一种满足HUD精度要求的风挡玻璃检测优化方法与流程
一种满足hud精度要求的风挡玻璃检测优化方法
技术领域
1.本发明属于hud风挡玻璃检测技术领域,具体涉及一种满足hud精度要求的风挡玻璃检测优化方法。
背景技术:
2.随着汽车科技感提升,越来越多的汽车开始配置hud即平视显示系统,它的作用就是把时速、导航等重要的行车信息投影到驾驶员前面的风挡玻璃上,让驾驶员尽量做到不低头、不转头就能看到时速、导航等重要的驾驶信息。hud技术的出现对玻璃表面造型的要求越来越高,如玻璃型面曲率不满足要求,hud会出现成像重影、旋转、突变等显示问题。
3.中国发明专利申请(申请公布号cn112595257a、申请公布日2021.4.2)公开了一种用于hud显示的风挡玻璃型面检测方法,建模仿真—搭建测试环境—图像源预处理—图像获取—图像对比—面型判定;通过图像获取装置捕捉的图像与理论图像进行对比,输出通过所测风挡玻璃反射进入人眼所视位置的图像与理论图像差异,从而判定所测风挡玻璃是否可满足hud显示要求,其实质是通过仿真方式通过对图像的差异分析判断玻璃型面是否符合hud投射质量。但需要hud详细设计初步完成,具备详细数据及光路数据后进行仿真分析,仿真建模及分析周期长,使得玻璃型面质量确认滞后。
技术实现要素:
4.本发明的目的在于针对上述技术缺陷,提供一种分析周期短、保证玻璃型面质量不滞后的满足hud精度要求的风挡玻璃检测优化方法。
5.为实现上述目的,本发明所涉及的一种满足hud精度要求的风挡玻璃检测优化方法具体如下:
6.1)建立hud风挡玻璃的检测基准面;
7.2)在检测基准面上确定检测区域基准平面和基准点;
8.3)确定hud风挡玻璃检测区域和检测点:
9.将检测区域基准平面正投影到风挡玻璃上获得hud风挡玻璃检测区域,将所有基准点正投影到风挡玻璃上得到检测点;
10.4)测量hud风挡玻璃检测区域的曲率:
11.测每个检测点的曲率半径最小值rmin和曲率半径最大值rmax;
12.5)计算并优化
13.根据获得的曲率半径最小值rmin和曲率半径最大值rmax与设定值进行比较并调整风挡玻璃的曲率半径。
14.进一步地,根据获得的曲率半径最小值rmin和曲率半径最大值rmax与设定值进行比较并调整风挡玻璃的曲率半径具体过程为:
15.5a)计算曲率半径最小值的平均值即rmin平均值,若rmin平均值≥第一设定值,则执行步骤5c),若rmin平均值<第一设定值,则执行步骤5b);
16.5b)沿曲率半径最小值的方向增加风挡玻璃的曲率半径,然后跳转至步骤4);
17.5c)计算曲率半径最大值的平均值即rmax平均值,若rmax平均值≥第二设定值,则执行步骤5e),若rmax平均值<第二设定值,则执行步骤5d);
18.5d)沿曲率半径最大值的方向增加风挡玻璃的曲率半径,然后跳转至步骤4);
19.5e)若rmax平均值/rmin平均值=第三设定范围,则执行步骤5h);若rmax平均值/rmin平均值<第三设定范围的最下限,则执行步骤5f);若rmax平均值/rmin平均值>第三设定范围的最上线,则执行步骤5g);
20.5f)沿曲率半径最大值的方向增加风挡玻璃的曲率半径,且逐步增大曲率半径,每增加一次跳转至步骤4);
21.5g)沿曲率半径最小值的方向增加风挡玻璃的曲率半径,且逐步增加曲率半径,每增加一次跳转至步骤4);
22.5h)计算曲率半径最大值的绝对偏差率即rmax绝对偏差率,若rmax绝对偏差率≤第四设定值,则执行步骤5j),若rmax绝对偏差率>第四设定值,则执行步骤5i);
23.5i)比较hud风挡玻璃检测区域沿曲率半径最大值方向的两条边界曲率半径最大值,取其中边界曲率半径最大值小的一个作为参考量,按照参考量的3~5%沿曲率半径最大值的方向逐步增加风挡玻璃的曲率半径,每增加一次跳转至步骤4);
24.5j)计算曲率半径最小值的绝对偏差率即rmin绝对偏差率,若rmin绝对偏差率≤第五设定值,则检测优化完成,若rmin绝对偏差率>第五设定值,则执行步骤5k);
25.5k)比较hud风挡玻璃检测区域沿曲率半径最小值方向的两条边界曲率半径最小值,取其中边界曲率半径最小值小的一个作为参考量,按照参考量的3~5%沿曲率半径最小值的方向逐步增加风挡玻璃的曲率半径,每增加一次跳转至步骤4)。
26.进一步地,所述步骤1)中建立hud风挡玻璃的检测基准面具体过程为:
27.1a)以r点所在的xz平面为人眼对称面,r点为座椅参考点,x、z为整车坐标系的x轴、z轴;
28.1b)在人眼对称面上,过v0点做下视线,下视线与x轴的角度为hud设计角,v0点为上眼点v1和下眼点v2之间的中间眼点;下视线与风挡玻璃相交的点为o点,通过o点做风挡玻璃的相切基准面,相切基准面即为检测基准面。
29.进一步地,所述步骤2)中在检测基准面上确定检测区域基准平面和基准点的具体过程为:
30.在检测基准面上做正方形,然后将正方形等分成n
×
n的方格确定检测区域基准平面,3≤n≤8,且正方形的中心点为o点,正方形的一边与下视线垂直;
31.在每个方格上取两个基准点共获取2n2个基准点,且每个方格上两个基准点的连线过方格的中心点,所有方格上两个基准点的连线同向,同时,每个基准点到该基准点所在方格上呈垂直的两条边的距离相等。
32.进一步地,所述步骤5b)中,增加的曲率半径=(第一设定值-rmin平均值)+100~200mm。
33.进一步地,所述步骤5d)中,增加的曲率半径=(第二设定值-rmax平均值)+100~200mm。
34.进一步地,所述步骤5f)中,按照rmax平均值
×
(3~5%)的增加量逐步增大曲率半
径,每增加一次跳转至步骤4)。
35.进一步地,所述步骤5g)中,按照rmin平均值
×
(3~5%)的增加量逐步增加曲率半径,每增加一次跳转至步骤4)。
36.进一步地,所述rmax绝对偏差率=rmax绝对偏差值
×
100%/rmax平均值;rmin绝对偏差率=rmin绝对偏差值
×
100%/rmin平均值;
37.其中:rmax绝对偏差值=[(rmax-1-rmax平均值)+(rmax-2-rmax平均值)+
……
+(rmax-2n
2-rmax平均值)]/2n2[0038]
rmin绝对偏差值=[(rmin-1-rmin平均值)+(rmin-2-rmin平均值)+
……
+(rmin-2n
2-rmin平均值)]/2n2。
[0039]
与现有技术相比,本发明具有以下优点:本发明在初版造型出来后即可进行分析,分析周期短,分析确认ok后就可以锁定玻璃型面数据,从而保证了整车造型大面数据的锁定节点。
附图说明
[0040]
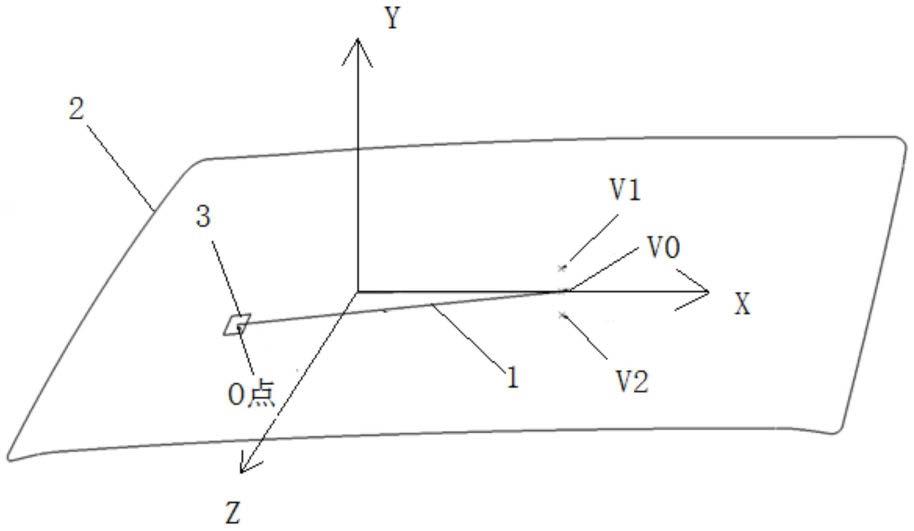
图1为本发明确定检测基准面的示意图。
具体实施方式
[0041]
下面结合具体实施例对本发明作进一步详细的描述,以便本领域技术人员理解。先简单阐述两个技术名词如下:
[0042]
r点:座椅参考点,由车辆制造上为每一乘坐位置规定的设计点,相对于三位坐标系来确定。
[0043]
v点:在乘员舱内,通过前排外侧乘坐位置中心线的纵向铅锤平面,与r点位置相关,此点用于检查汽车视野是否符合要求。
[0044]
本发明满足hud精度要求的风挡玻璃检测优化方法具体过程如下:
[0045]
1)建立hud风挡玻璃的检测基准面
[0046]
1a)以r点所在的xz平面为人眼对称面,r点为座椅参考点,x、z为整车坐标系的x轴、z轴;
[0047]
1b)在人眼对称面上,过v0点做下视线1,下视线1与x轴的角度为hud设计角,v0点为上眼点v1和下眼点v2之间的中间眼点;下视线与风挡玻璃2相交的点为o点,通过o点做风挡玻璃2的相切基准面,相切基准面即为检测基准面3,如图1所示;
[0048]
2)在检测基准面上确定检测区域基准平面和基准点
[0049]
在检测基准面上做正方形(如30mm
×
30mm),然后将正方形等分成n
×
n(如4
×
4)的方格确定检测区域基准平面,3≤n≤8,且正方形的中心点为o点,正方形的一边与下视线垂直;
[0050]
在每个方格上取两个基准点共获取2n2(如16)个基准点,且每个方格上两个基准点的连线过方格的中心点,所有方格上两个基准点的连线同向,同时,每个基准点到该基准点所在方格上呈垂直的两条边的距离相等(如10mm);
[0051]
3)确定hud风挡玻璃检测区域和检测点
[0052]
将检测区域基准平面正投影到风挡玻璃上获得hud风挡玻璃检测区域,将所有基
准点正投影到风挡玻璃上得到2n2个检测点;
[0053]
4)测量hud风挡玻璃检测区域的曲率
[0054]
测每个检测点的曲率半径最小值rmin和曲率半径最大值rmax,即rmin-1、rmin-2、
……
、rmin-2n2,rmax-1、rmax-2、
……
、rmax-2n2;
[0055]
5)计算并优化
[0056]
5a)计算曲率半径最小值的平均值即rmin平均值,若rmin平均值≥第一设定值3000mm,则执行步骤5c),若rmin平均值<第一设定值3000mm,则执行步骤5b);
[0057]
5b)沿曲率半径最小值的方向增加风挡玻璃的曲率半径,然后跳转至步骤4);增加的曲率半径=(3000-rmin平均值)+100~200mm;
[0058]
5c)计算曲率半径最大值的平均值即rmax平均值,若rmax平均值≥第二设定值6000mm,则执行步骤5e),若rmax平均值<第二设定值6000mm,则执行步骤5d);
[0059]
5d)沿曲率半径最大值的方向增加风挡玻璃的曲率半径,然后跳转至步骤4);增加的曲率半径=(6000-rmax平均值)+100~200mm;
[0060]
5e)若rmax平均值/rmin平均值=第三设定范围5,则执行步骤5h);若rmax平均值/rmin平均值<1.5,则执行步骤5f);若rmax平均值/rmin平均值>2.5,则执行步骤5g);
[0061]
5f)沿曲率半径最大值的方向增加风挡玻璃的曲率半径,按照rmax平均值
×
(3~5%)的增加量逐步增大曲率半径,每增加一次跳转至步骤4);
[0062]
5g)沿曲率半径最小值的方向增加风挡玻璃的曲率半径,按照rmin平均值
×
(3~5%)的增加量逐步增加曲率半径,每增加一次跳转至步骤4);
[0063]
5h)计算曲率半径最大值的绝对偏差率即rmax绝对偏差率,若rmax绝对偏差率≤第四设定值3%,则执行步骤5j),若rmax绝对偏差率>第四设定值3%,则执行步骤5i);
[0064]
5i)比较hud风挡玻璃检测区域沿曲率半径最大值方向的两条边界曲率半径最大值,取其中边界曲率半径最大值小的一个作为参考量,按照参考量的3~5%沿曲率半径最大值的方向逐步增加风挡玻璃的曲率半径,每增加一次跳转至步骤4);
[0065]
5j)计算曲率半径最小值的绝对偏差率即rmin绝对偏差率,若rmin绝对偏差率≤第五设定值3%,则检测优化完成,若rmin绝对偏差率>第五设定值3%,则执行步骤5k);
[0066]
5k)比较hud风挡玻璃检测区域沿曲率半径最小值方向的两条边界曲率半径最小值,取其中边界曲率半径最小值小的一个作为参考量,按照参考量的3~5%沿曲率半径最小值的方向逐步增加风挡玻璃的曲率半径,每增加一次跳转至步骤4)。
[0067]
上述中:
[0068]
rmax绝对偏差率=rmax绝对偏差值
×
100%/rmax平均值
[0069]
rmin绝对偏差率=rmin绝对偏差值
×
100%/rmin平均值
[0070]
rmax绝对偏差值=[(rmax-1-rmax平均值)+(rmax-2-rmax平均值)+
……
+(rmax-2n
2-rmax平均值)]/2n2[0071]
rmin绝对偏差值=[(rmin-1-rmin平均值)+(rmin-2-rmin平均值)+
……
+(rmin-2n
2-rmin平均值)]/2n2[0072]
通过本发明检测方法检测玻璃型面,可以提前识别玻璃型面能否满足hud显示精度要求;并提供了玻璃型面的优化方法,利用本发明优化方法对检查出来的不满足项进行逐步优化,直至满足相应要求,以达到满足hud显示精度的玻璃型面曲率要求,避免后期实
物样件出来后,发生因为玻璃型面不满足要求而产生的显示质量不合格等问题,进而更改玻璃型面而产生周期及成本代价。
[0073]
现有的仿真分析可确认玻璃型面能否满足hud现实精度,但仿真分析周期长,仅能分析是否满足hud显示要求,无明确的仿真优化方法,存在反复更改,反复确认。本发明在初版造型出来后即可进行分析,分析周期短,分析确认ok后就可以锁定玻璃型面数据,从而保证了整车造型大面数据的锁定节点。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1