车道偏离检测方法、装置、电子设备及存储介质与流程
本技术涉及智能交通,特别是涉及一种车道偏离检测方法、装置、电子设备及存储介质。
背景技术:
1、随着科学技术的发展,自动驾驶、辅助驾驶、智能导航等智能交通技术的应用变得越来越广泛。在智能交通技术的应用中,车道偏离检测是一种重要的信息检测手段,相关技术中,在进行车道偏离检测时,一般需要依赖信息采集设备来采集周围的环境信息,进而根据采集到的环境信息来得到车道偏离检测的结果。然而,采集环境信息时容易受到当前环境因素变化的影响,从而降低了车道偏离检测的准确性。
技术实现思路
1、以下是对本文详细描述的主题的概述。本概述并非是为了限制权利要求的保护范围。
2、本技术实施例提供了一种车道偏离检测方法、装置、电子设备及存储介质,能够提升车道偏离检测的准确性。
3、一方面,本技术实施例提供了一种车道偏离检测方法,包括:
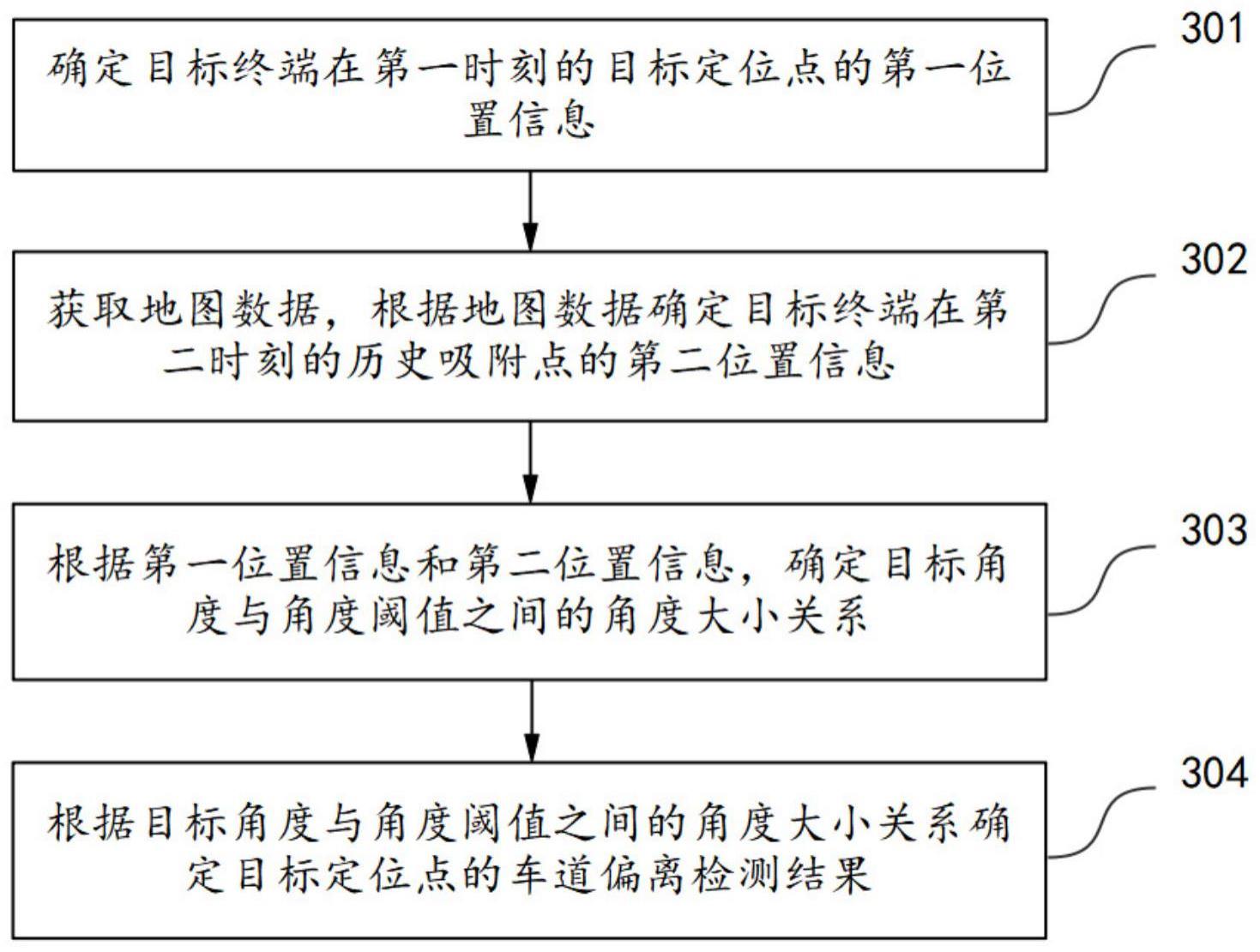
4、确定目标终端在第一时刻的目标定位点的第一位置信息;
5、获取地图数据,根据所述地图数据确定所述目标终端在第二时刻的历史吸附点的第二位置信息,其中,所述第二时刻早于所述第一时刻;
6、根据所述第一位置信息和所述第二位置信息,确定目标角度与角度阈值之间的角度大小关系,其中,所述目标角度为第一方向和第二方向之间的角度,所述第一方向为所述历史吸附点指向所述目标定位点的方向,所述第二方向为所述目标终端的移动方向旋转预设角度后的方向;
7、根据所述角度大小关系确定所述目标定位点的车道偏离检测结果。
8、另一方面,本技术实施例还提供了一种车道偏离检测方法,包括:
9、确定目标终端在第一时刻的目标定位点的第一位置信息;
10、获取地图数据,根据所述地图数据确定所述目标终端在第二时刻的历史吸附点的第二位置信息,其中,所述第二时刻早于所述第一时刻;
11、根据所述第一位置信息和所述第二位置信息,确定目标角度与角度阈值之间的角度大小关系,其中,所述目标角度为第一方向和第二方向之间的角度,所述第一方向为所述历史吸附点指向所述目标定位点的方向,所述第二方向为所述目标终端的移动方向旋转预设角度后的方向;
12、根据所述角度大小关系确定所述目标终端所在的车辆的车道偏离检测结果。
13、另一方面,本技术实施例还提供了一种车道偏离检测装置,包括:
14、第一定位点确定模块,用于确定目标终端在第一时刻的目标定位点的第一位置信息;
15、第一吸附点确定模块,用于获取地图数据,根据所述地图数据确定所述目标终端在第二时刻的历史吸附点的第二位置信息,其中,所述第二时刻早于所述第一时刻;
16、第一比较模块,用于根据所述第一位置信息和所述第二位置信息,确定目标角度与角度阈值之间的角度大小关系,其中,所述目标角度为第一方向和第二方向之间的角度,所述第一方向为所述历史吸附点指向所述目标定位点的方向,所述第二方向为所述目标终端的移动方向旋转预设角度后的方向;
17、第一检测模块,用于根据所述角度大小关系确定所述目标定位点的车道偏离检测结果。
18、进一步,上述第一检测模块具体用于:
19、根据所述地图数据,确定目标道路中所述目标定位点所在的车道的车道标识;
20、根据所述车道标识确定所述目标定位点所在的车道的车道类型,根据所述车道类型和所述角度大小关系确定所述目标定位点的车道偏离检测结果;
21、其中,所述车道类型包括边缘车道和非边缘车道,所述边缘车道为位于所述目标道路左右两侧的车道,所述非边缘车道为所述目标道路中除了所述边缘车道以外的其他车道。
22、进一步,所述第二方向为所述目标终端的移动方向逆时针旋转所述预设角度后的方向,上述第一检测模块具体用于:
23、当所述车道类型为所述目标道路左侧的边缘车道,且所述角度大小关系为所述目标角度小于所述预设角度,确定所述目标定位点的车道偏离检测结果为所述目标定位点存在车道偏离趋势;
24、或者,当所述车道类型为所述目标道路右侧的边缘车道,且所述角度大小关系为所述目标角度大于所述预设角度,确定所述目标定位点的车道偏离检测结果为所述目标定位点存在车道偏离趋势。
25、进一步,上述第一比较模块具体用于:
26、将第一直线与第二直线之间的相交角度作为所述目标角度,根据所述第一位置信息和所述第二位置信息,确定所述相交角度与角度阈值之间的角度大小关系,其中,所述第一直线经过所述历史吸附点和所述目标定位点,所述第二直线经过所述目标定位点,且所述第二直线与所述目标终端的移动方向之间的角度为所述预设角度;
27、或者,根据所述第一位置信息和所述第二位置信息,计算第一向量与第二向量之间的点积,根据所述点积确定目标角度与角度阈值之间的角度大小关系,其中,所述第一向量的起点为所述历史吸附点,所述第一向量的终点为所述目标定位点,所述第二向量的起点为所述目标定位点,且所述第二向量与所述目标终端的移动方向之间的角度为所述预设角度。
28、进一步,上述第一检测模块具体用于:
29、根据所述第一位置信息计算所述目标定位点与所述目标定位点所在的车道之间的偏离距离;
30、确定所述偏离距离与第一距离阈值之间的距离大小关系;
31、根据所述角度大小关系和所述距离大小关系确定所述目标定位点的车道偏离检测结果。
32、进一步,上述第一检测模块具体用于:
33、根据所述第一位置信息和所述第二位置信息,计算第一向量在第二向量上的投影距离;
34、将所述投影距离作为所述目标定位点与所述目标定位点所在的车道之间的偏离距离;
35、其中,所述第一向量的起点为所述历史吸附点,所述第一向量的终点为所述目标定位点,所述第二向量的起点为所述目标定位点,且所述第二向量与所述目标终端的移动方向之间的角度为所述预设角度。
36、进一步,上述第一吸附点确定模块具体用于:
37、确定目标时间范围,根据所述目标时间范围从所述地图数据中获取所述目标终端在第二时刻的历史吸附点的第二位置信息,其中,所述第二时刻为所述目标时间范围中的时刻,所述目标时间范围中任意一个时刻与所述第一时刻的之间的时间差小于或者等于时间差阈值;
38、或者,确定目标距离范围,根据所述目标距离范围从所述地图数据中获取所述目标终端在第二时刻的历史吸附点的第二位置信息,其中,所述目标距离范围中任意一个吸附点与所述目标定位点之间的距离小于或者等于第二距离阈值。
39、进一步,上述第一定位点确定模块具体用于:
40、确定所述目标终端在第一时刻对应的位置测量信号;
41、获取定位函数和预设的定位状态参数;
42、将所述位置测量信号和所述定位状态参数代入至所述定位函数,计算所述目标终端在所述第一时刻的目标定位点的第一位置信息。
43、进一步,上述车道偏离检测装置还包括修正模块,上述修正模块具体用于:
44、当所述车道偏离检测结果为所述目标定位点存在车道偏离趋势,计算所述第一位置信息的量测误差,根据所述量测误差计算所述定位状态参数的参数修正量,根据所述参数修正量对所述定位状态参数进行修正,将所述位置测量信号和修正后的所述定位状态参数代入至所述定位函数,计算修正后的所述第一位置信息;
45、或者,当所述车道偏离检测结果为所述目标定位点存在车道偏离趋势,计算所述第一位置信息的量测误差,根据所述量测误差计算所述定位状态参数的参数修正量,对所述定位函数进行一阶泰勒展开,将修正前的所述定位状态参数和所述参数修正量代入至展开后的所述定位函数,计算修正后的所述第一位置信息。
46、进一步,上述修正模块具体用于:
47、根据所述第一位置信息计算所述目标定位点与所述目标定位点所在的车道之间的偏离距离,将所述偏离距离作为所述第一位置信息的量测误差;
48、或者,根据所述第一位置信息计算所述目标定位点与目标参考点之间的参考距离,将所述参考距离作为所述第一位置信息的量测误差,其中,所述目标参考点位于所述目标定位点所在的车道的中心线上,且所述历史吸附点与所述目标定位点之间的距离等于所述历史吸附点与所述目标参考点之间的距离。
49、另一方面,本技术实施例还提供了一种车道偏离检测装置,包括:
50、第二定位点确定模块,用于确定目标终端在第一时刻的目标定位点的第一位置信息;
51、第二吸附点确定模块,用于获取地图数据,根据所述地图数据确定所述目标终端在第二时刻的历史吸附点的第二位置信息,其中,所述第二时刻早于所述第一时刻;
52、第二比较模块,用于根据所述第一位置信息和所述第二位置信息,确定目标角度与角度阈值之间的角度大小关系,其中,所述目标角度为第一方向和第二方向之间的角度,所述第一方向为所述历史吸附点指向所述目标定位点的方向,所述第二方向为所述目标终端的移动方向旋转预设角度后的方向;
53、第二检测模块,用于根据所述角度大小关系确定所述目标终端所在的车辆的车道偏离检测结果。
54、另一方面,本技术实施例还提供了一种电子设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的车道偏离检测方法。
55、另一方面,本技术实施例还提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行实现上述的车道偏离检测方法。
56、另一方面,本技术实施例还提供了一种计算机程序产品,该计算机程序产品包括计算机程序,该计算机程序存储在计算机可读存介质中。计算机设备的处理器从计算机可读存储介质读取该计算机程序,处理器执行该计算机程序,使得该计算机设备执行实现上述的车道偏离检测方法。
57、本技术实施例至少包括以下有益效果:通过目标终端在第一时刻的目标定位点的第一位置信息和第二时刻的历史吸附点的第二位置信息,确定第一方向和第二方向之间的目标角度,进而根据目标角度与角度阈值之间的角度大小关系,确定目标定位点的车道偏离检测结果或者目标终端对应的车辆的车道偏离检测结果,即引入目标终端的历史吸附点,利用目标终端的目标定位点和历史吸附点之间的位置关系来进行车道偏离检测,由于历史吸附点可以从地图数据中快捷地获取,因而无须采集环境信息来进行车道偏离检测,从而降低环境因素变化所带来的影响,提升车道偏离检测的准确性;并且,由于无须采集环境信息,也可以扩大车道偏离检测的适用范围,降低车道偏离检测的成本。另外,由于第二方向为目标终端的移动方向旋转预设角度后的方向,因而当目标定位点或者目标终端对应的车辆往车道左右两侧发生车道偏离时,第一方向和第二方向之间的目标角度会存在差异,从而能够确定目标定位点或者目标终端对应的车辆发生车道偏离的方向,提升车道偏离检测的精细化程度。
58、本技术的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术而了解。本技术的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
- 还没有人留言评论。精彩留言会获得点赞!