探测器高光性能的评估系统及评估方法
1.本发明涉及一种探测器高光性能的评估方法,具体涉及一种航天应用的探测器高光性能的评估系统及评估方法。
背景技术:
2.对地观测的空间遥感探测器,可能遇到云、玻璃或者金属屋顶等高亮反射目标而出现局部区域局部时间内累计过量的电荷而出现异常图像,有可能在高亮目标消失后探测器还不能立即恢复正常而影响对非高亮目标的观测效率。采用传统的基于积分球的辐射定标方法,对探测器的辐射性能进行检测,当入射光能量增加到所有探测器都饱和,进一步增加光强后图像是否还会出现异常,无法检测出,需要新方法进行探测器高光性能检测。
技术实现要素:
3.本发明为解决现有方法进行高光性能检测过程中,当入射光能量增加到所有探测器都饱和时,进一步增加光强后无法检测出图像是否出现异常的问题,提供一种探测器高光性能的评估系统及评估方法。
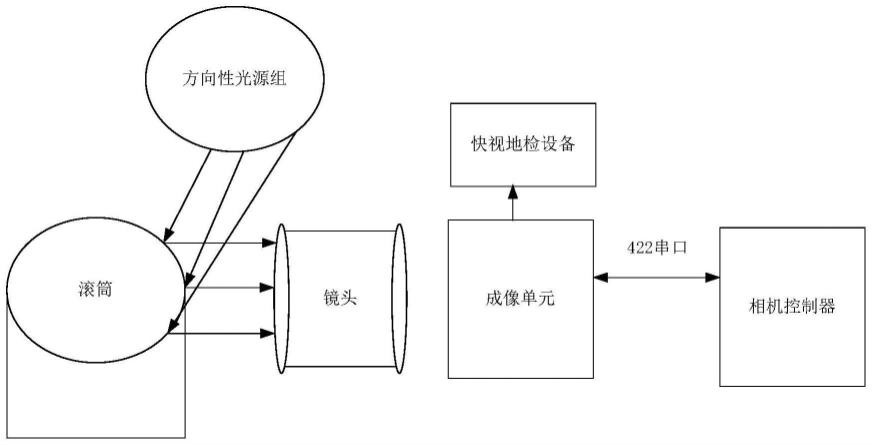
4.探测器高光性能的评估系统,该系统包括镜头,成像单元,快视地检设备和相机控制器;还包括滚筒和方向性光源组;
5.与所述成像单元匹配的镜头光轴与滚筒中轴垂直,方向性光源组分布在成像单元的侧方,其照明的区域覆盖镜头与滚筒相对的镜头中轴位置;
6.所述方向性光源组输出的可调节光,照射到能够双向转动的滚筒上,所述滚筒上的目标图案经镜头后,投射到探测器的成像单元;所述相机控制器经422串口对成像单元进行成像参数的设置和摄像开始与结束的控制;所述成像单元输出的图像,传送至快视地检设备进行解析处理,进行最佳调焦位置和最佳行频的判定。
7.探测器高光性能的评估方法,该评估方法通过所述探测器高光性能的评估系统实现;该评估方法对获取清晰图像及进行光电性能测试两个步骤;
8.所述获取清晰图像的具体步骤为:
9.步骤一、根据目标图案的长度l,确定滚筒的半径r;
[0010][0011]
步骤二、根据探测器的最高行频,最低行频,滚筒最高转速以及最低转速确定对应的gsd值,所述gsd为滚筒上图像的分辨率;
[0012]
步骤三、根据探测器的像元尺寸a,步骤二获得的gsd值以及实验场地的距离l
lenth
,选择镜头的焦距f,滚筒的前端面与镜头中心的距离d;
[0013]
[0014]
步骤四、调整所述评估系统,获得清晰图像;具体调整过程为:
[0015]
步骤四一、调整镜头和滚筒的相对位置,使镜头光轴穿过滚筒的中心;
[0016]
步骤四二、在所述滚筒与镜头光轴的相交点的位置放置点光源,并上下移动调整镜头的焦距,使点光源产生的像点尺寸尽量小;
[0017]
步骤四三、将探测器放置在像点最小的位置,上下移动点光源,观察产生的像点是否在探测器的感光面内,实现调整测试目标图案的和探测器的相对位置;
[0018]
步骤四四、将镜头放置在六维调整架进行精细调焦,通过判断与非探测器扫描方向相同的黑白相间条形景物边缘的过渡像素个数决定最佳的焦面位置;即:δ
lm
≤δ
li
,li为各调焦位置,lm为最佳调焦位置,i的取值为整数值,δ
lm
为最佳焦面位置下非探测器扫描方向的黑白相间条形景物边缘的过渡像素个数,δ
li
为各调焦位置下非探测器扫描方向的黑白相间条形景物边缘的过渡像素个数;
[0019]
步骤四五、调节探测器的扫描方向和行频,实现探测器行频和滚筒转速的精细匹配;通过判断与扫描方向相同的黑白相间条形景物边缘的过渡像素个数决定最佳的行频值;即:δ
fm
≤δ
fi
,其中,fi为各行频值,fm为最佳行频值;δ
fi
为各调焦位置下探测器扫描方向的黑白相间条形景物边缘的过渡像素个数,δ
fm
为最佳焦面位置下探测器扫描方向的黑白相间条形景物边缘的过渡像素个数;
[0020]
进行光电性能测试的过程为:
[0021]
步骤一、滚筒上贴高反射率的白图,基于光子传递曲线进行探测器的最大满阱电荷数测试,增加入射光能量,探测器的dn值增加,图像的方差值也随之增加;当图像的方差达到不增加的临界点时,入射光能量a对应探测器的最大满阱;
[0022]
步骤二、分别采用黑白交错的横条,全黑图像中的白块和全白图像中的黑块三种图像进行成像,增加入射光能量,当出现黑块或者黑条图像中开始出现偏亮的亮条或者亮斑,即暗图像的均匀指标与之前相比偏差超过20%,则认为出现高光溢出现象,此时对应的入射光能量为高光溢出的临界值b;抗光晕能力为=b/a;
[0023]
步骤三、分别采用黑白交错的横条、全黑图像中的白块和全白图像中的黑块三种图像进行成像,增加入射光能量,当黑白边界开始出现模糊,则认为出现拖尾现象,此时对应的入射光能量为高光溢出的临界值c;抗拖尾能力为=c/a;
[0024]
步骤四、分别采用黑白交错的横条、全黑图像中的白块和全白图像中的黑块三种图像进行成像,增加入射光能量,当白块图像未达到饱和而黑块图像中开始出现亮线或者亮斑,则认为出现反向电荷积分溢出现象,此时对应的入射光能量为反向电荷积分溢出的临界值d;抗拖尾能力为=d/a。
[0025]
本发明的有益效果:
[0026]
1、本发明基于方向性光源、带黑白图案的滚筒进行探测器的高光性能评估,利用滚筒进行目标的时刻变化,从而可以进行目标亮暗分区的边界进行判断,避免使用积分球在强光目标下所有的像素均进入饱和状态,掩盖了可能出现的拖尾、高光溢出等现象;
[0027]
2、本发明通过对文字图像的清晰度判断,可以判断出图像不模糊的电荷转移的极限阈值,据此设置合理的成像参数,避免出现累计的电荷过多而出现转移效率下降,图像模糊。
[0028]
3、本发明通过对亮块图像后的暗区域图像的均匀性进行判断,可以识别出探测器
高光溢出的阈值,据此设置合理的成像参数。
附图说明
[0029]
图1为本发明所述的探测器高光性能的评估系统的原理框图;
[0030]
图2为滚筒成像示意图。
具体实施方式
[0031]
具体实施方式一、结合图1和图2说明本实施方式,探测器高光性能评估系统,如图1所示,包括滚筒、方向性光源组、镜头、成像单元、快视地检和相机控制器。方向性光源组输出的可调节光,照射到可进行双向转动的滚筒上。滚筒上的目标图案,经镜头后,投射到成像单元的探测器上。相机控制器经422串口,对成像单元进行成像参数的设置和摄像开始与结束的控制。成像单元输出的图像,送入快视地检进行解析处理。
[0032]
本实施方式中,滚筒的照明光源选用具有方向性的光源;和成像单元匹配的镜头光轴与滚筒中轴垂直;方向性光源组分布在成像单元的侧方,其照明的区域覆盖镜头与滚筒相对的镜头中轴位置;
[0033]
滚筒上可选用四种图案,包含高反射率的白图、黑白交错的横条、全黑图像中的白块、全白图像中的黑块。
[0034]
具体实施方式二、结合图1和图2说明本实施方式,探测器高光性能评估方法,该方法采用具体实施方式一所述的探测器高光性能评估系统实现。该方法通过先调整评估系统,获得清晰图像;然后进行光电性能测试的步骤实现。
[0035]
所述调整评估系统的步骤:
[0036]
步骤一、根据目标图案的长度l,确定滚筒的半径r;
[0037][0038]
步骤二、根据探测器的最高行频、最低行频、滚筒的最高转速、最低转速确定对应的gsd值;
[0039]
先根据具体的应用确定探测器垂直电荷转移的行频范围,让行频的变化范围和转速的调节范围能够匹配,实验过程中改变行频时仅需要调整转速而保持恒定焦距。
[0040]
滚筒成像要求滚动旋转的线速度与探测器上的景物对应电荷的转移速度匹配。
[0041]
滚筒前端面的线速度为:v=rw;式中r为滚筒的半径,w为滚筒的转速。
[0042]
则焦面的电荷移动速度为:式中f为镜头的焦距,d为滚筒的前端面与镜头中心的距离。
[0043]
对应探测器的行频为:式中a为探测器的像元尺寸,gsd为滚筒上图像的分辨率。
[0044]
本实施方式中,探测器的最低行频f
行频_min
、探测器的最高行频f
行频_max
、滚筒的最高转速w
max
、滚筒的最低转速w
min
的约束关系如下所示:
[0045][0046]
步骤三、根据计算的gsd值、探测器的像元尺寸a、实验场地的距离l
lenth
来选取镜头的焦距f和与滚筒的距离d;
[0047][0048]
步骤四:调整评估系统
[0049]
(1)、调整镜头和滚筒的相对位置,让镜头的光轴穿过滚筒的中心;
[0050]
(2)、在滚筒与镜头光轴的相交点位置放置点光源,并上下移动,调整镜头的焦距,让点光源产生的像点尺寸尽量小;
[0051]
(3)、将探测器放置的像点最小的位置,上下移动点光源,看产生的像点是否在探测器的感光面内,从而调整测试图案的和探测器的相对位置;
[0052]
(4)、将镜头安放在六维调整架进行精细调焦,通过判断与非扫描方向相同的黑白相间条形景物边缘的过渡像素个数来决定最佳的焦面位置;δ
lm
≤δ
li
(i的取值为整数值,li代表各调焦位置,lm代表最佳调焦位置)
[0053]
(5)调节探测器的扫描方向和行频,实现探测器行频和滚筒速度的精细匹配。通过判断与扫描方向相同的黑白相间条形景物边缘的过渡像素个数来决定最佳的行频值;δ
fm
≤δ
fi
(i的取值为整数值,fi代表各行频值,fm代表最佳行频行频值)
[0054]
通过判断圆形目标在扫描方向和扫描方向的垂直方向所占像素个数的偏差来进一步辅助判断。两方向的像素所占个数的偏差值相差最小的值,对于最佳的行频值。β
fm
≤β
fi
(i的取值为整数值,fi代表各行频值,fm代表最佳行频行频值)
[0055]
进行光电性能测试的过程为:
[0056]
首先,在滚筒上贴高反射率的白图,基于光子传递曲线进行探测器的的最大满阱电荷数测试:随着入射光能量的增加,探测器的dn值增加,图像的方差值也随之增加;当图像的方差开始不增加的临界点时的入射光能量a对应探测器的最大满阱。
[0057]
分别采用黑白交错的横条、全黑图像中的白块、全白图像中的黑块三种图像进行成像,增加入射光能量,当出现黑块或者黑条图像中开始出现偏亮的亮条或者亮斑,即暗图像的均匀指标和之前相比偏差超过20%,即认为出现了blooming现象,此时对应的入射光能量为blooming的临界值b;抗光晕能力为=b/a。
[0058]
分别采用黑白交错的横条、全黑图像中的白块、全白图像中的黑块三种图像进行成像,增加入射光能量,当黑白边界开始出现模糊(针对黑白像素边界的1个像素),即认为出现了拖尾现象,此时对应的入射光能量为blooming的临界值c;抗拖尾能力为=c/a。
[0059]
分别采用黑白交错的横条、全黑图像中的白块、全白图像中的黑块三种图像进行成像,增加入射光能量,当白块图像还未达到饱和而黑块图像中开始出现亮线或者亮斑,即认为出现了反向电荷积分溢出现象,此时对应的入射光能量为反向电荷积分溢出的临界值d;抗拖尾能力为=d/a
[0060]
本实施方式中,反向电荷积分溢出与高光溢出blooming的区别:前者是在亮区域
图像未饱和的情况下发生的,后者是在亮区域图像饱和后发生的。拖尾和高光溢出blooming,前者可能在亮区域图像未饱和的情况下发生的;后者是在亮区域图像饱和后发生的。反向电荷积分溢出和拖尾的区别在于后者是电荷的转移不完全造成的,表现出在暗区域残留的dn值与亮区域的分布对应;前者相对具有随机性,而且通常表现为具备区域出现亮线或者亮斑,而有的区域未出现。
[0061]
本实施方式中,方向性光源组采用led阵列;滚筒选用定制的双向可调速滚筒;镜头采用货架产品;成像单元采用基于线阵tdicmos探测器为基础的成像单元;相机控制器采用笔记本电脑+moxa盒;快视地检设备采用武汉卓目公司的定制产品。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1