精度,也加强了导航系统的稳定性和可靠性。
44.本系统具有如下特征:使用北斗/ins的联合导航,提出高性能的直接定位定向解决方案,适用于小型无人机系统,能提高测图精度及效率,减小/消除地面控制点(gcp’s),减少旁向重叠,进行精确的 lidar数据定位;具有紧凑的单个oem模块,包含了测量级的多频北斗及gnss接收机及mems惯导器件;采用了applanixin-fusiontm紧耦合北斗及gnss-惯导处理算法,以及 smartcaltmimu校验技术,解算位置及姿态数据;包含pospacuav差分北斗及gnss/惯导软件,能够提供最高精度的后处理解算;能提供高精度的rtk实时处理,可用于降落应用,并可提供高精度的实时姿态定向。
45.系统包括先进的applanix in-fusion tm组合导航集成技术,配备了坚固、性能稳定mems imu,具备applanix smartcaltm校正技术和先进的trimble6custom北斗及gnss技术(双芯片),每个芯片包含220个通道,可以支持如下频段:
46.北斗:l1 c/a,l2c,l2e,l5
47.glonass:l1c/a,l2c/a,l2p,l3cdma8
48.beidou:b1,b2
49.galileo1:l1boc,e5a,e5b,e5altboc
50.qzss:l1c/a,l1saif,l2c,l5
51.sbas:l1c/a,l5
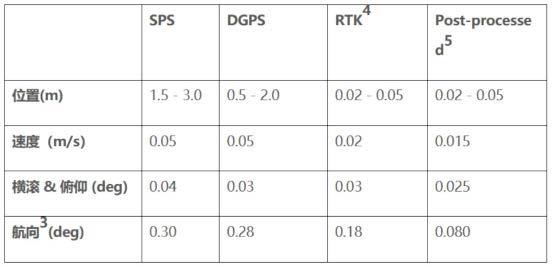
52.系统包含北斗及gnss伪距测量专用的高精度多重相关器,可采集未滤波、未平滑的伪矩测量数据(为了低噪声、低多路径误差、低时域相关性和高动态响应)和极低的l1和l2载波相位观测值噪声,每赫兹带宽小于1毫米的精度;系统采用经过证实的trimble低仰角卫星跟踪技术,能以100hz实时输出位置数据与姿态数据,支持通用云台和飞控,可以输出200hz的imu数据;导航数据输出格式为ascii(nmea-0183),binary(trimblegsof),支持参考输入格式包含cmr,cmr+,scmrx,rtcm2.1,2.2,2.3,3.0,3.1,支持pospacuav后处理软件(包含),无出口许可要求。支持所有以太网功能,通过专用ip地址(静态或dns)输入/输出。系统包含rs232串口和ttl串口,内部记录为6gb闪存,外置记录为usb2.0接口。部分性能指标如下表:
[0053][0054]
接下来介绍控制软件和配置。对它的控制和配置是通过支持所有常见浏览器的web服务器进行的。首先连接web浏览器,预先配置为静态ip地址192.168.53.100和子网掩码255.255.255.0,在浏览器的地址行上输入ip地址http://172.16.20.106,输入用户名和密码,连接后,屏幕上将显示产品、系统名称、序列号和固件版本。
[0055]
菜单列表中的每个项都包括相关的子菜单,这些子菜单可以通过鼠标单击访问。主菜单可以分为四个基本类别:1.状态、解决方案监视和显示:接收器状态、卫星、网络服务;2.数据记录和配置:数据记录、接收器配置、i/o配置、网络配置、安全;3.固件升级菜单。
[0056]
关于接收器状态,解决方案监视和显示:状态-身份菜单提供快速预览,包括序列号、ip地址以及软硬件版本。系统名称在用户控制下,可以使用系统名称输入框和应用ok按钮随时更改。在多个板的情况下,建立用户命名约定是非常有用的。
[0057]
卫星和web服务菜单提供了一个丰富的用户界面,用于监测实时解决方案状态、当前卫星覆盖范围、位置和姿态图,以及与谷歌地球的直接接口。
[0058]
关于数据记录方面,在pospac无人机或pospacmms中进行后处理所需的原始数据可以记录到内部内存或外部usb设备。外部usb设备需要由用户通过usb端口集成。数据被记录到具有扩展名t04的专有文件格式。
[0059]
一旦无人机和天线安装在无人机上,必须输入板相对于车辆和北斗及gnss天线的相对位置和方向。其需要测量两种类型:1.杠杆臂-矢量位移之间的两个身体框架;2.安装
tensorflow,pytorch,caffe,keras和mxnet,以及计算机视觉和机器人开发的框架,如opencv和ros。完全兼容这些框架和nvidia 领先的ai平台,可以比以往更轻松地将基于ai的推理工作负载部署到时间同步器。时间同步主控器为各种复杂的深度神经网络(dnn) 模型提供实时计算机视觉和推理。这些功能支持多传感器自主机器人,具有智能边缘分析的物联网设备和先进的ai系统。甚至转移学习也可以使用ml框架在时间同步主控器上本地重新训练网络。
[0066]
时间同步器围绕一个系统级模块(som)构建,包含处理器,存储器和电源管理电路。时间同步主控器计算模块尺寸为45x70mm。
[0067]
其中,时间同步方式,雷达系统支持三种同步方式:(1)ptp: ieee 1588v2.0 ptp网络协议同步;(2)北斗导航系统同步:为了实现北斗导航系统同步,雷达/hub需要同时接收pps和utc时间戳。可以通过rs485串口在$gprmc信息中获得utc时间戳;(3) pps:脉冲同步(只有雷达支持)。
[0068]
同步优先级:ptp》北斗》pps,当系统中有多个同步源存在时,选择最高优先级的同步模式。当最高优先级同步源离线时,同步类型将会持续而不会回退到低优先级,并且状态码中的time_sync_status 将会被设置为4(最高优先级同步标志异常),每个数据包中包含着指明数据包中第一个点云时间的时间戳。数据包中每个点的时间间隔是相等的。以mid-40为例,采用频率为100khz,因此每个点云的的时间间隔为10us。时间戳类型如下表所示:
[0069]
时间戳类型同步源类型数据格式说明0no sync source无同步源uint64_tunit单位:ns1ptpuint64_tunit单位:ns2保留
ꢀꢀ
3北斗utcutc4ppsint64_t单位:ns,只有雷达支持
[0070]
时间戳类型0:当系统中没有同步信号时,时间戳表明系统上电时间(上电时为0ns,t1表示当前帧的第一个点云数据距离上电时间的纳秒数)。
[0071]
ptp同步(时间戳类型1):ieee 1588v2.0ptpnetwork protocolsynchronization网络协议同步1588网络同步模式具有最高优先级,如图1所示。
[0072]
配置ptp过程如图2所示,若查询出硬件时间戳,则可进行ptp 时间同步,利用指令开启ptp4l的master时钟功能,再通过抓包软件 wireshark,选定eth0网卡。如果网络中出现sync message数据,说明ptp4l程序的master时钟功能正常运行,如图3所示,通过指令即可通过ptp4l实现雷达时间和pc本地系统时间的同步,如图4所示。
[0073]
北斗时间同步原理(时间戳类型3):时间戳类型3表明雷达/hub 利用北斗实现同步。对于雷达单元,rs485电平中的pps和sdk控制指令中的utc时间时间戳均需要,utc时序图如图5所示;对于 hub,需要rs485中的pps和$gprmc信息,时序图如图6所示;
[0074]
$gprmc信息的样例如下:
[0075]
$gprmc,123519,a,4807.038,n,01131.000,e,022.4,084.4,230394,0 03.1,w*6a,参数如图7所示;点云数据包中utc时间戳格式为图 8;硬件连接过程为:将北斗模块的时间信号(gprmc)通过ttl 转usb模块接入pc,pps信号接入lidar转接盒同步口(sync port),如图9所示;
[0076]
软件配置过程为:由于需要pc接收gprmc数据,$gprmc 信息的样例如下:
[0077]
$gprmc,123519,a,4807.038,n,01131.000,e,022.4, 084.4,230394,003.1,w*6a
[0078]
然后通过sdk协议发送给lidar。
[0079]
查看viewer软件,即查看到pps的信号状态,达成pps信号同步。
[0080]
采集到的点云数据包图10;如图第一行则说明一帧有2662个点,第二行则是该帧的所在时间,第三行开始有x,y,z三轴的点坐标以及反射率。
[0081]
pps同步(时间戳类型4):pps同步源使用rs485电平信号,时序图如图1,pps的上升沿将会把时间戳复位为0,所以点云数据的时间戳表明了点云采样和pps上升沿的间隔。在imu数据包中,由于补偿延迟,时间偏移可能为负。如图11所示。
[0082]
实施例2
[0083]
基于5g与北斗及gnss的无人机激光雷达测量系统集成与检验,将北斗及gnss天线安装在激光雷达上,连接北斗导航系统和惯性导航系统,将时间信号传输到连接的时间同步器时间同步主控器中,经过处理输出到激光雷达测量系统里,雷达即可输出回带有时间信号的点云数据;时间同步器接受返还的数据,将数据输出到5g通讯模块,通过5g天线输出到远程终端。流程图如图12所示。
[0084]
实施例3
[0085]
机载激光雷达测量系统集成,将北斗天线安装在无人机顶部,连接北斗导航系统和惯性导航系统,按照设定好的激光雷达时间同步方式,将时间信号传输到连接的时间同步器时间同步主控器中,经过处理输出到激光雷达测量系统里,雷达即可输出回带有时间信号的点云数据;时间同步器接受返还的数据,将数据输出到5g通讯模块,通过5g天线输出到远程终端。将设计好的移动激光雷达测量系统搭载到无人机平台上。
[0086]
实施例4
[0087]
试验,本次试验流程图如图13所示。本次测试在杭州市富阳区某开阔平地上进行,地点如图14所示,当日天气晴朗,地面宽阔,周围无高大建筑物,视线良好,北斗信号强,无禁飞区域限制,可安全飞行。
[0088]
飞行前,首先对飞行器进行检查:1.确保所有固件均为最新。2. 遥控器、智能飞行电池以及移动设备电量充足。3.机臂和螺旋桨均已展开。4.北斗-compass pro均已展开,模块上的箭头均指向飞行器机头方向。5.所有线材连接正确及牢固。6.app正常运行。7.开机后电机正常启动。
[0089]
接下来进行指南针校准。1.进入go app“相机”界面,点击上方的飞行器状态提示栏,选择“指南针校准”。飞行器状态指示灯黄灯常亮代表指南针校准程序启动。2.水平旋转飞行器360
°
,飞行器状态指示灯绿常亮。3.使飞行器机头朝下,水平旋转360
°
。4.完成校准。若飞行器状态指示灯显示红灯闪烁,表示校准失败,重新进行以上各步骤。飞行器起飞界面上将会出现指南针校准的提示,成功校准后该提示将会消失。指南针校准成功后,将飞行器放回地面时,如果再次提示需要校准,将飞行器转移至其他的位置放置。若出现下列情况之一:1.指南针数据异常,飞行器状态指示灯显示红黄灯交替闪烁。2.飞行场地与上一次指南针校准的场地相距较远。3.飞行器机械结构有变化。4.飞行时漂移比较严重,或者不能直线飞行。需要重新校准。
[0090]
完成校准操作后,即可进行起飞操作。飞行模式分为两种,自动飞行和手动飞行。
自动起飞操作流程为:1.打开go app,进入“相机”界面。2.确定飞行模式已切换至“p”模式。3.根据界面提示,进行飞行前检查。4.点击向上按钮,确认安全起飞条件,向右滑动按钮确定起飞。5.飞行器将自动起飞,在离地面1.2米处悬停,并升起起落架。手动起飞则只需要使用遥控器进行“内八”掰杆动作,启动电机,将油门杆推起,飞机即可飞行。
[0091]
飞机起飞后,基础飞行操作为:1.把飞行器放置在平整开阔地面上,面朝机尾。2.开启遥控器和智能飞行电池。3.运行go app,连接移动设备,进入“相机”界面。4.等待飞行器状态指示灯绿灯闪烁,进入可安全飞行(北斗)状态。执行掰杆动作,启动电机。5.往上缓慢推动油门杆,让飞行器平稳起飞。飞行器首次达到1.2米高度时起落架将会自动升起。6.需要下降时,先向下拨动起落架控制开关放下起落架。缓慢下拉油门杆,使飞行器缓慢下降于平整地面。7.落地后,将油门杆拉到最低的位置并保持3秒以上直至电机停止。8.停机后依次关闭飞行器和遥控器电源。
[0092]
在飞行任务完成后,进行降落操作。降落同样分为自动降落和手动降落两种方法。自动降落:1.确定飞行模式已切换至“p”模式。2. 点击向下按钮,确认安全降落条件,点击按钮确定进入自动降落。3. 飞行器原地下降,并放下起落架,然后降落并关闭电机。手动降落则有两种停机方式:1.飞行器着地之后,将油门杆推到最低的位置并保持,3秒后电机停止。2.飞行器着地之后,先将油门杆推到最低位置,然后执行“内八”掰杆动作,电机将立即停止。停止后松开摇杆。使用方式2停止电机时,若飞行器未完全着地,则有可能存在侧翻的危险。一般推荐使用方式1停止电机。
[0093]
完成以上试飞流程后,即可开始进行数据采集。
[0094]
移动激光雷达测量系统成功搭载在无人机平台上后,按照上述飞行流程,进行一次数据采集飞行测试。飞行任务完成以后,远程终端已收集到采集的测量数据。经过后期数据处理,本次测试采集到的数据均合格可用。证明研制的高速多模式时间同步模块能顺利安装到低空无人机上进行实地测量测试,采集的数据满足精度要求。
[0095]
本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1