一种机器人导航定位误差的测量方法、装置及介质与流程
1.本发明属于导航定位技术领域,具体涉及一种机器人导航定位误差的测量方法、装置及介质。
背景技术:
2.随着科技的发展,移动机器人已经在全世界范围内得到了广泛的运用,目前移动机器人能自主导航完成特定任务,在导航过程中,定位是导航的基本环节,机器人的实时精准定位是提高移动机器人导航性能的关键,为了判断机器人导航定位是否准确,通常需要测量机器人导航定位的误差,其中机器人导航定位的误差测量是指对机器人行进的实际停靠位置和目标站点停靠位置的误差计算。
3.在对机器人进行导航误差测量时,为了计算机器人行进的实际停靠位置和目标站点停靠位置的误差,一种比较常见的方式是使用工具测量,但是人工测量的方式耗费人力,成本高,且耗时。为了克服人工测量带来的技术缺陷,现有技术中还提出在目标停靠位置放置二维码并标定特定的点,通过图像处理完成实际停靠位置到标定的特定点的距离误差计算,这种方式虽然解放了人力,但是通过二维码标定的方式只能计算机器人实际停靠位置到目标停靠位置处二维码特定点的像素距离,不能计算机器人实际停靠位置相对目标站点停靠位置的角度偏差。因此现有技术中至少存在的技术问题有:
4.(—)、虽然采用了二维码标定特定点的方式能计算导航定位过程的距离误差,但由于二维码受环境光影响大,采用传统二维码图像的方法鲁棒性差,影响测量精度;
5.(二)、现有技术中自动测量导航定位误差时,只能计算实际停靠位置与目标站点的距离误差,不能计算相对目标站点偏离的角度误差。
技术实现要素:
6.本发明提出一种机器人导航定位误差的测量方法,以解决现有技术中存在的受环境光影响大、定位鲁棒性差,不能计算实际停靠位置与目标站点的角度误差,影响测量精度的技术问题。
7.本发明通过以下技术方案实现:
8.一种机器人导航定位误差的测量方法,包括用于摄像的摄像头和用于发射激光的激光器,其特征在于,包括以下步骤:
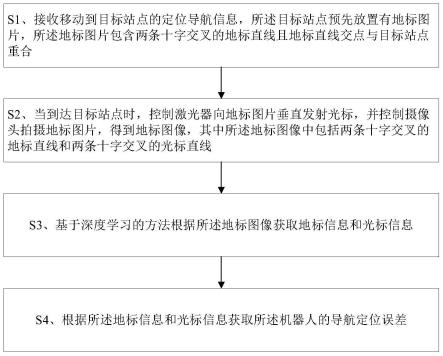
9.s1、接收移动到目标站点的定位导航信息,所述目标站点预先放置有地标图片,所述地标图片包含两条十字交叉的地标直线且地标直线交点与目标站点重合;
10.s2、当到达目标站点时,控制激光器向地标图片垂直发射光标,并控制摄像头拍摄地标图片,得到地标图像,其中所述地标图像中包括两条十字交叉的地标直线和两条十字交叉的光标直线;
11.s3、基于深度学习的方法根据所述地标图像获取地标信息和光标信息;
12.s4、根据所述地标信息和光标信息获取所述机器人的导航定位误差。
13.进一步的,所述基于深度学习的方法根据所述地标图像获取地标信息和光标信息包括:
14.使用编码器-解码器结构预测地标直线和光标直线概率分布的热力图;
15.对所述热力图进行阈值过滤和类别判断得到地标二值化图像和光标二值化图像;
16.使用霍夫变换方式对所述地标二值化图像进行直线检测,得到地标信息;
17.使用霍夫变换方式对所述光标二值化图像进行直线检测,得到光标信息。
18.具体的,所述地标二值化图像中包括两条相互垂直的地标直线,所述光标二值化图中包括两条相互垂直的光标直线。
19.具体的,所述光标信息包括两个光标直线方程,所述地标信息包括两个地标直线方程。
20.进一步的,所述根据所述地标信息和光标信息获取所述机器人的导航定位误差包括:根据所述光标信息计算出光标直线交点,根据所述地标信息计算出地标直线交点,以及根据所述光标直线交点和地标直线交点计算交点连线的距离值以及交点连线与x轴之间的夹角。
21.进一步的,所述根据所述地标信息和光标信息获取所述机器人的导航定位误差还包括:将所述交点连线的距离值转换为机器人世界坐标系下的距离误差。
22.具体的,所述两个地标直线方程为:
23.y1=k11*x1+b11
24.y1=k12*x1+b12
25.所述两个光标直线方程为:
26.y2=k21*x2+b21
27.y2=k22*x2+b22
28.其中(x1,y1)表示地标直线的交点,(x2,y2)表示光标直线的交点,且:
29.x1=-(b11-b12)/(k11-k12)
30.y1=k11*(-(b11-b12)/(k11-k12))+b11
31.x2=-(b21-b22)/(k21-k22)
32.y2=k21*(-(b21-b22)/(k21-k22))+b21。
33.一种机器人导航定位误差的测量装置,包括:
34.接收模块,用于接收移动到目标站点的定位导航,所述目标站点预先放置有地标图片,所述地标图片包含两条十字交叉的地标直线且地标直线交点与目标站点重合;
35.图像获取模块,用于当到达目标站点时,控制激光器向地标图片垂直发射光标,并控制摄像头拍摄地标图片,得到地标图像,其中所述地标图像中包括两条十字交叉的地标直线和两条十字交叉的光标直线;
36.信息获取模块,用于基于深度学习的方法根据所述地标图像获取地标信息和光标信息)
37.误差获取模块,用于根据所述地标信息和光标信息获取所述机器人的导航定位误差。
38.本发明还包括一种非易失性存储介质,其包括一条或多条计算机指令,所述一条或多条计算机指令在执行时实现上述的测量方法。
39.与现有技术相比,本发明至少具有下述的有益效果或优点:
40.本发明采取十字地标和十字光标标定位置的方式,并结合深度学习的图像处理方法获取地标信息和光标信息,相比现有技术中采用二维码标定的传统图像处理方法,不受环境光影响,鲁棒性更好,测量精度高。
附图说明
41.以下将结合附图对本发明做进一步详细说明;
42.图1为本发明的机器人导航定位误差的测量方法的流程图;
43.图2为本发明的机器人导航定位误差的测量场景示意图;
44.图3为本发明的机器人导航定位误差的测量的地标图片的室内拍照示意图;
45.图4为本发明的机器人导航定位误差的测量的地标图片的室外拍照示意图;
46.图5为本发明的机器人导航定位误差的测量的地标直线的二值化图;
47.图6为本发明的机器人导航定位误差的测量的光标直线的二值化图;
48.图7为本发明的机器人导航定位误差的测量中计算交点连线距离和交点与x轴夹角的示意图;
49.图8为本发明的机器人导航定位误差的测量装置示意图。
具体实施方式
50.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.如图1所示,本发明涉及一种导航定位误差的测量方法,包括用于摄像的摄像头和用于发射激光的激光器,包括以下步骤:
52.s1、接收移动到目标站点的定位导航信息,所述目标站点预先放置有地标图片,所述地标图片包含两条十字交叉的地标直线且地标直线交点与目标站点重合;
53.s2、当到达目标站点时,控制激光器向地标图片垂直发射光标,并控制摄像头拍摄地标图片,得到地标图像,其中所述地标图像中包括两条十字交叉的地标直线和两条十字交叉的光标直线;
54.s3、基于深度学习的方法根据所述地标图像获取地标信息和光标信息;
55.s4、根据所述地标信息和光标信息获取所述机器人的导航定位误差。
56.根据一个具体实施例的测量场景,如图2所示,将地标图片4预先放置于地面上的目标站点,摄像头能够俯拍到地面上的地标图片,且激光发射器能够发射垂直于地标图片的光标。优选地,摄像头和激光发射器2可以固定在一起,然后不限于通过支架1绑定在机器人3上,以使摄像头能够俯拍到地面上的地标图片,且激光发射器能够发射垂直于地标图片的光标。
57.具体的,所述激光发射器为十字激光发射器,所述地标图片包含两条十字交叉的地标直线,其中地标直线交叉点为地标直线交点。当机器人移动到目标站点停下时,激光发射器发射十字激光到地标图片,在地标图片上形成有十字交叉的两条光标直线,其中激光
直线交叉的点为光标直线交点,控制摄像头拍下所述地标图片得到地标图像。
58.具体的,地标图片是预先置放在目标站点上的一个类似靶标形态的图片。每次测试当机器人移动到目标点停下时,摄像头就会拍摄对应的地标图片。拍摄的图片可以参考图3和图4所示,从图3和图4可看出,地标图片上的图案包含有一个圆和交叉于圆点的两条垂直地标线,所述地标图案上的圆点与机器人目标站点重合,由于存在导航定位误差,所述激光器从上往下打在地标图片上形成对应的十字光标的交点偏离于地标线交点,且如图3和4所示,同一个地标图片在室内环境和室外环境下,由于受到光照影响室内和室外的光标直线和地标直线都在肉眼视觉上会有比较大的差别,如果使用传统图像方法计算其坐标可能会产生很大的误差。。
59.根据上述实施例,本发明的机器人接收移动到目标站点的定位导航信息,所述目标站点预先放置有地标图片,所述地标图片包含两条十字交叉的地标直线且地标直线交点与目标站点重合;当到达目标站点时,控制激光器向地标图片垂直发射光标,并控制摄像头拍摄地标图片,得到地标图像,其中所述地标图像中包括两条十字交叉的地标直线和两条十字交叉的光标直线;然后基于深度学习的方法根据所述地标图像获取地标信息和光标信息,再根据所述地标信息和光标信息获取所述机器人的导航定位误差。本发明采取十字地标和十字光标标定位置的方式,并结合深度学习的图像处理方法获取地标信息和光标信息,相比现有技术中采用二维码标定的传统图像处理方法,不受环境光影响,鲁棒性更好,测量精度高。
60.根据一个具体的实施例,步骤s3中,基于深度学习的方法根据所述地标图像获取地标信息和光标信息包括:
61.使用编码器-解码器结构预测地标直线和光标直线概率分布的热力图;
62.对所述热力图进行阈值过滤和类别判断得到地标二值化图像和光标二值化图像;
63.使用霍夫变换方式对所述地标二值化图像进行直线检测,得到地标信息;
64.使用霍夫变换方式对所述光标二值化图像进行直线检测,得到光标信息。
65.具体的,所述地标二值化图像中包括两条相互垂直的地标直线,所述光标二值化图中包括两条相互垂直的光标直线,所述光标信息包括两个光标直线方程,所述地标信息包括两个地标直线方程。
66.根据一个具体的实施例,步骤s3中,所述根据所述地标信息和光标信息获取所述机器人的导航定位误差包括:根据所述光标信息计算出光标直线交点,根据所述地标信息计算出地标直线交点,然后根据所述光标直线交点和地标直线交点计算交点连线的距离值以及交点连线与x轴之间的夹角。
67.根据一个具体的实施例,步骤s3中,所述根据所述地标信息和光标信息获取所述机器人的导航定位误差还包括:将所述交点连线的距离值转换为机器人世界坐标系下的距离误差。
68.根据一个具体的实施例,如图7所示,计算所述交点连线与x轴的夹角angle和交点连线距离值distance,先获取光标直线和地标直线的直线方程,
69.所述两个地标直线方程为:
70.y1=k11*x1+b11
71.y1=k12*x1+b12
72.所述两个光标直线方程为:
73.y2=k21*x2+b21
74.y2=k22*x2+b22
75.其中(x1,y1)表示地标直线的交点,(x2,y2)表示光标直线的交点,且:
76.x1=-(b11-b12)/(k11-k12)
77.y1=k11*(-(b11-b12)/(k11-k12))+b11
78.x2=-(b21-b22)/(k21-k22)
79.y2=k21*(-(b21-b22)/(k21-k22))+b21
80.根据上述交点的信息,获取交点连线与x轴的夹角angle和交点连线距离值distance为:
81.angle=arctan(∣(k2-k1)/(1+k1k2)∣)
82.distance=sqrt((x1-x2)*(x1-x2)+(y1-y2)*(y1-y2))。
83.根据本发明上述实施例,将所述距离和夹角转换为机器人世界坐标系下的导航定位距离误差和角度误差。由于通过摄像头的预置参数将地标图片所在平面坐标系的距离distance转换为机器人世界坐标系下的导航定位距离误差是现有技术,在此不再详细说明,且夹角angle实际计算中,不需要转换,所述得到的夹角angle即为机器人导航定位的角度偏差。相比现有技术只能获得距离误差,本发明通过十字地标和十字光标的计算,能同时自动获得角度误差和距离误差。
84.根据本发明一个具体的实施例,如图8所示,还提供一种机器人导航定位误差的测量装置,包括:
85.接收模块,用于接收移动到目标站点的定位导航,所述目标站点预先放置有地标图片,所述地标图片包含两条十字交叉的地标直线且地标直线交点与目标站点重合;
86.图像获取模块,用于当到达目标站点时,控制激光器向地标图片垂直发射光标,并控制摄像头拍摄地标图片,得到地标图像,其中所述地标图像中包括两条十字交叉的地标直线和两条十字交叉的光标直线;
87.信息获取模块,用于基于深度学习的方法根据所述地标图像获取地标信息和光标信息)
88.误差获取模块,用于根据所述地标信息和光标信息获取所述机器人的导航定位误差。
89.具体的,上述机器人导航定位误差的测量装置与测量方法的过程一一对应,在此不再详细赘述。
90.本发明还提供了一种非易失性存储介质,其包括一条或多条计算机指令,所述一条或多条计算机指令在执行时实现上述测量方法。
91.以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限定本发明的保护范围。在不脱离本发明之精神和范围内,所做的任何修改、等同替换、改进等,同样属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1