一种智能网联汽车试验场地设计方法与流程
1.本发明属于智能网联汽车技术领域,具体涉及一种智能网联汽车试验场地设计方法。
背景技术:
2.整车试验场地测试是获得欧盟、美国、日本等国广泛认可的智能网联汽车“多支柱”测试法之一,而且也是智能网联汽车进行实际道路测试的关键准入条件之一。智能网联汽车整车试验场地测试主要是以实车、在环及平行测试等为手段,通过在真实的场地上搭建上百个模拟及虚拟场景,最大限度减少实际道路测试带来的潜在风险。一方面,在可控的风险条件下对智能网联汽车进行最接近实际道路环境的实车试验,充分暴露自动驾驶的各种技术缺陷,确定车辆实际可靠运行的道路环境条件;另一方面可以使试验员熟悉自动驾驶的操作及紧急情况下的响应,以便能在公共道路测试时应对自如。
3.目前,智能网联汽车试验场的设计存在的缺点和不足如下:
4.仅针对单一场地功能设计,例如自动驾驶汽车试验场内出入口道闸系统,没有场地的试验道路设计;
5.仅针对试验场测试场景设计,例如直行应用场景及转向应用场景,没有试验场景相关道路的技术参数;
6.仅针对自适应巡航、车道保持及交通标志识别等自动驾驶单一测试道路设计,缺少综合考虑涵盖自动驾驶各种测试的道路需求。
7.在在传统试验场、废弃的飞机场或军事基地改造而成,场地的道路宽度及长度。
技术实现要素:
8.为了克服上述问题,本发明提供一种智能网联汽车试验场地设计方法,依据试验车速及试验危险度明确测试分区原则,通过分析智能网联汽车测试标准的道路需求量化各测试区的道路参数,是一种适用于l4级及以上,可拓展、柔性化智能网联试验场地的设计方法。
9.一种智能网联汽车试验场地设计方法,包括如下内容:
10.1.智能网联整车测试标梳理
11.a.标准范围
12.包括l2级整车先进驾驶辅助系统试验标准、l3级及其以上自动驾驶整车试验标准;
13.b.梳理内容
14.梳理测试标准内容包括测试项目、测试车速、道路要素、单向车道宽度;
15.测试项目是根据l2级整车先进驾驶辅助系统试验标准、l3级及其以上自动驾驶整车试验标准梳理的试验项目;
16.道路要素包括直道、匝道、圆弧弯道、直角弯道、十字路口及环岛;
17.单向车道宽度包括单车道、两车道及三车道;
18.2.根据梳理内容构建测试道路列表
19.a.列表内容
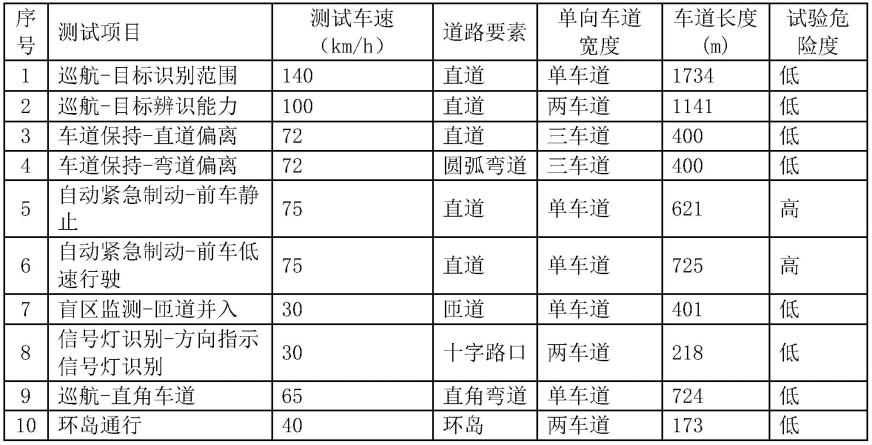
20.测试道路列表每行包含测试项目、测试车速、道路要素、单向车道宽度、车道长度、试验危险度,每列为每行内容对应的信息,其中测试车速单位为km/h,车道长度单位为m;
21.其中车道长度计算:
22.车道长度根据测试车速、测试要求及安全因素计算;
23.试验危险度的判断:
24.当自动紧急制动时,试验危险度的取值为高;否则试验危险度的取值为低;
25.3.测试场地分区
26.a.各测试区的分区依据
27.依据测试车速高低、道路要素种类及试验危险度的高低将测试场地划分为高速测试区、城市测试区及柔性测试区;
28.b.各测试区的分区规则
29.高速测试区分区规则:高速测试区的道路应符合r1或r2的测试项目的道路要求;
30.r1:测试车速大于等于70km/h且道路要素为直道,同时试验危险度为低;
31.r2:道路要素为匝道;
32.城市测试区分区规则:城市测试区的道路应符合r3和r4的测试项目的道路要求;
33.r3:测试车速小于70km/h;
34.r4:道路要素非匝道或非圆弧弯道;
35.柔性测试区分区规则:柔性测试区的道路应符合r5或r6的测试项目的道路要求;
36.r5:试验危险度为高
37.r6:道路要素为圆弧弯道
38.c.各测试区的测试道路子列表
39.根据高速测试区分区规则,从测试道路列表中提取高速测试区测试项目,创建高速测试区测试道路子列表,其结构和测试道路列表结构一致;
40.根据城市测试区分区规则,从测试道路列表中提取城市测试区测试项目,创建城市测试区测试道路子列表,其结构和测试道路列表结构一致;
41.根据柔性测试区分区规则,从测试道路列表中提取柔性测试区测试项目,创建柔性测试区测试道路子列表,其结构和测试道路列表结构一致;
42.4.计算各测试区道路技术参数
43.a.计算输入
44.各测试区测试道路子列表;
45.b.道路要素确定
46.按照各测试区测试道路子列表,统计各测试区道路要素;
47.c.高速测试区道路技术参数设计
48.step1:根据道路要素提取高速测试区直道的单向车道宽度及车道长度,匝道的单向车道宽度及车道长度;
49.step2:统计单向车道及匝道的单向车道宽度的最大值,将直道的单向车道宽度的
最大值乘以2作为直道的车道宽度,匝道的单向车道宽度的最大值作为匝道的车道宽度;
50.step3:根据高速测试区匝道的车道长度的提取值,统计匝道车道长度的最大值,匝道车道长度至少为该最大值;
51.step4:按下式计算高速测试区直道车道长度取值y分别为400、600、800、1000、1200、1400、1600、1800及2000时的直道车道长度覆盖度f(y);
[0052][0053]
上式中:
[0054]
y表示直道车道长度取值,单位m;
[0055]ns
表示高速测试区测试道路子列表中直道长度小于或等于y的行数;
[0056]ns
表示高速测试区测试道路子列表中直道的总行数;
[0057]
setp5:根据得到的各个覆盖度和直道车道长度y的各个取值之间的对应关系,采用指数函数进行拟合得到直道车道长度y的计算函数y=a
×ebx
,其中a为364.19,b为1.6944,e为自然对数,x=f(y),为直道车道长度覆盖度;
[0058]
setp6:根据测试覆盖度的要求,采用直道车道长度y的计算函数计算作为实际建设车道所需的直道车道长度,并将车道长度的计算结果加上0.5后再四舍五入取整数得到高速测试区实际建设所需直道的道路长度;
[0059]
setp7:输出高速测试区道路技术参数;
[0060]
d.城市测试区道路技术参数设计
[0061]
step1:以车道长度为横轴,车道宽度为纵轴绘制散点图,根据图中散点的聚集程度确定车道宽度的统计区间i及车道长度的统计区间j;
[0062]
step2:统计城市测试区测试道路子列表中同时落在车道宽度统计区间i和车道长度统计区间j的测试项目数n
ij
,其中i=1、2、
……
、m;j=1、2、
……
、n;
[0063]
step3:按下式计算同时落在车道宽度统计区间i和车道长度统计区间j的测试项目占比k
ij
:
[0064][0065]
式中:
[0066]
nc表示城市测试区测试道路子列表的总行数;
[0067]
step4:分别按下式计算落在车道宽度统计区间i的测试项目占比k
1i
即车道宽度单独统计占比和落在车道长度统计区间j的测试项目的占比k
2j
即车道长度单独统计占比;
[0068][0069][0070]
step5:分别按下式计算城市测试区各车道宽度需求的道路基数n
1i
、各车道长度需求的道路基数n
2j
、车道宽度基数nw和车道长度基数n
x
:
[0071][0072][0073][0074][0075]
式中:int表示取整;
[0076]
min表示取最小值;
[0077]
step6:根据车道宽度基数nw和车道长度基数n
x
,应用下式计算城市测试区所需的车道基数
[0078][0079]
式中:max表示取最大值;
[0080]
step7:根据城市测试区所需的车道基数及车道宽度和车道长度联合统计测试项目占比k
ij
,应用下式计算城市测试区所需的车道数n
′
ij
和车道总数
[0081][0082][0083]
step8:设城市测试区由r条横向道路和s条纵向道路构成,且至少需要2条横向道路和2条纵向道路才能构成一封闭的矩形,因此应用下式计算城市测试区能提供的测试车道数n
″
rs
:
[0084]n″
rs
=r
×
(s-1)+(r-1)
×
s,r≥2且s≥2
[0085]
设城市测试区横向道路和纵向道路的初始值为2条,计算此时测试车道数;在此基础上先增加1条横向车道,再增加1条纵向车道,以此类推,每增加一次计算一次此时的测试车道总数,直至
[0086]
e.柔性测试区道路技术参数
[0087]
step1:统计柔性测试区测试道路子列表中圆弧弯道最大车道长度l
max
;
[0088]
step2:确定圆弧弯道最大半径r
max
;
[0089]
step3:按下式计算柔性测试区圆弧弯道的角度θ1:
[0090][0091]
step4:按下式计算柔性测试区圆弧弯道的弦长bc和弦高hc:
[0092]bc
=2r
max
sin(0.5θ1)
[0093][0094]
step5:按下式计算柔性测试区长度lh:
[0095]
lh=b
c cos(θ2)+hc*sin(θ2)
[0096]
式中:θ2表示柔性测试区角度因子,当场地的长度和宽度要求相等时,
[0097]
step6:按下式计算柔性测试区宽度lv:
[0098]
lv=b
c sin(θ2)+hc*cos(θ2)。
[0099]
所述智能网联整车测试标梳理中l2级整车先进驾驶辅助系统试验标准梳理的试验项目包括巡航、自动紧急制动(前碰撞预警)、车道保持(车道偏离预警)、限速识别、盲区监测。
[0100]
所述智能网联整车测试标梳理中l3级及其以上自动驾驶整车试验标准梳理的试验项目包括标志标线识别、信号灯识别、前车识别、障碍物识别、行人/非机动车识别、跟车行驶、超车、并道、交叉路口通行、环岛通行、自动紧急制动、人工接管及网络通讯。
[0101]
与现有技术相比,本发明的有益效果:
[0102]
1.设计效率高:由于采用测试分区设计,因此完成各测试分区道路需求设计后,可进行并行设计,提高试验场地的设计效率;
[0103]
2.场景覆盖度高:综合考虑了l2级整车先进驾驶辅助系统、l3级及其以上自动驾驶整车试验标准场景道路需求,满足国标、团标、c-ncap、iso及euro ncap等标准测试场景需求;
[0104]
3.设计成本低:依据测试标准定义了智能网联汽车试验场测试道路需求,给出了可量化的设计方法,支持试验场地的前期设计,可减少设计成本。
附图说明
[0105]
图1为本发明车道长度-车道宽度离散图。
具体实施方式
[0106]
下面结合实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
[0107]
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
[0108]
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特
征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0109]
在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或位置关系仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
[0110]
一种智能网联汽车试验场地设计方法,包括如下内容:
[0111]
1.智能网联整车测试标梳理
[0112]
a.标准范围
[0113]
包括l2级整车先进驾驶辅助系统试验标准、l3级及其以上自动驾驶整车试验标准;
[0114]
l2级整车先进驾驶辅助系统试验标准应覆盖国标、团标、c-ncap、iso及euro ncap;
[0115]
l3级及其以上自动驾驶整车试验标准以工信部发布的《智能网联汽车自动驾驶功能测试规程》及企标;
[0116]
b.梳理内容
[0117]
梳理测试标准内容包括测试项目、测试车速、道路要素、单向车道宽度;
[0118]
测试项目是根据l2级整车先进驾驶辅助系统试验标准、l3级及其以上自动驾驶整车试验标准梳理的试验项目;
[0119]
l2级整车先进驾驶辅助系统试验标准梳理的试验项目包括巡航、自动紧急制动(前碰撞预警)、车道保持(车道偏离预警)、限速识别、盲区监测;
[0120]
l3级及其以上自动驾驶整车试验标准梳理的试验项目包括标志标线识别、信号灯识别、前车识别、障碍物识别、行人/非机动车识别、跟车行驶、超车、并道、交叉路口通行、环岛通行、自动紧急制动、人工接管及网络通讯;
[0121]
c.梳理结果
[0122]
道路要素包括直道、匝道、圆弧弯道、直角弯道、十字路口及环岛;
[0123]
单向车道宽度包括单车道、两车道及三车道;
[0124]
2.根据梳理内容构建测试道路列表
[0125]
a.列表内容
[0126]
测试道路列表每行包含测试项目、测试车速、道路要素、单向车道宽度、车道长度、试验危险度,每列为每行内容对应的信息,其中测试车速单位为km/h,车道长度单位为m;
[0127]
其中车道长度计算:
[0128]
车道长度根据测试车速、测试要求及安全因素计算(该计算方法为现有技术,在专利号为:cn202010109431.7,专利名称为《一种智能网联汽车试验场道路长度需求预估方法》的专利中详细说明);
[0129]
试验危险度的判断:
[0130]
当自动紧急制动(前碰撞预警)时,试验危险度的取值为高;否则试验危险度的取值为低;
[0131]
测试道路列表部分结果详见表1:
[0132]
表1测试道路列表
[0133][0134]
3.测试场地分区
[0135]
a.各测试区的分区依据
[0136]
依据测试车速高低、道路要素种类及试验危险度的高低将测试场地划分为高速测试区、城市测试区及柔性测试区;
[0137]
b.各测试区的分区规则
[0138]
高速测试区分区规则:高速测试区的道路应符合r1或r2的测试项目的道路要求;
[0139]
r1:测试车速大于等于70km/h且道路要素为直道,同时试验危险度为低;
[0140]
r2:道路要素为匝道;
[0141]
城市测试区分区规则:城市测试区的道路应符合r3和r4的测试项目的道路要求;
[0142]
r3:测试车速小于70km/h;
[0143]
r4:道路要素非匝道或非圆弧弯道;
[0144]
柔性测试区分区规则:柔性测试区的道路应符合r5或r6的测试项目的道路要求;
[0145]
r5:试验危险度为高
[0146]
r6:道路要素为圆弧弯道
[0147]
c.各测试区的测试道路子列表
[0148]
根据高速测试区分区规则,从测试道路列表中提取高速测试区测试项目,创建高速测试区测试道路子列表,其结构和测试道路列表结构一致;见表2;
[0149]
表2高速测试区测试道路子列表部分结果
[0150][0151]
根据城市测试区分区规则,从测试道路列表中提取城市测试区测试项目,创建城市测试区测试道路子列表,其结构和测试道路列表结构一致;见表3;
[0152]
表3城市测试区测试道路子列表部分结果
[0153][0154]
根据柔性测试区分区规则,从测试道路列表中提取柔性测试区测试项目,创建柔性测试区测试道路子列表,其结构和测试道路列表结构一致;见表4;
[0155]
表4柔性测试区测试道路子列表部分结果
[0156][0157]
4.计算各测试区道路技术参数
[0158]
a.计算输入
[0159]
各测试区测试道路子列表
[0160]
b.道路要素确定
[0161]
按照各测试区测试道路子列表,统计各测试区道路要素,详见表5。
[0162]
表5测试道路要素统计结果
[0163][0164][0165]
c.高速测试区道路技术参数设计
[0166]
step1:根据道路要素提取高速测试区直道的单向车道宽度及车道长度,匝道的单向车道宽度及车道长度;
[0167]
step2:根据高速测试区直道的单向车道宽度的提取值及匝道的单向车道宽度的提取值,分别统计单向车道及匝道的单向车道宽度的最大值,其中直道的单向车道宽度的最大值为三车道,匝道的单向车道宽度的最大值为单车道;将直道的单向车道宽度的最大值乘以2作为直道的车道宽度,匝道的单向车道宽度的最大值作为匝道的车道宽度,因此确定高速测试区直道车道宽度至少为六车道,匝道车道宽度至少为单车道;
[0168]
step3:根据高速测试区匝道的车道长度的提取值,统计匝道车道长度的最大值,匝道车道长度至少为该最大值,具体的:由表6所知,匝道车道长度统计的最大值为484m,因此匝道车道长度至少484m;
[0169]
表6高速测试区匝道道路列表部分结果
[0170][0171]
step4:按下式计算高速测试区直道车道长度取值y分别为400、600、800、1000、1200、1400、1600、1800及2000时的直道车道长度覆盖度计算函数f(y);
[0172][0173]
上式中:
[0174]
y表示直道车道长度取值,单位m;
[0175]ns
表示高速测试区测试道路子列表中直道长度小于或等于y的行数;
[0176]ns
表示高速测试区测试道路子列表中直道的总行数;
[0177]
step4:根据直道车道长度取值范围确定车道长度取值y,实际y分别取400、600、800、1000、1200、1400、1600、1800及2000;
[0178]
step5:统计高速测试区测试道路子列表中直道的总行数ns;
[0179]
setp6:分别统计高速测试区测试道路子列表直道车道长度小于等于每个取值x的行数ns;
[0180]
setp7:将step5和setp6的计算结果代入公式f(y)中,计算直道车道长度各取值y
的覆盖度,将计算结果填入表7;
[0181]
表7高速测试区直道道路长度统计结果
[0182]
覆盖度x0.0769230.2307690.50.6153850.7307690.8076920.8461540.9230771车道长度y400600800100012001400160018002000
[0183]
setp8:根据表5中得到的各个覆盖度和直道车道长度y的各个取值之间的对应关系,采用指数函数进行拟合得到直道车道长度y的计算函数y=a
×ebx
,其中a为364.19,b为1.6944,e为自然对数,x=f(y),为直道车道长度覆盖度;
[0184]
setp9:根据测试覆盖度的要求,采用直道车道长度y的计算函数计算作为实际建设车道所需的直道车道长度,并将车道长度的计算结果加上0.5后再四舍五入取整数得到高速测试区实际建设所需直道的道路长度;
[0185]
如果测试覆盖度要求80%,采用直道车道长度y的计算函数计算,并将计算结果加0.5后四舍五入圆整可得高速测试区直道的道路长度为1413m,因此车道长度至少为1413m;如果测试覆盖度要求90%,采用直道车道长度y的计算函数计算,并将计算结果加0.5后四舍五入圆整可得高速测试区直道的道路长度为1674m,因此车道长度至少为1674m;如果测试覆盖度要求100%,采用直道车道长度y的计算函数计算,并将计算结果加0.5后四舍五入圆整可得高速测试区直道的道路长度为1983m,因此车道长度至少为1983m;
[0186]
setp10:输出高速测试区道路技术参数,详见表8。
[0187]
表8高速测试区道路技术参数
[0188][0189]
d.城市测试区道路技术参数设计
[0190]
step1:以车道长度为横轴,车道宽度为纵轴绘制散点图,其中1表示单车道、2表示双车道、3表示三车道、
……
、k表示k车道,每个点都表示一个测试项目;根据图1中散点的聚集程度确定车道宽度的统计区间i及车道长度的统计区间j,其中车道宽度的统计区间1、统计区间2、
……
、统计区间i、
……
、统计区间m,分别对应单车道、双车道、三车道
……
、i车道、
……
、m车道,车道长度的统计区间1、统计区间2、
……
、统计区间j、
……
、统计区间n,分别对应0《y≤y1、y1《y≤y2、y2《y≤y3、
……
、y2《y≤yj、
……yn-1
《y≤yn;
[0191]
依据实际数据绘制散点图,如图1所示,根据图中散点的聚集程度确定车道宽度的统计区间1、、统计区间2、统计区间3分别对应单车道、双车道及三车道,车道长度的统计区间1、统计区间2、统计区间3分别对应0《y≤300m、300m《y≤500m、500m《y≤700m。
[0192]
step2:统计城市测试区测试道路子列表中同时落在车道宽度统计区间i和车道长度统计区间j的测试项目数n
ij
,其中i=1、2、
……
、m;j=1、2、
……
、n;
[0193]
实际数据的统计结果详见表9。
[0194]
表9城市测试区测试项目统计结果
[0195][0196][0197]
step3:按下式计算同时落在车道宽度统计区间i和车道长度统计区间j的测试项目占比k
ij
,计算公式详见(2)式:
[0198][0199]
式中:
[0200]
nc表示城市测试区测试道路子列表的总行数;
[0201]
根据表5中的统计结果及实际数据城市测试区测试道路子列表的总行数nc=49,应用(2)式计算同时落在车道宽度统计区间i和车道长度统计区间j的测试项目占比k
ij
,计算结果详见表10。
[0202]
表10城市测试区车道车道宽度和车道长度联合统计结果
[0203][0204]
step4:根据车道宽度和车道长度联合统计测试项目占比k
ij
,应用(3)式和(4)式计算落在车道宽度统计区间i的测试项目占比k
1i
即车道宽度单独统计占比和落在车道长度统计区间j的测试项目的占比k
2j
即车道长度单独统计占比;
[0205][0206][0207]
结果详见表9。
[0208]
表9城市测试区车道车道宽度和车道长度单独统计结果
[0209]
[0210][0211]
step5:先根据车道宽度单独统计占比k
1i
和车道长度单独统计占比k
2j
,应用(5)式和(6)式分别计算城市测试区各车道宽度需求的道路基数n
1i
和各车道长度需求的道路基数n
2j
,然后应用(7)式和(8)式分别计算车道宽度基数nw和车道长度基数n
x
:
[0212][0213][0214][0215][0216]
式中:int表示取整;
[0217]
min表示取最小值;
[0218]
计算结果详见表10。
[0219]
表10城市测试区车道基数计算结果
[0220][0221][0222]
step6:根据车道宽度基数nw和车道长度基数n
x
,应用下式(9)计算城市测试区所需的车道基数
[0223][0224]
式中:max表示取最大值;
[0225]
其中车道基数
[0226]
step7:根据城市测试区所需的车道基数及车道宽度和车道长度联合统计测试项目占比k
ij
,应用下式(10)和(11)分别计算城市测试区所需的车道数n
′
ij
和车道总数
[0227][0228][0229]
先将车道长度y统计区间的上边界y1、y2、y3、
……
、yn作为该区间表示的道路长度,然后根据(10)式的计算结果可确定城市测试区不同车道长度及宽度所需的车道数,最后根据(11)式的计算结果可确定城市测试区所需的车道总数。
[0230]
根据城市测试区所需的车道基数及表6中的车道宽度和车道长度联合统计结果,先应用(10)式计算城市测试区所需车道数,计算结果详见表11,最后应用(11)式计算城市测试区所需车道总数
[0231]
表11城市测试区所需车道数计算结果
[0232][0233][0234]
先根据车道长度统计区间的上边界可确定每个区间表示的车道长度分别为300m、500m及700m,然后根据表11的计算结果可确定城市测试区300m单车道至少需要4条,500m单车道至少需要4条,700米单车道至少需要3条;300m双车道至少需要3条,500m双车道至少需要5条,700m双车道至少需要1条;300米单车道至少需要1条,500米双车道至少需要1条,700米三车道至少需要1条;城市测试区所需车道总数
[0235]
step8:设城市测试区由r条横向道路和s条纵向道路构成,且至少需要2条横向道路和2条纵向道路才能构成一封闭的矩形,因此应用下式(12)计算该城市测试区能提供的测试车道数n
″
rs
[0236]n″
rs
=r
×
(s-1)+(r-1)
×
s,r≥2且s≥2
ꢀꢀꢀꢀꢀꢀꢀ
(12)
[0237]
设城市测试区横向道路和纵向道路的初始值为2条,应用11式计算此时测试车道数;在此基础上先增加1条横向车道,再增加1条纵向车道,以此类推,每增加一次应用(12)式计算一次此时的测试车道总数,直至
[0238]
具体计算结果详见表12,根据该表可确定城市测试区横向车道至少4条、纵向车道至少4条。
[0239]
表12测试车道总数计算结果
[0240][0241]
e.柔性测试区道路技术参数
[0242]
step1:统计柔性测试区测试道路子列表中圆弧弯道最大车道长度l
max
;
[0243]
根据实际数据,圆弧弯道最大车道长度l
max
=818m;
[0244]
step2:确定圆弧弯道最大半径r
max
;
[0245]
根据实际数据,圆弧弯道的半径分别为125m,250m,500m,因此圆弧弯道最大半径r
max
=500m;
[0246]
step3:按下式计算柔性测试区圆弧弯道的角度θ1,详见式(13):
[0247][0248]
根据圆弧弯道最大车道长度l
max
=818m和最大半径r
max
=500m,应用式(13)计算圆弧弯道的角度θ1=1.636
[0249]
step4:按下式计算柔性测试区圆弧弯道的弦长bc和弦高hc,详见式(14)和(15):
[0250]bc
=2r
max
sin(0.5θ1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(14)
[0251][0252]
根据圆弧弯道最大半径r
max
=500m,圆弧弯道的角度θ1=1.636,应用式(14)计算圆弧弯道的弦长bc=730m。
[0253]
根据圆弧弯道最大半径r
max
=500m,圆弧弯道的弦长bc=729.8m,应用式(15)计算圆弧弯道的弦高hc=388m。
[0254]
step5:按下式计算柔性测试区长度lh,详见式(16):
[0255]
lh=bccos(θ2)+hc*sin(θ2)
ꢀꢀꢀꢀꢀꢀꢀ
(16)
[0256]
式(16)中:θ2表示柔性测试区角度因子,根据场地要求的长宽比确定,当场地的长度和宽度要求相等时,
[0257]
根据圆弧弯道的弦长bc=730m、弦高hc=388m及角度因子应用(16)式计算柔性测试区长度lh=790m。
[0258]
step6:按下式计算柔性测试区宽度lv,详见式(17):
[0259]
lv=b
c sin(θ2)+hc*cos(θ2)
ꢀꢀꢀꢀꢀꢀꢀꢀ
(17)
[0260]
根据圆弧弯道的弦长bc=730m、弦高hc=388m及角度因子应用(17)式计算柔性测试区长度lv=790m。
[0261]
以上详细描述了本发明的优选实施方式,但是,本发明的保护范围并不局限于上述实施方式中的具体细节,在本发明的技术构思范围内,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,这些简单变型均属于本发明的保护范围。
[0262]
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本发明对各种可能的组合方式不再另行说明。
[0263]
此外,本发明的各种不同的实施方式之间也可以进行任意组合,只要其不违背本发明的思想,其同样应当视为本发明所公开的内容。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1