一种无载频脉冲探地雷达发射机性能评价方法与流程
1.本发明属于无损检测领域,特别涉及该领域中的一种无载频脉冲探地雷达发射机性能评价方法。
背景技术:
2.探地雷达(ground penetrating radar,gpr)是一种快速、高效、无损探测的地球物理勘察设备。探地雷达利用一个天线发射高频电磁波,而另一个天线接收来自地下目标介质界面的反射波,然后对获取的数据进行分析处理,进而得到地下目标的分布状态。探地雷达是否能够接收到反射波,以及得到反射波的大小,主要取决于探地雷达发射机,因此发射机的好坏决定了探地雷达的成败,发射机的幅度高,提供的能量多,接收天线能够接收到的信号强,探地雷达就可以探测更深的目标。发射机的中心频率高,探地雷达的分辨率就高,就可以探测更小的目标。因此,发射机的研究是探地雷达系统的关键,对发射机的评价方法同样非常重要。发射机的输出信号相对输入信号的抖动决定着雷达信号是否稳定,决定着探地雷达系统是否稳定及最终探地雷达系统检测深度的准确性。
技术实现要素:
3.本发明所要解决的技术问题就是提供一种无载频脉冲探地雷达发射机性能的综合评价方法。
4.本发明采用如下技术方案:一种无载频脉冲探地雷达发射机性能评价方法,其改进之处在于,包括如下步骤:步骤1,用转接控制电路板将发射机与探地雷达主机连接起来,使探地雷达主机为发射机提供直流电和输入触发脉冲信号;步骤2,开启探地雷达主机,使发射机正常工作;步骤3,开启含有两个以上通道的示波器,用示波器的通道1测试发射机输入触发脉冲端,通道2测试发射机输出脉冲端;步骤4,将示波器的触发方式设定为第一通道触发,将第二通道信号上升沿或下降沿移动至第一通道,使两个通道信号在同一个位置;步骤5,调节示波器的幅度轴,使两个信号都占据示波器幅度方向的三分之二以上;步骤6,调节示波器的时间轴,使通道1信号的上升沿占据示波器的三分之二;步骤7,用示波器分别保存两个通道的数据;步骤8,读取已经保存的数据,包括两个通道的时间和幅度信息;步骤9,计算通道2对应于通道1幅度位置点所占据的时间宽度;步骤10,通道2得到的时间宽度即是通道2相对通道1的最大相对时间抖动。
5.进一步的,在步骤10中,等时间间隔的选取多个相对时间抖动值,多个相对时间抖动值的平均值即为最大相对时间抖动平均值。
6.本发明的有益效果是:除了发射机输出脉冲自身的幅度和上升时间等关键指标外,本发明提供了另外一种对发射机性能进行评价的方法。
7.发射机有幅度抖动,则发射机不稳定,抖动越大,越不稳定,造成雷达在幅度上的抖动,幅度抖动可以在数据采集时通过道间平均进行处理,可以减小幅度抖动造成的影响。发射机相对时间抖动越大,说明发射机的输出脉冲相对输入脉冲的抖动越大,发射机输出脉冲时间抖动也很大,亦即发射机本身时间长度轴不稳定,可能造成雷达波形在时间轴的抖动,进而影响雷达深度探测的准确性,因此必须将其修正,以使发射机时间轴稳定,保证探地雷达波形稳定,从而更好的进行深度探测及目标定位。
8.本发明方法可以直接测试发射机的性能,对发射机的性能进行评价,而不必通过天线或探地雷达的整体性能侧面反馈,简略了操作步骤,节省了评价时间,在评价发射机性能方面有重大意义。
附图说明
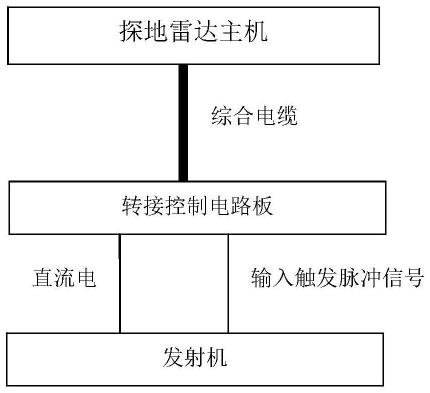
9.图1是探地雷达主机与发射机的连接示意框图;图2是发射机与示波器的连接示意框图;图3是示波器调节两通道波形的示意图;图4是某一时刻输出脉冲相对输入脉冲所占时间宽度的示意图。
具体实施方式
10.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图和实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
11.实施例1,本实施例公开了一种无载频脉冲探地雷达发射机性能评价方法,可以综合评价探地雷达发射机相对时间抖动,通过对发射机自身指标的测试来进行发射机优劣的评价。发射机除了自身输出脉冲的幅度和上升时间等关键指标外,还应进行输入脉冲与输出脉冲相对时间抖动的测试。发射机抖动会影响到整个天线的抖动,进而影响探地雷达后期的数据处理,最终影响地下目标成像。通过计算发射机输出脉冲与输入脉冲的最大相对时间抖动的方法,提供了一种评价发射机优劣的方法机制,具体包括如下步骤:步骤1,如图1所示,用转接控制电路板将发射机与探地雷达主机连接起来,使探地雷达主机为发射机提供直流电和输入触发脉冲信号;步骤2,开启探地雷达主机,使发射机正常工作;步骤3,开启含有两个以上通道的示波器,如图2所示,用示波器的通道1测试发射机输入触发脉冲端,通道2测试发射机输出脉冲端;步骤4,将示波器的触发方式设定为第一通道触发,将第二通道信号上升沿或下降沿移动至第一通道,使两个通道信号在同一个位置;步骤5,调节示波器的幅度轴,使两个信号都可以占据示波器幅度方向的三分之二以上;步骤6,调节示波器的时间轴,使通道1信号的上升沿占据示波器的三分之二左右;
步骤7,用示波器分别保存两个通道的数据;步骤8,在电脑上编写软件读取已经保存的数据,包括两个通道的时间和幅度信息;步骤9,用软件计算通道2对应于通道1幅度位置点所占据的时间宽度;步骤10,通道2得到的时间宽度即是通道2相对通道1的最大相对时间抖动。可以等时间间隔的选取多个相对时间抖动值,多个相对时间抖动值的平均值即为最大相对时间抖动平均值。
12.具体的说,本方法由探地雷达主机进行控制,主要进行直流电和输入触发脉冲的控制。由主机将直流电和输入触发脉冲经转接控制电路板传送至发射机,提供发射机工作的能量和正常工作的触发脉冲。
13.如图3所示,发射机工作后,在示波器上分别测量发射机的输入触发脉冲和输出脉冲,将两个脉冲调节至同一个信号位置,用示波器保存两个通道的数据,最后在电脑中编写程序分析这两个通道的数据。
14.读取通道的幅度值,其最小幅值为v
min
,最大幅值为v
max
,由于其上升沿的开始和最末有波形的突变,分析时应舍弃这两部分脉冲。本发明分析指标时选取上升沿的20%—80%。
15.将上升沿的20%—80%部分以5%幅度间隔选取幅度点,即25%、30%、35%、40%,45%、50%、55%、60%、65%、70%、75%,分别将其标记为v1、v2、v3、v4、v5、v6、v7、v8、v9、v10、v11。
16.如图4所示,选取通道1的某一个幅度v1,准确说是读取其所在幅度轴的位置,然后读取通道2在相同幅度轴位置时的时间位置,其中心位置记为t
out1
,由于输出脉冲会存在一定的时间抖动,导致该时间位置的波形有的会早一点到达,有的会晚一点到达,故其会占有一定的宽度,其起始位置记为t
out1a
,末端位置记为t
out1b
。由此计算得到该位置最大相对时间抖动为:t
jitter1
=t
out1b-t
out1a
。
17.同理,可以选取通道1的另一个幅度v2,应用相同的办法计算得到v2位置对应的通道2输出脉冲的最大相对时间抖动为:t
jitter2
=t
out2b-t
out2a
。以此类推,可以得到t
jitter3
、t
jitter4
、t
jitter5
、t
jitter6
...t
jitter11
。
18.将11个最大相对时间抖动取平均值,t
jitter-avg
=(t
jitter1
+j
jitter2
+...+t
jitter11
)/11。
19.以上计算过程均通过编写程序使用软件计算得到,计算过程的时间可忽略,因此这种评价方式比将探地雷达系统安装完整后通过系统指标侧面反映性能要快很多。
20.工程上一般认为,此平均值应小于10%才可以满足探地雷达检测的基本要求,特殊场合,可能要求该值小于5%,甚至更小,这对发射机提出更高要求,研制、生产、调试均增加了难度,可能会成倍的增加成本,因此可以适当调整该值以使利益最大化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1