车辆信息检测方法、车辆检测系统、存储介质和电子装置与流程
本技术涉及车辆检测,具体而言,涉及一种车辆信息检测方法、车辆检测系统、存储介质和电子装置。
背景技术:
1、为了降低货运车辆超限带来的安全隐患,可以对车辆信息进行获取,例如,采用车辆轮廓识别系统对车辆轮廓信息进行检测。上述车辆轮廓识别系统可以通过检测部件(例如,激光传感器)检测车辆的宽度、高度等信息,得到完整的车辆轮廓信息,从而判断车辆是否超宽超高。
2、相关技术中的车辆轮廓识别系统通常包括一个纵向扫描激光雷达以及两个横向扫描激光雷达,其中,纵向扫描激光雷达一般安装在头拍相机的龙门架上,用于识别车长,两个横向扫描激光雷达一般相对的安装在尾拍相机的龙门架上,用于识别车宽。由于头拍相机的龙门架与尾拍相机的龙门架的距离较远,通过纵向扫描激光雷达进行远距离检测所检测到的车长的精度较低,进而导致车辆轮廓的识别准确性较差。
3、由此可见,相关技术中的车辆信息检测方法,存在由于车长检测的精度低导致的车辆轮廓的识别准确性差的技术问题。
技术实现思路
1、本技术实施例提供了一种车辆信息检测方法、车辆检测系统、存储介质和电子装置,以至少解决相关技术中的车辆信息检测方法存在由于车长检测的精度低导致的车辆轮廓的识别准确性差的技术问题。
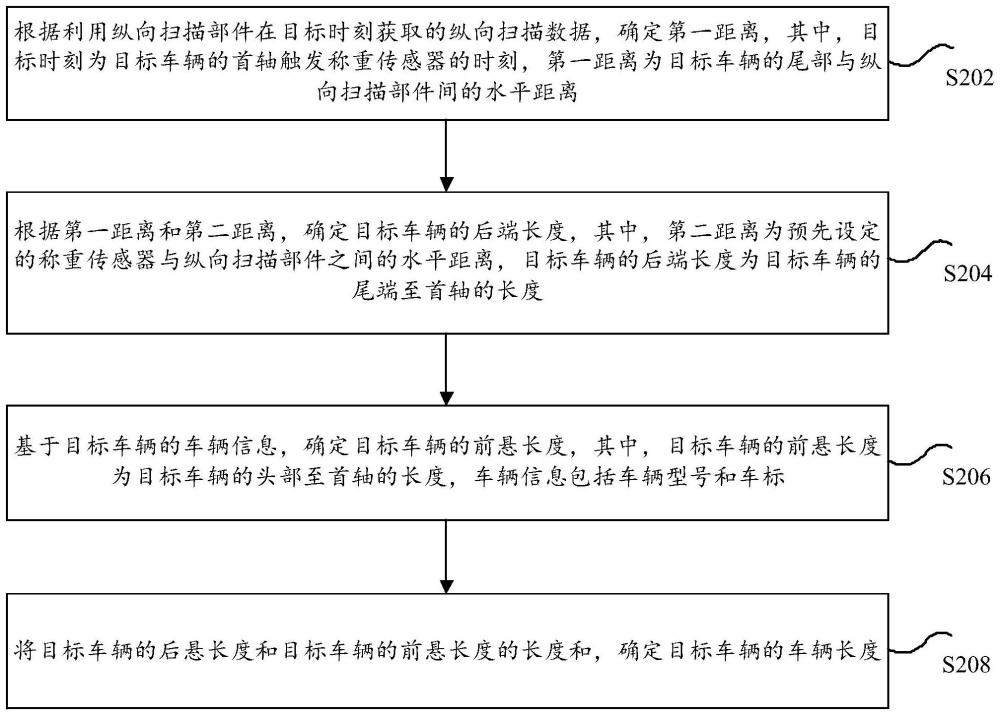
2、根据本技术实施例的一个方面,提供了一种车辆信息检测方法,包括:根据利用纵向扫描部件在目标时刻获取的纵向扫描数据,确定第一距离,其中,所述目标时刻为目标车辆的首轴触发称重传感器的时刻,所述第一距离为所述目标车辆的尾部与所述纵向扫描部件之间的水平距离;根据所述第一距离和第二距离,确定所述目标车辆的后端长度,其中,所述第二距离为预先设定的所述称重传感器与所述纵向扫描部件之间的水平距离,所述目标车辆的后端长度为所述目标车辆的尾端至所述首轴的长度;基于所述目标车辆的车辆信息,确定所述目标车辆的前悬长度,其中,所述目标车辆的前悬长度为所述目标车辆的头部至所述首轴的长度,所述车辆信息包括车辆型号和车标;将所述目标车辆的后端长度和所述目标车辆的前悬长度的长度和,确定所述目标车辆的车辆长度。
3、根据本技术实施例的另一个方面,还提供了一种车辆检测系统,包括:支撑结构;纵向扫描部件,设置于所述支撑结构上,用于对经过的目标车辆进行纵向扫描;称重传感器,设置于路面上,用于对所述目标车辆进行称重;数据处理部件,用于根据利用所述纵向扫描部件在目标时刻获取的纵向扫描数据,确定第一距离,其中,所述目标时刻为目标车辆的首轴触发所述称重传感器的时刻,所述第一距离为所述目标车辆的尾部与所述纵向扫描部件之间的水平距离;根据所述第一距离和第二距离,确定所述目标车辆的后端长度,其中,所述第二距离为预先设定的所述称重传感器与所述纵向扫描部件之间的水平距离,所述目标车辆的后端长度为所述目标车辆的尾端至所述首轴的长度;基于所述目标车辆的车辆信息,确定所述目标车辆的前悬长度,其中,所述目标车辆的前悬长度为所述目标车辆的头部至所述首轴的长度,所述车辆信息包括车辆型号和车标;将所述目标车辆的后端长度和所述目标车辆的前悬长度的长度和,确定所述目标车辆的车辆长度。
4、在一个示例性实施例中,所述数据处理部件,还用于根据所述目标车辆的车标和车辆型号,在车辆信息库中进行查找所述目标车辆的前悬长度;其中,所述车辆信息库中保存有具有对应关系的车辆信息和前悬长度。
5、在一个示例性实施例中,所述数据处理部件,还用于在所述基于所述目标车辆的车辆信息,确定所述目标车辆的前悬长度之前,利用图像采集设备获取所述目标车辆的车头图像,并基于所述车头图像获取所述目标车辆的车标。
6、在一个示例性实施例中,所述数据处理部件,还用于在所述基于所述目标车辆的车辆信息,确定所述目标车辆的前悬长度之前,利用图像采集设备获取所述目标车辆的车头图像和/或侧面图像,基于所述车头图像和/或侧面图像确定所述目标车辆的车辆型号;或者,基于所述称重传感器获取所述目标车辆的轴数和轴型,并基于所述目标车辆的轴数和轴型确定所述目标车辆的车辆型号。
7、在一个示例性实施例中,所述数据处理部件,还用于在所述根据利用纵向扫描部件在目标时刻获取的纵向扫描数据,确定第一距离之前,获取所述纵向扫描部件在多个时刻中的每个时刻扫描到的纵向扫描数据,得到一组纵向扫描数据;将所述一组纵向扫描数据中,对应的扫描时刻与所述目标时刻之间的时间差最小的纵向扫描数据,确定为所述纵向扫描部件在所述目标时刻获取的纵向扫描数据;或者,在检测到所述首轴触发所述称重传感器的情况下,触发所述纵向扫描部件对所述目标车辆进行纵向扫描,得到所述纵向扫描部件在所述目标时刻获取的纵向扫描数据。
8、在一个示例性实施例中,所述方法还包括:在一个示例性实施例中,所述车辆检测系统还包括:横向扫描部件,设置于所述支撑结构上,用于对经过的所述目标车辆进行横向扫描,得到横向扫描数据;所述数据处理部件,还用于根据所述横向扫描数据,确定所述目标车辆的车辆车宽。
9、在一个示例性实施例中,所述纵向扫描部件和所述横向扫描部件均为单线激光雷达。
10、在一个示例性实施例中,所述横向扫描部件和所述纵向扫描部件设置在同一支撑结构上。
11、根据本技术实施例的又一方面,还提供了一种计算机可读的存储介质,该计算机可读的存储介质中存储有计算机程序,其中,该计算机程序被设置为运行时执行上述车辆信息检测方法。
12、根据本技术实施例的又一方面,还提供了一种电子装置,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其中,上述处理器通过计算机程序执行上述的车辆信息检测方法。
13、在本技术实施例中,采用纵向扫描部件结合称重传感器确定车辆的候选长度、以及基于车辆信息匹配预设的车辆的前悬长度的方式,通过根据利用纵向扫描部件在目标时刻获取的纵向扫描数据,确定第一距离,其中,目标时刻为目标车辆的首轴触发称重传感器的时刻,第一距离为目标车辆的尾部与纵向扫描部件之间的水平距离;根据第一距离和第二距离,确定目标车辆的后端长度,其中,第二距离为预先设定的称重传感器与纵向扫描部件之间的水平距离,目标车辆的后端长度为目标车辆的尾端至首轴的长度;基于目标车辆的车辆信息,确定目标车辆的前悬长度,其中,目标车辆的前悬长度为目标车辆的头部至首轴的长度,车辆信息包括车辆型号和车标;将目标车辆的后端长度和目标车辆的前悬长度的长度和,确定目标车辆的车辆长度,由于在车辆的首轴触发称重传感器时检测车尾到支撑结构之间的水平距离,而支撑结构与称重传感器之间的距离是固定的,通过上述方式,可以确定出车辆的后端长度,由于利用了已有的称重传感器进行车辆长度检测,称重传感器与支撑结构之间的距离小于两个支撑结构之间的距离,可以实现提高车辆长度检测的准确性的目的,同时,基于车辆信息匹配预设的车辆的前悬长度,无需使用任一扫描部件的扫描数据计算车辆的前悬长度,可以避免检测的前悬长度和实际前悬长度的差异,实现提升车长检测的精度的目的,达到提升车辆轮廓的识别准确性的技术效果,进而解决了相关技术中的车辆信息检测方法存在由于车长检测的精度低导致的车辆轮廓的识别准确性差的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!