校靶设备在动基座平台和外场振动环境下高精度校靶方法与流程
1.本发明涉及计算机视觉、精密测量及飞机校靶领域,是一种解决视觉校靶设备在舰基动基座和外场振动环境下高精度校靶方法。
背景技术:
2.飞机校靶的工作环境主要是部队外场,在外场进行测试时,不可避免的会受到风及周围振动环境的影响,造成飞机或校靶设备的振动,或者在舰船上由于舰船晃动时也会造成飞机或校靶设备晃动,传统校靶方法在这类复杂条件下无法进行高精度的校靶测量。
3.在进行飞机校靶作业时需要先测量飞机机身标记的诺干个参考点,通过这些参考点的三维坐标拟合得出飞机坐标系,由于飞机参考点位于机身不同位置,基本是在飞机两侧,由于飞机体积较大,在获取各点坐标时,无法一次将所有参考点全部同时采集,需要分时对机身上的诺干个参考点逐次测量,得出各个参考点在校靶系统相机坐标系下的三维坐标,并通过算法对这些点进行三维拟合得出校靶系统相机坐标系与飞机坐标系的位姿关系,再通过校靶系统对被校机载设备托架上安装的校靶夹具进行测量,得出校靶夹具在视觉校靶系统相机坐标系下的姿态信息,最终通过算法得出被校设备托架与飞机坐标系的位姿关系。
4.以上整个测量过程都以相机坐标系为基准,因此在测量过程中需要保持校靶系统主机和飞机完全相对静止的状态,否则当有一方优于外场振动或舰基动基座平台下摇晃时在飞机坐标系建立分时测量飞机上的参考点时,会引起部分参考点或者夹具位置发生偏移,主机坐标系下测量的三维坐标或姿态数据发生变化,导致在参考点和夹具之间的关系发生偏移,不再是理论的位姿关系,最终在飞机坐标系拟合或校靶夹具姿态测量产生较大的测量误差甚至是测量错误,严重影响校靶精度,因此传统校靶方法无法在动基座平台和外场振动环境下进行高精度校靶。
技术实现要素:
5.本发明为解决如何在飞机晃动情况下进行高精度校靶测量的技术问题,提供一种校靶设备在动基座平台和外场振动环境下高精度校靶方法。
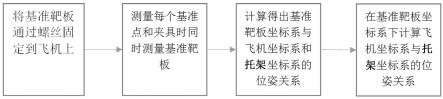
6.本发明是采用如下技术方案实现的:校靶设备在动基座平台和外场振动环境下高精度校靶方法,包括如下步骤:包括如下步骤:步骤(1):将基准靶板固定到飞机上,使其与飞机刚性连接;步骤(2):用测量笔依次测量飞机上i个参考点的三维坐标,i为飞机坐标系建立时飞机参考点数量,在测量每个参考点时校靶系统相机同时拍摄采集基准靶板和测量笔信息;步骤(3):相机拍摄完第i个参考点,能够测量得出相机与基准靶板的旋转矩阵r
bp
i、相机与基准靶板的平移矩阵t
bp
i,相机与参考点的平移矩阵t
cp
i,并通过计算直接将飞机上每个参考点坐标转换到基准靶板坐标系上;
步骤(4):所有参考点测量完成后,利用svd分解可求出飞机坐标系和基准靶板坐标系的旋转矩阵t1和平移矩阵t2,即将飞机坐标系建立到基准靶板坐标系上;步骤(5):飞机坐标系建立完成后,相机同时拍摄安装在飞机被校靶机载设备托架(后续简称托架)上的校靶夹具和基准靶板,测量得出相机与基准靶板的旋转矩阵r
bj
、相机与基准靶板的平移矩阵t
bj
,相机与飞机安装托架的平移矩阵tj,并通过计算直接将飞机安装托架的姿态信息转换到基准靶板坐标系上;步骤(6):根据基准靶板坐标系与飞机坐标系和基准靶板坐标系与托架坐标系的位姿关系,得出飞机坐标系与托架坐标系的旋转矩阵,从而得到最终校靶结果。
7.本发明完全自主创新的提出了动态补偿方法,设计了与机身固连的基准靶板跟随机身一起振动,通过基准靶板建立虚拟的基准靶板坐标系,基准靶板安装时无需考虑安装精度,只要与飞机刚性连接,可保证飞机在振动时各参考点和夹具与基准靶板的关系不发生变化,利用视觉测量的多目标测量特点,每次测量时,同一瞬间同时采集基准靶板和测量笔状态,或同时采集基准靶板和夹具状态,可分别得到测量笔和夹具分别与基准靶板的相对关系,将飞机坐标系和托架坐标系由校靶主机坐标系转换建立到基准靶板上,抵消了由于振动产生的偏差,无需限制使用环境,只需在飞机上安装一个基准靶板,即可保证校靶设备在舰基动基座平台和外场振动环境下仍可满足高精度校靶测量,该发明已在外场进行了大量测试,可大大提高复杂环境下校靶作业的工作效率和测量精度。
附图说明
8.图1本发明的方法流程示意图。
9.图2基准靶板的结构示意图。
10.图3基准靶板坐标系转换图。1-中间立柱,2-顶板,3-底板,4-中部梁,5-连接杆,6-上侧梁,7-下侧梁,8-顶梁,9-底梁。
具体实施方式
11.在外场进行飞机校靶测量时,需要分别对机身上参考点进行坐标测量,来建立飞机坐标系,受风及周围振动环境的影响或在动基座平台下,机身和校靶系统会随着发生低频振动,由于坐标点的分时测量,飞机在振动时产生的偏移会对机身参考点和校靶夹具姿态测量引入额外的测量误差,造成飞机坐标系建立的不准确。
12.本发明要解决的问题是如何在飞机晃动情况下进行高精度校靶测量问题,这也是传统校靶方案固有的老大难问题。传统校靶测量方法需要分时拍照来获得飞机基准点的坐标,所有基准点坐标得到后再拟合建立飞机坐标系,每次基准点的坐标测量都以校靶设备的相机坐标系为基准。分时测量过程中,飞机的振动直接影响到基准点坐标与相机坐标系转换的准确性,必然会带来测量误差。在了解飞机机体结构后发现飞机基准点设计在飞机机体的主框架上,飞机振动时,机体主框架与基准点受振动影响程度是一致的,如果在测量每个参考点时,将计算结果都转换到与飞机机体运动相关联的坐标系中,就可以使参考点在飞机坐标系中的测量结果不受飞机晃动的影响。
13.结合图1所示,本发明针对传统校靶技术的不足,提供了一种在飞机上安装基准靶板进行随动和坐标系转换的测量方法,包括如下步骤:步骤(1):将基准靶板用螺丝固定到
飞机上,使其与飞机刚性连接;步骤(2):用测量笔依次测量飞机上i个参考点的三维坐标,i为飞机坐标系建立时飞机参考点数量,在测量每个参考点时校靶系统相机同时拍摄采集基准靶板和测量笔信息;步骤(3):相机拍摄完第i个参考点,能够测量得出相机与基准靶板的旋转矩阵r
bp
i、相机与基准靶板的平移矩阵t
bp
i,相机与参考点的平移矩阵t
cp
i,并通过计算直接将飞机上每个参考点坐标转换到基准靶板坐标系上;步骤(4):所有参考点测量完成后,利用svd分解可求出飞机坐标系和基准靶板坐标系的旋转矩阵t1和平移矩阵t2,即将飞机坐标系建立到基准靶板坐标系上;步骤(5):飞机坐标系建立完成后,相机同时拍摄安装在飞机被校靶机载设备托架上的校靶夹具和基准靶板,测量得出相机与基准靶板的旋转矩阵r
bj
、相机与基准靶板的平移矩阵t
bj
,相机与飞机安装托架的平移矩阵tj,并通过计算直接将飞机安装托架的姿态信息转换到基准靶板坐标系上;基准靶板坐标系转换图详见图3。
14.步骤(6):根据基准靶板坐标系与飞机坐标系和基准靶板坐标系与托架坐标系的位姿关系,得出飞机坐标系与托架坐标系的旋转矩阵,从而得到最终校靶结果。
15.如图2所示,所述基准靶板为一个14面体结构,该14面体包括中间立柱1、分别安装在中间立柱1顶部和底部的六边形的顶板2及底板3、沿中间立柱中部径向安装的六个中部梁4;六个中部梁4与顶板2和底板3的六个角指向一致,六个中部梁4朝外的一端通过连接杆5顺次连接构成一个中部六边形;中部梁4长度大于顶板2和底板3各角与其中心的连线;顶板2的六角通过六个上侧梁6与中部六边形的六角相连接,中部六边形的六角通过六个下侧梁7与底板3的六角相连接。顶板2和底板3周圈分别固定有顶梁8和底梁9,各个顶梁8之间、各个底梁9之间通过螺栓实现连接;上侧梁与顶梁之间、下侧梁与底梁之间、上、下侧梁与中部梁4之间通过螺栓连接。该十四面体的基准靶板可以方便相机进行360度全景的拍摄,提高了测量范围和外场环境下的测量精度。
16.本发明创造性提出了采用了基准靶板转换的测量方法,设计了一个14面体结构的基准靶板(基准靶板外形图见图2),通过三维点云拼接算法(所述算法见中国专利2022101280201一种单目视觉传感器混合式高精度三维结构恢复方法),标定建立了每个面间的精确的转换关系,将基准靶板刚性连接到飞机机体主框架上,使其与飞机机体振动运动同步,利用视觉测量可进行多目标识别的特点,通过拍摄同一瞬间基准靶板和测量笔或基准靶板和夹具的图像,可以计算出基准靶板和校靶设备相机坐标系的位姿关系,从而将每个基准点在相机坐标系下的数据都转换到基准靶板坐标系下进行计算,而基准靶板和飞机坐标系间是一个固定的常数矩阵,即无论测量过程中基准点的位置是否由于振动发生变化,基准点测量值相对飞机坐标系都是一致的。该发明不仅解决了飞机校靶过程中的机身晃动问题,而且可以将校靶设备相机放置在机身多种位置进行测量,避免了飞机参考点测量过程中有遮挡情况下的转站问题,实现对机身各点坐标的快速测量,从而解决了飞机校靶过程中的机身振动问题,也保证了在动基座平台下仍能保证高精度的测量。
17.全天候的保障是提升飞行器综合性能的有效手段,不能为保障提出限定条件,本着这样的原则,本发明申请人将外场振动环境和动基座平台下的高精度校靶作为一个痛点问题来解决。在进行了大量的调研、仿真及试验的基础上,创造性的提出采用基准靶板动态
补偿方法,通过外场测试验证已彻底解决了动基座平台和外场振动环境下的高精度校靶测量问题。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1