一种基于二维匹配滤波结果的快速自适应旁瓣抑制方法
1.本发明属于雷达信号处理技术领域,具体涉及一种基于二维匹配滤波结果的快速自适应 旁瓣抑制方法。
背景技术:
2.在脉冲雷达系统中,二维匹配滤波被广泛用于距离-多普勒成像。然而,二维匹配滤波处 理会在距离维和多普勒维分别产生距离旁瓣和多普勒旁瓣。在多目标场景下,强目标的距离
‑ꢀ
多普勒旁瓣会淹没弱目标或者被当作假目标造成虚警,严重影响雷达目标检测和参数估计性 能。在2009年《ieee transactions on signal process》的第57卷第3期第1084页至1097 页,tan xing等人发表的“range
–
doppler imaging via a train of probing pulses”一 文中提出了一种迭代自适应方法(iaa),该方法能够抑制距离-多普勒旁瓣,但其运算复杂度较 大,难以应用于实时系统。在2011年《ieee cie international conference on radar》的 第1809页至1812页,zhao bin等人发表的“range-doppler sidelobe and cluttersuppression via time range adaptive processing”一文中提出了一种自适应多脉冲压缩方 法(ampc),该方法能实现距离-多普勒旁瓣的抑制,但是具有较大的运算复杂度。在2012年 《ieee international radar conference》的第435页至440页,kong lingjiang等人发表 的“fast implementation of adaptive multi-pulse compression via dimensionalityreduction technique”一文中提出了一种快速自适应多脉冲压缩方法(fampc),该方法通过对 回波信号进行分段处理,能够降低运算量,但是会存在弱目标丢失问题。
技术实现要素:
3.有鉴于此,本发明的目的是提供一种基于二维匹配滤波结果的快速自适应旁瓣抑制方法, 能够快速有效抑制距离-多普勒旁瓣。
4.一种基于二维匹配滤波结果的旁瓣抑制方法,包括如下步骤:
5.步骤1:建立目标回波信号模型,对回波信号进行二维匹配滤波处理,具体方法如下:
6.假设脉冲雷达共发射m个脉冲,脉内采样点数为n,脉冲采样向量可以表示为:
7.s=[s
1 s2ꢀ…ꢀ
sn]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0008]
其中,sn表示发射信号的第n个采样点;雷达接收到的第m个脉冲的第l个采样单元对 应的n个连续采样向量ym(l)=[ym(l) ym(l+1)
ꢀ…ꢀ
ym(l+n-1)]
t
可以表示为:
[0009][0010]
其中,y(l)中各元素表示回波信号中各个采样点;m=1,2,...,m;g是一个 n
×
(2n-1)维的发射信号矩阵,l表示距离单元数,k表示多普勒单元数,x表示l
×
k 维的距离-多普勒像,x(l)是x中第l行向量的前n-1到后n-1行向量组成的子矩阵,是 (2n-1)
×
k维的x
的子矩阵;f是m
×
k维的多普勒矩阵,表示矩阵f
t
的第m列, nm(l)=[nm(l) nm(l+1)
…
nm(l+n-1)]
t
是n
×
1维的加性白噪声,各元素表示相 应位置的噪声;
[0011][0012][0013][0014][0015]
其中表示第p个多普勒单元对应的多普勒相移,p=1,2,...,k;
[0016]
m个脉冲的基带回波信号的第l个采样单元对应的n个连续采样矩阵可以表示为 y(l)=[y1(l) y2(l)
ꢀ…ꢀ
ym(l)],则第(l,k)个距离-多普勒单元的二维匹配滤波结果 为
[0017][0018]
其中fk表示矩阵f的第k列,n(l)=[n1(l) n2(l)
ꢀ…ꢀ
nm(l)]表示n
×
m维的噪 声矩阵,r=(shg)
t
=[r-n+1 r-n+2
ꢀ…ꢀrn-1
]
t
;
[0019]
二维匹配滤波结果表示为:
[0020][0021]
步骤2:构建距离维迭代自适应滤波器,在距离维进行迭代滤波,具体方法如下:
[0022]
对二维匹配滤波结果x
mf
按行分块,得
[0023][0024][0025]
其中,z=f
tf*
;x
mf
(1)表示x
mf
中第一行,其它以此类推;
[0026]
令:
[0027]
a=xz
[0028]
基于矩阵x和矩阵z计算得到矩阵a中各元素的值,将各元素表示为αk(l),将矩阵a 写成如下形式:
[0029][0030]
其中,a1,a2,...,ak表示矩阵a中各列;则有:
[0031][0032]
[0033]
a(l)表示矩阵a中第l行向量的前n-1到后n-1行向量组成的子矩阵;
[0034]
第(l,k)个距离-多普勒单元的二维匹配滤波结果可以进一步表示为:
[0035][0036]
其中:
[0037][0038]
其中,f(m,k)表示fk中的元素,也表示矩阵f的第m行、第k列元素; 基于二维匹配滤波结果的距离维代价函数为:
[0039][0040]
其中,e[
·
]表示求期望;wk(l)表示滤波器;
[0041][0042]
其中,k
r1
和k
r2
分别表示向量中包含的位于二维匹配滤波结果x
mf
(l,k)的 前、后单元数,kr=k
r1
+k
r2
+1表示距离维迭代自适应滤波器长度;
[0043][0044]
将j(l,k)对求偏导,并令其为0,可得距离维迭代自适应滤波器系数向量为:
[0045][0046]
假设不同单元的αk(l)互不相关,噪声是均值为零、功率为σ2的高斯白噪声,αk(l)与 噪声不相关,因此求得:
[0047][0048]
其中,表示矩阵d的第k
r1
+n列;
[0049]rk,l
=dλ
k,ldh
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0050][0051]
矩阵a的初值为a=x
mf
z;
[0052]
则求得:
[0053][0054]
根据公式(23),遍历k∈[1,k],l∈[1,l],可得αk(l)的估计值由此构成矩阵a 的估计值
[0055]
得到矩阵a的估计值后,用估计值更新矩阵a,完成距离维第一次迭代计算;利 用公式(20)计算当前的wk(l),再将当前的wk(l)代入公式(23),再次得到矩阵a的估 计值完成距离维第二次迭代计算;然后再利用公式(20)计算的当前的wk(l)的代入公 式(23)完成距离维第三次迭代,以此类推,多次迭代后即可抑制距离旁瓣;
[0056]
步骤3:构建多普勒维迭代自适应滤波器,在多普勒维进行迭代滤波,具体方法如下:
[0057]
令:
[0058][0059]
其中,β1,β2,
…
,β
l
表示矩阵b中各列,β
l
(k)表示矩阵b中第l列第k行的元素;
[0060][0061]
z=[z
1 z2ꢀ…ꢀ
zk]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0062]
x
l
=[x
l
(1) x
l
(2)
ꢀ…ꢀ
x
l
(k)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(27)
[0063]
则有:
[0064][0065]
基于距离维迭代结果的多普勒维代价函数为:
[0066][0067]
其中:
[0068][0069]
其中,k
d1
和k
d2
分别表示在向量中包含的位于β
l
(k)的前后单元数, kd=k
d1
+k
d2
+1表示多普勒维迭代自适应滤波器长度:
[0070][0071]
将对求偏导,并令其为0,可得多普勒维迭代自适应滤波器系数向量为:
[0072][0073]
假设不同单元的x
l
(k)互不相关,因此求得
[0074][0075]
其中,
[0076]
q(k)=[z(k,k-k
d1
) z(k,k-k
d1
+1)
ꢀ…ꢀ
z(k,k+k
d2
)]
t
ꢀꢀꢀꢀꢀ
(34)
[0077]
z(i,j)表示矩阵z的第i行第j列的元素;
[0078][0079]
其中:
[0080]
[0081]
因此,多普勒维迭代自适应滤波器系数向量可以表示为:
[0082][0083]
则求得:
[0084][0085]
根据公式(38),遍历l∈[1,l],k∈[1,k],得x
l
(k)的估计值由此得到矩阵x的 估计值完成第一次多普勒维迭代;其中,在第一次迭代时,公式(36)中的矩阵x的初 值为步骤2迭代完成输出的矩阵a的估计值;
[0086]
用第一次迭代得到的估计值更新当前的x
l
(k),基于公式(38)利用当前的x
l
(k) 再次计算估计值完成第二次多普勒维迭代计算;依次类推,反复利用公式(38)进 行多次迭代后完成多普勒旁瓣抑制。
[0087]
较佳的,所述距离维迭代计算次数和多普勒维迭代次数相同。
[0088]
较佳的,所述距离维迭代计算次数和多普勒维迭代次数为8次。
[0089]
一种基于二维匹配滤波结果的旁瓣抑制方法,包括如下步骤:
[0090]
步骤1:建立目标回波信号模型,对回波信号进行二维匹配滤波处理,具体方法如下:
[0091]
假设脉冲雷达共发射m个脉冲,脉内采样点数为n,脉冲采样向量可以表示为:
[0092]
s=[s
1 s2ꢀ…ꢀ
sn]
t
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0093]
其中,sn表示发射信号的第n个采样点;雷达接收到的第m个脉冲的第l个采样单元对 应的n个连续采样向量ym(l)=[ym(l) ym(l+1)
ꢀ…ꢀ
ym(l+n-1)]
t
可以表示为:
[0094][0095]
其中,y(l)中各元素表示回波信号的各个采样点;m=1,2,...,m;g是一个 n
×
(2n-1)维的发射信号矩阵,l表示距离单元数,k表示多普勒单元数,x表示l
×
k 维的距离-多普勒像,x(l)是x中第l行向量的前n-1到后n-1行向量组成的子矩阵,是 (2n-1)
×
k维的x的子矩阵;f是m
×
k维的多普勒矩阵,表示矩阵f
t
的第m列, nm(l)=[nm(l) nm(l+1)
…
nm(l+n-1)]
t
是n
×
1维的加性白噪声,各元素表示相 应位置的噪声;
[0096]
[0097][0098][0099][0100]
其中表示第p个多普勒单元对应的多普勒相移,p=1,2,...,k;
[0101]
m个脉冲的基带回波信号的第l个采样单元对应的n个连续采样矩阵可以表示为 y(l)=[y1(l) y2(l)
ꢀ…ꢀ
ym(l)],则第(l,k)个距离-多普勒单元的二维匹配滤波结果 为
[0102][0103]
其中fk表示矩阵f的第k列,n(l)=[n1(l) n2(l)
ꢀ…ꢀ
nm(l)]表示n
×
m维的噪 声矩阵,r=(shg)
t
=[r-n+1 r-n+2
ꢀ…ꢀrn-1
]
t
;
[0104]
二维匹配滤波结果表示为:
[0105][0106]
步骤2:构建距离维迭代自适应滤波器,在距离维进行迭代滤波,具体方法如下:
[0107]
对二维匹配滤波结果x
mf
按行分块,得
[0108][0109][0110]
其中,z=f
tf*
;x
mf
(1)表示x
mf
中第一行,其它以此类推;
[0111]
令:
[0112]
a=xz
[0113]
基于矩阵x和矩阵z计算得到矩阵a中各元素的值,将各元素表示为αk(l),将矩阵a 写成如下形式:
[0114][0115]
其中,a1,a2,...,ak表示矩阵a中各列;则有:
[0116][0117][0118]
a(l)表示矩阵a中第l行向量的前n-1到后n-1行向量组成的子矩阵;
[0119]
第(l,k)个距离-多普勒单元的二维匹配滤波结果可以进一步表示为:
[0120][0121]
其中:
[0122][0123]
其中,f(m,k)表示fk中的元素,也表示矩阵f的第m行、第k列元素;
[0124]
基于二维匹配滤波结果的距离维代价函数为:
[0125][0126]
其中,e[
·
]表示求期望;wk(l)表示滤波器;
[0127][0128]
其中,k
r1
和k
r2
分别表示向量中包含的位于二维匹配滤波结果x
mf
(l,k)的前、 后单元数,kr=k
r1
+k
r2
+1表示距离维迭代自适应滤波器长度;
[0129][0130]
将j(l,k)对求偏导,并令其为0,可得距离维迭代自适应滤波器系数向量为:
[0131][0132]
假设不同单元的αk(l)互不相关,噪声是均值为零、功率为σ2的高斯白噪声,αk(l)与 噪声不相关,因此求得:
[0133][0134]
其中,表示矩阵d的第k
r1
+n列;
[0135]rk,l
=dλ
k,ldh
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(21)
[0136][0137]
矩阵a的初值为a=x
mf
z;
[0138]
则求得:
[0139][0140]
根据公式(23),遍历k∈[1,k],l∈[1,l],可得αk(l)的估计值由此构成矩阵a 的估计值
[0141]
得到矩阵a的估计值后,用估计值更新矩阵a,完成距离维第一次迭代计算;
[0142]
步骤3:构建多普勒维迭代自适应滤波器,在多普勒维进行迭代滤波,具体方法如下:
[0143]
令:
[0144][0145]
其中,β1,β2,
…
,β
l
表示矩阵b中各列,β
l
(k)表示矩阵b中第l列第k行的元素;
[0146][0147]
z=[z
1 z2ꢀ…ꢀ
zk]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0148]
x
l
=[x
l
(1) x
l
(2)
ꢀ…ꢀ
x
l
(k)]
t
ꢀꢀꢀꢀꢀꢀꢀ
(27)
[0149]
则有:
[0150][0151]
基于距离维迭代结果的多普勒维代价函数为:
[0152][0153]
其中:
[0154]
[0155]
其中,k
d1
和k
d2
分别表示在向量中包含的位于β
l
(k)的前后单元数, kd=k
d1
+k
d2
+1表示多普勒维迭代自适应滤波器长度:
[0156][0157]
将对求偏导,并令其为0,可得多普勒维迭代自适应滤波器系数向量为:
[0158][0159]
假设不同单元的x
l
(k)互不相关,求得:
[0160][0161]
其中:
[0162]
q(k)=[z(k,k-k
d1
) z(k,k-k
d1
+1)
ꢀ…ꢀ
z(k,k+k
d2
)]
t
ꢀꢀꢀꢀꢀ
(34)
[0163]
z(i,j)表示矩阵z的第i行第j列的元素;
[0164][0165]
其中:
[0166][0167]
因此,多普勒维迭代自适应滤波器系数向量可以表示为:
[0168][0169]
则求得:
[0170][0171]
根据公式(38),遍历l∈[1,l],k∈[1,k],得x
l
(k)的估计值由此得到矩阵x
的 估计值完成第一次多普勒维迭代;其中,在第一次迭代时,公式(36)中的矩阵x的初 值为步骤2迭代完成输出的矩阵a的估计值;
[0172]
步骤4、利用公式(20)计算当前的wk(l),再将当前的wk(l)代入公式(23),再次得 到矩阵a的估计值完成距离维第二次迭代计算;
[0173]
用第一次迭代得到的估计值更新当前的x
l
(k),基于公式(38)利用当前的x
l
(k) 再次计算估计值完成第二次多普勒维迭代计算;
[0174]
依次类推,每次利用公式(20)完成一次距离维迭代计算后,再利用公式(38)进行一 次多普勒维迭代,经过设定次迭代后,完成距离维和多普勒维旁瓣抑制。
[0175]
较佳的,所述距离维迭代计算次数和多普勒维迭代次数为8次。
[0176]
本发明具有如下有益效果:
[0177]
本发明提出了一种基于二维匹配滤波结果的快速自适应旁瓣抑制方法,该方法首先对回波 信号进行二维匹配滤波处理,然后构建距离维迭代自适应滤波器,在距离维进行多次迭代,抑 制距离旁瓣,然后再构建多普勒维迭代自适应滤波器,在多普勒维进行多次迭代,抑制多普勒 旁瓣。该方法能够有效抑制距离-多普勒旁瓣,且具有较低的计算复杂度;
[0178]
该方法能够有效抑制二维匹配滤波结果中的距离-多普勒旁瓣,获得较好的距离-多普勒响 应,与现有方法相比,能够大幅降低计算复杂度;
[0179]
利用二维匹配滤波结果先在距离维构建迭代自适应滤波器,将作为距离维 初次迭代的先验信息,进行多次迭代,抑制距离旁瓣。再在多普勒维构建迭代自适应滤波器, 将作为多普勒维初次迭代的先验信息,进行多次迭代,抑制多普勒旁瓣。一般在距 离维和多普勒维分别进行八次迭代即可将距离-多普勒旁瓣抑制到噪声基底以下,获得准确的 距离-多普勒响应。
附图说明
[0180]
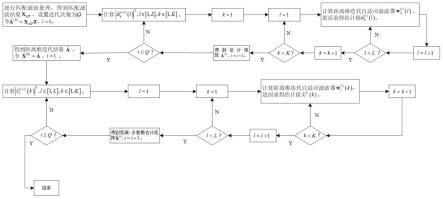
图1为本发明的方法流程图;
[0181]
图2(a)为理想距离-多普勒响应;
[0182]
图2(b)为二维匹配滤波结果;
[0183]
图2(c)为本发明所提方法的迭代结果。
具体实施方式
[0184]
下面结合附图并举实施例,对本发明进行详细描述。
[0185]
步骤1:建立目标回波信号模型,对回波信号进行二维匹配滤波处理,具体方法如下:
[0186]
假设脉冲雷达共发射m个脉冲,脉内采样点数为n,脉冲采样向量可以表示为:
[0187]
s=[s
1 s2ꢀ…ꢀ
sn]
t
ꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0188]
其中,sn表示发射信号的第n个采样点。雷达接收到的第m个脉冲的第l个采样单元
阵,r=(shg)
t
=[r-n+1 r-n+2
ꢀ…ꢀrn-1
]
t
。
[0199]
二维匹配滤波结果表示为:
[0200][0201]
步骤2:构建距离维迭代自适应滤波器,在距离维进行迭代滤波,具体方法如下:
[0202]
对二维匹配滤波结果x
mf
按行分块,得
[0203][0204][0205]
其中,z=f
tf*
;x
mf
(1)表示x
mf
中第一行,其它以此类推;
[0206]
令:
[0207]
a=xz
[0208]
基于矩阵x和矩阵z计算得到矩阵a中各元素的值,将各元素表示为αk(l),将矩阵a 写成如下形式:
[0209][0210]
其中,a1,a2,...,ak表示矩阵a中各列;则有:
[0211]
[0212][0213]
a(l)表示矩阵a中第l行向量的前n-1到后n-1行向量组成的子矩阵;
[0214]
第(l,k)个距离-多普勒单元的二维匹配滤波结果可以进一步表示为:
[0215][0216]
其中:
[0217][0218]
其中,f(m,k)表示fk中的元素,也表示矩阵f的第m行、第k列元素。
[0219]
基于二维匹配滤波结果的距离维代价函数为:
[0220][0221]
其中,e[
·
]表示求期望;wk(l)表示滤波器;
[0222][0223]
其中,k
r1
和k
r2
分别表示向量中包含的位于二维匹配滤波结果x
mf
(l,k)的前、后 单元数,kr=k
r1
+k
r2
+1表示距离维迭代自适应滤波器长度;
[0224][0225]
将j(l,k)对求偏导,并令其为0,可得距离维迭代自适应滤波器系数向量为:
[0226][0227]
假设不同单元的αk(l)互不相关,噪声是均值为零、功率为σ2的高斯白噪声,αk(l)与 噪声不相关,因此求得:
[0228][0229]
其中,表示矩阵d的第k
r1
+n列;
[0230]rk,l
=dλ
k,ldh
ꢀꢀꢀꢀꢀꢀꢀ
(21)
[0231][0232]
矩阵a的初值为a=x
mf
z;
[0233]
则求得:
[0234][0235]
根据公式(23),遍历k∈[1,k],l∈[1,l],可得αk(l)的估计值由此构成矩阵a 的估计值
[0236]
得到矩阵a的估计值后,用估计值更新矩阵a,完成距离维第一次迭代计算;利用 公式(20)计算当前的wk(l),再将当前的wk(l)代入公式(23),再次得到矩阵a的估计 值完成距离维第二次迭代计算;然后再利用公式(20)计算的当前的wk(l)的代入公式 (23)完成距离维第三次迭代,以此类推,多次迭代后即可抑制距离旁瓣。
[0237]
步骤3:构建多普勒维迭代自适应滤波器,在多普勒维进行迭代滤波,具体方法如下:
[0238]
令:
[0239][0240]
其中,β1,β2,
…
,β
l
表示矩阵b中各列,β
l
(k)表示矩阵b中第l列第k行的元素;
[0241][0242]
z=[z
1 z2ꢀ…ꢀ
zk]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(26)
[0243]
x
l
=[x
l
(1) x
l
(2)
ꢀ…ꢀ
x
l
(k)]
t
ꢀꢀꢀꢀꢀꢀꢀꢀ
(27)
[0244]
则有:
[0245][0246]
基于距离维迭代结果的多普勒维代价函数为:
[0247][0248]
其中:
[0249][0250]
其中,k
d1
和k
d2
分别表示在向量中包含的位于β
l
(k)的前后单元数, kd=k
d1
+k
d2
+1表示多普勒维迭代自适应滤波器长度:
[0251][0252]
将对求偏导,并令其为0,可得多普勒维迭代自适应滤波器系数向量为:
[0253][0254]
假设不同单元的x
l
(k)互不相关,因此求得
[0255][0256]
其中,
[0257]
q(k)=[z(k,k-k
d1
) z(k,k-k
d1
+1)
ꢀ…ꢀ
z(k,k+k
d2
)]
t
ꢀꢀꢀꢀꢀ
(34)
[0258]
z(i,j)表示矩阵z的第i行第j列的元素。
[0259][0260]
其中:
[0261]
多普勒 旁瓣。图2(a)、图2(b)和图2(c)所示分别为理想的距离-多普勒响应、二维匹配滤波 结果和该方法的迭代结果。如图所示,该方法可以有效抑制距离-多普勒旁瓣,其计算复杂度 分别比iaa、ampc、fampc方法低3个、5个、6个数量级。
[0274]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在 本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护 范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1