一种基于冲击分量概率分布度量的旋转机械状态监测方法
1.本发明涉及机械装备健康监测与智能运维领域,具体是一种基于冲击分量概率分布度量的旋转机械状态监测方法。
背景技术:
2.旋转机械装备广泛应用于国计民生的各个领域,其运行健康状况也直接决定了生产过程是否稳定和可靠。由旋转机械设备故障导致的非预期生产停车不仅会带来较大的经济损失,甚至会直接威胁人们的生命安全。因此,对旋转机械设备进行准确、灵敏的状态监测变得至关重要。
3.然而,随着旋转机械设备运行工况的日趋复杂,建立一套可靠的、能够准确反映其退化趋势的状态监测体系变得十分困难。一方面,旋转机械设备运行过程中的瞬态干扰使得传统度量指标产生剧烈波动,无法准确反映其健康状态和退化趋势;另一方面,日趋复杂的运行工况需要更加强有力的状态特征提取手段以全面刻画旋转机械设备的运行状态。
4.针对上述问题,专家学者从多个角度开展了旋转机械状态监测方法研究,并提出了多种状态监测指标体系。根据构造策略和实现方法的不同,当前状态监测指标可以分为两大类:基于统计和信号处理的监测指标、基于机器学习的监测指标。从构造方式来看,基于统计和信号处理的监测指标具有明确的物理意义,且计算较为便捷,如均方根(root mean square,rms)、峭度(kurtosis)、基尼系数(gini index)以及其他高阶统计量等,在工业领域有着广泛的应用,但是,由于该类指标只考虑了部分统计信息,对于不同退化阶段的旋转机械设备运行状态的表征能力有限,此外,该类指标受瞬态干扰的影响较大,进而导致状态监测结果产生非理想的剧烈波动;基于机器学习的监测指标克服了单一指标表征能力受限的问题,通过多源指标融合对旋转机械设备进行更为全面的状态监测,然而,机器学习相关算法还不具备良好的物理可解释性,其严苛的数据样本要求以及长耗时问题仍然需要进一步深入研究和优化。
5.通过上述分析可知,研究建立一种准确度高、鲁棒性强且具备明确物理意义的旋转机械状态监测指标体系有着十分迫切的工业应用需求和广阔的应用前景。
技术实现要素:
6.本发明的目的是提供一种基于冲击分量概率分布度量的旋转机械状态监测方法,包括以下步骤:
7.1)利用传感器采集旋转机械运行过程的振动数据。
8.2)利用回归分析方法对转机械运行过程的振动数据进行处理,得到用于刻画旋转机械振动数据冲击特性的alpha稳定分布的特征参数;
9.所述alpha稳定分布的特征参数包括特征指数α、分散系数γ、对称参数β和位置参数δ。
10.得到用于刻画旋转机械振动数据冲击特性的alpha稳定分布的特征参数的步骤包
括:
11.2.1)建立alpha稳定分布特征函数φ(t),即::
12.φ(t)=exp{jδt-γ|t|
α
·
[1+jβsgn(t)ω(t,α)]}
ꢀꢀꢀ
(1)
[0013]
式中,α为特征指数,且0<α≤2,用于表征信号冲击特性的显著程度;β为对称参数,且-1≤β≤1;δ为位置参数;γ为分散系数,且γ>0,用于表征alpha稳定分布围绕位置参数的分散程度;j为虚数单位;t为时间;
[0014]
其中,参数ω(t,α)和参数sgn(t)分别如下所示:
[0015][0016][0017]
2.2)将公式(1)转换为线性表达式,即:
[0018]
log(-log|φ(t)|2)=log(2γ)+αlog|t|
ꢀꢀꢀ
(4)
[0019]
2.3)对回归算子y(t)=log[-log|φ(t)|2]关于参数ψ(t)=log|t|进行如公式(5)所示的回归分析,从而得到特征指数α和分散系数γ的估计值;
[0020]
yk(t)=log(2γ)+αψk(t)+εkꢀꢀꢀ
(5)
[0021]
式中,εk为第k次迭代后的误差项;下标k为回归分析迭代次数;
[0022]
2.4)对回归算子z(ui)=g(ui)+πk(ui)关于实数ui和参数sgn(ui)|ui|
α
进行如公式(6)所示的回归分析,从而得到对称参数β和位置参数δ的估计值;k(ui)为关于ui的函数;
[0023][0024]
式中,ηi为第i次迭代后的误差项,ui为实数;
[0025]
其中,反正切函数g(ui)如下所示:
[0026]
g(ui)=arctan{im[φ(ui)]/re[φ(ui)]}
ꢀꢀꢀ
(7)
[0027]
式中,re[φ(ui)]和im[φ(ui)]分别为函数φ(ui)的实部和虚部。
[0028]
3)利用假设检验方法对alpha稳定分布进行拟合优度检验,若拟合优度小于假设检验显著性水平ζ,则利用参数校正方法对alpha稳定分布的特征参数进行优化,更新alpha稳定分布,并重复步骤3);若拟合优度大于等于假设检验显著性水平ζ,则进入步骤4);
[0029]
利用假设检验方法对alpha稳定分布进行拟合优度检验的步骤包括:
[0030]
3.1)根据alpha稳定分布建立假设检验,即:
[0031][0032]
式中,为采集的振动数据x的概率分布函数;为对应的由特征参数估计得到的alpha稳定分布的概率分布函数;h0和h1分别代表零假设和备择假设。
[0033]
3.2)依据alpha稳定分布进行b次数据重采样,得到样本信号序列
其中每个信号包含n个采样点;为第b次数据重采样得到的样本信号;
[0034]
3.3)建立检验统计量t(x),分别计算振动数据x与重采样信号x
*
的检验统计量数值,分别记为tr(x)和b为基于alpha稳定分布的数据重采样次数;
[0035]
3.4)计算alpha稳定分布的拟合优度即:
[0036][0037]
其中,激活函数κ(x)如下所示:
[0038][0039]
3.5)设置假设检验显著性水平ζ,判断拟合优度是否小于假设检验显著性水平ζ,若是,则利用参数校正方法对alpha稳定分布的特征参数进行优化,从而更新alpha稳定分布。依据alpha稳定分布得到的重采样信号的长度与振动数据x的长度保持一致。
[0040]
利用参数校正方法对alpha稳定分布的特征参数进行优化的步骤包括:
[0041]
3.5.1)降低参数搜索步长,并扩大参数搜索空间,从而优化回归算子y(t)=log[-log|φ(t)|2],进而对特征指数α和分散系数γ的估计值进行更新;
[0042]
3.5.2)采用与步骤1)相同的参数搜索步长和参数搜索空间优化回归算子z(ui)=g(ui)+πk(ui),进而对对称参数β和位置参数δ的估计值进行更新。
[0043]
4)设置冲击分量概率分布度量准则,将旋转机械当前时刻与初始时刻的alpha稳定分布进行对比,量化得到冲击分量概率分布的波动值;
[0044]
量化得到冲击分量概率分布的波动值的步骤包括:
[0045]
4.1)将当前时刻与初始时刻对应的alpha稳定分布通过平移变换对齐,即:
[0046]
δμ=μ
c-μ0ꢀꢀꢀ
(11)
[0047]
式中,μc和μ0分别代表当前时刻与初始时刻获得的alpha稳定分布的对称中心;δμ为中心偏移量;
[0048]
4.2)设置冲击分量概率分布度量准则f(x,h),即:
[0049][0050]
式中,h为冲击分量度量幅值边界;pc和p0分别表示当前时刻与初始时刻的概率密度函数,ε为设定的极小值。
[0051]
4.3)计算得到冲击分量概率分布的波动值θ(x,h),即:
[0052]
θ(x,h)=fc(x,h)-f0(x,h)
ꢀꢀꢀ
(13)
[0053]
式中,fc(x,h)和f0(x,h)分别为当前时刻与初始时刻的冲击概率分布函数。
[0054]
5)对旋转机械设备不同运行时刻的冲击分量概率分布波动值进行分析,判断旋转机械设备的运行状态。
[0055]
所述旋转机械设备运行状态包括正常和异常;当冲击分量概率分布的波动值θ(x,h)小于等于预设波动阈值3σ时,旋转机械设备运行状态为正常,当冲击分量概率分布的波动值θ(x,h)大于预设波动阈值3σ时,旋转机械设备运行状态为异常。
[0056]
当旋转机械设备运行状态为异常时,采用平方包络谱分析方法对旋转机械设备振动数据进行分析,对旋转机械设备运行状态进行验证。
[0057]
采用平方包络谱分析方法对异常状态监测结果进行验证的方法包括:对异常状态振动数据进行平方包络谱分析,若旋转机械设备零部件的故障特征频率及其倍频成分出现在平方包络谱中,则相应零部件出现故障。
[0058]
本发明的技术效果是毋庸置疑的,本发明的有益效果如下:
[0059]
针对旋转机械设备的运行过程,本发明提供了一种基于冲击分量概率分布度量的旋转机械状态监测方法,通过回归分析和参数校正优化策略建立alpha稳定分布模型,对旋转机械设备运行过程的统计特性进行全面准确的表征,并由此提出了一种冲击分量概率分布度量准则,对不同阶段旋转机械设备的退化状态进行量化评估。基于概率分布统计特性,本发明提供的方法能够全面、准确反映旋转机械设备的退化状态,克服了传统指标表征能力受限的问题,具备明确的物理意义;其次,该方法无需大量的数据样本进行训练,具有良好的计算效率和计算便捷性;此外,由于从总体上建立振动数据概率分布模型,该方法对瞬态干扰的鲁棒性较强。本发明的技术效果是显著的,具备良好的工程应用价值和应用前景。
附图说明
[0060]
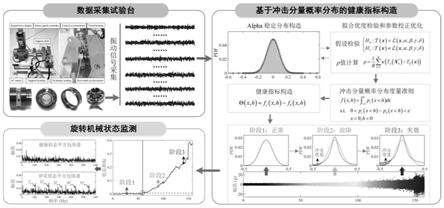
图1为本发明所述一种基于冲击分量概率分布度量的旋转机械状态监测方法执行逻辑图;
[0061]
图2为本发明实施例中滚动轴承全生命周期数据采集试验台;
[0062]
图3为本发明实施例中采集的滚动轴承振动数据时域波形;
[0063]
图4为本发明实施例中拟合优度检验结果;
[0064]
图5为本发明实施例中基于冲击分量概率分布度量的滚动轴承状态监测结果;
[0065]
图6(a)-(d)为本发明实施例中数据文件531、数据文件532、数据文件533、数据文件534的振动数据平方包络谱分析结果;
[0066]
图7(a)-(h)为本发明实施例中峭度、均方根、hoyer指数、l2/l1范数、负熵、平滑指数、基尼系数、本方法状态监测曲线对比结果;
[0067]
图8为本发明实施例中多种指标状态监测趋势性对比结果。
具体实施方式
[0068]
下面结合实施例对本发明作进一步说明,但不应该理解为本发明上述主题范围仅限于下述实施例。在不脱离本发明上述技术思想的情况下,根据本领域普通技术知识和惯用手段,做出各种替换和变更,均应包括在本发明的保护范围内。
[0069]
实施例1:
[0070]
参见图1至图8,一种基于冲击分量概率分布度量的旋转机械状态监测方法,包括以下步骤:
[0071]
1)利用传感器采集旋转机械运行过程的振动数据。
[0072]
2)利用回归分析方法对转机械运行过程的振动数据进行处理,得到用于刻画旋转机械振动数据冲击特性的alpha稳定分布的特征参数;
[0073]
所述alpha稳定分布的特征参数包括特征指数α、分散系数γ、对称参数β和位置参数δ。
[0074]
得到用于刻画旋转机械振动数据冲击特性的alpha稳定分布的特征参数的步骤包括:
[0075]
2.1)建立alpha稳定分布特征函数φ(t),即::
[0076]
φ(t)=exp{jδt-γ|t|
α
·
[1+jβsgn(t)ω(t,α)]}
ꢀꢀꢀ
(1)
[0077]
式中,α为特征指数,且0<α≤2,用于表征信号冲击特性的显著程度;β为对称参数,且-1≤β≤1;δ为位置参数;γ为分散系数,且γ>0,用于表征alpha稳定分布围绕位置参数的分散程度;j为虚数单位;t为时间;
[0078]
其中,参数ω(t,α)和参数sgn(t)分别如下所示:
[0079][0080][0081]
2.2)将公式(1)转换为线性表达式,即:
[0082]
log(-log|φ(t)|2)=log(2γ)+αlog|t|
ꢀꢀꢀ
(4)
[0083]
2.3)对回归算子y(t)=log[-log|φ(t)|2]关于参数ψ(t)=log|t|进行如公式(5)所示的回归分析,从而得到特征指数α和分散系数γ的估计值;
[0084]
yk(t)=log(2γ)+αψk(t)+εkꢀꢀꢀ
(5)
[0085]
式中,εk为第k次迭代后的误差项;下标k为回归分析迭代次数;
[0086]
2.4)对回归算子z(ui)=g(ui)+πk(ui)关于实数ui和参数sgn(ui)|ui|
α
进行如公式(6)所示的回归分析,从而得到对称参数β和位置参数δ的估计值;k(ui)为关于ui的函数;
[0087][0088]
式中,ηi为第i次迭代后的误差项,ui为实数;
[0089]
其中,反正切函数g(ui)如下所示:
[0090]
g(ui)=arctan{im[φ(ui)]/re[φ(ui)]}
ꢀꢀꢀ
(7)
[0091]
式中,re[φ(ui)]和im[φ(ui)]分别为函数φ(ui)的实部和虚部。
[0092]
3)利用假设检验方法对alpha稳定分布进行拟合优度检验,若拟合优度小于假设检验显著性水平ζ,则利用参数校正方法对alpha稳定分布的特征参数进行优化,更新alpha
稳定分布,并重复步骤3);若拟合优度大于等于假设检验显著性水平ζ,则进入步骤4);
[0093]
利用假设检验方法对alpha稳定分布进行拟合优度检验的步骤包括:
[0094]
3.1)根据alpha稳定分布建立假设检验,即:
[0095][0096]
式中,为采集的振动数据x的概率分布函数;为对应的由特征参数估计得到的alpha稳定分布的概率分布函数;h0和h1分别代表零假设和备择假设。
[0097]
3.2)依据alpha稳定分布进行b次数据重采样,得到样本信号序列其中每个信号包含n个采样点;为第b次数据重采样得到的样本信号;
[0098]
3.3)建立检验统计量t(x),分别计算振动数据x与重采样信号x
*
的检验统计量数值,分别记为tr(x)和b为基于alpha稳定分布的数据重采样次数;
[0099]
3.4)计算alpha稳定分布的拟合优度即:
[0100][0101]
其中,激活函数κ(x)如下所示:
[0102][0103]
3.5)设置假设检验显著性水平ζ,判断拟合优度是否小于假设检验显著性水平ζ,若是,则利用参数校正方法对alpha稳定分布的特征参数进行优化,从而更新alpha稳定分布。依据alpha稳定分布得到的重采样信号的长度与振动数据x的长度保持一致。
[0104]
利用参数校正方法对alpha稳定分布的特征参数进行优化的步骤包括:
[0105]
3.5.1)降低参数搜索步长,并扩大参数搜索空间,从而优化回归算子y(t)=log[-log|φ(t)|2],进而对特征指数α和分散系数γ的估计值进行更新;
[0106]
3.5.2)采用与步骤1)相同的参数搜索步长和参数搜索空间优化回归算子z(ui)=g(ui)+πk(ui),进而对对称参数β和位置参数δ的估计值进行更新。
[0107]
4)设置冲击分量概率分布度量准则,将旋转机械当前时刻与初始时刻的alpha稳定分布进行对比,量化得到冲击分量概率分布的波动值;
[0108]
量化得到冲击分量概率分布的波动值的步骤包括:
[0109]
4.1)将当前时刻与初始时刻对应的alpha稳定分布通过平移变换对齐,即:
[0110]
δμ=μ
c-μ0ꢀꢀꢀ
(11)
[0111]
式中,μc和μ0分别代表当前时刻与初始时刻获得的alpha稳定分布的对称中心;δμ
为中心偏移量;
[0112]
4.2)设置冲击分量概率分布度量准则f(x,h),即:
[0113][0114]
式中,h为冲击分量度量幅值边界;pc和p0分别表示当前时刻与初始时刻的概率密度函数,ε为设定的极小值。
[0115]
4.3)计算得到冲击分量概率分布的波动值θ(x,h),即:
[0116]
θ(x,h)=fc(x,h)-f0(x,h)
ꢀꢀꢀ
(13)
[0117]
式中,fc(x,h)和f0(x,h)分别为当前时刻与初始时刻的冲击概率分布函数。
[0118]
5)对旋转机械设备不同运行时刻的冲击分量概率分布波动值进行分析,判断旋转机械设备的运行状态。
[0119]
所述旋转机械设备运行状态包括正常和异常;当冲击分量概率分布的波动值θ(x,h)小于等于预设波动阈值3σ时,旋转机械设备运行状态为正常,当冲击分量概率分布的波动值θ(x,h)大于预设波动阈值3σ时,旋转机械设备运行状态为异常。
[0120]
当旋转机械设备运行状态为异常时,采用平方包络谱分析方法对旋转机械设备振动数据进行分析,对旋转机械设备运行状态进行验证。
[0121]
采用平方包络谱分析方法对异常状态监测结果进行验证的方法包括:对异常状态振动数据进行平方包络谱分析,若旋转机械设备零部件的故障特征频率及其倍频成分出现在平方包络谱中,则相应零部件出现故障。
[0122]
实施例2:
[0123]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,包括以下步骤:
[0124]
1)利用传感器采集旋转机械运行过程的振动数据。
[0125]
2)利用回归分析方法对转机械运行过程的振动数据进行处理,得到用于刻画旋转机械振动数据冲击特性的alpha稳定分布的特征参数;
[0126]
3)利用假设检验方法对alpha稳定分布进行拟合优度检验,若拟合优度小于假设检验显著性水平ζ,则利用参数校正方法对alpha稳定分布的特征参数进行优化,更新alpha稳定分布,并重复步骤3);若拟合优度大于等于假设检验显著性水平ζ,则进入步骤4);
[0127]
4)设置冲击分量概率分布度量准则,将旋转机械当前时刻与初始时刻的alpha稳定分布进行对比,量化得到冲击分量概率分布的波动值;
[0128]
5)对旋转机械设备不同运行时刻的冲击分量概率分布波动值进行分析,判断旋转机械设备的运行状态。
[0129]
实施例3:
[0130]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,所述alpha稳定分布的特征参数包括特征指数α、分散系数γ、对称参数β和位置参数δ。
[0131]
实施例4:
[0132]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,
其中,得到用于刻画旋转机械振动数据冲击特性的alpha稳定分布的特征参数的步骤包括:
[0133]
1)建立alpha稳定分布特征函数:
[0134]
φ(t)=exp{jδt-γ|t|
α
·
[1+jβsgn(t)ω(t,α)]}
ꢀꢀꢀ
(1)
[0135]
式中,α为特征指数,且0<α≤2,用于表征信号冲击特性的显著程度;β为对称参数,且-1≤β≤1;δ为位置参数;γ为分散系数,且γ>0,用于表征alpha稳定分布围绕位置参数的分散程度;j为虚数单位;t为时间;
[0136]
其中,参数ω(t,α)和参数sgn(t)分别如下所示:
[0137][0138][0139]
2)将公式(1)转换为线性表达式,即:
[0140]
log(-log|φ(t)|2)=log(2γ)+αlog|t|
ꢀꢀꢀ
(4)
[0141]
3)对回归算子y(t)=log[-log|φ(t)|2]关于参数ψ(t)=log|t|进行如公式(5)所示的回归分析,从而得到特征指数α和分散系数γ的估计值;
[0142]
yk(t)=log(2γ)+αψk(t)+εkꢀꢀꢀ
(5)
[0143]
式中,εk为第k次迭代后的误差项;
[0144]
4)对回归算子z(ui)=g(ui)+πk(ui)关于实数ui和参数sgn(ui)|ui|
α
进行如公式(6)所示的回归分析,从而得到对称参数β和位置参数δ的估计值;
[0145][0146]
式中,ηi为第i次迭代后的误差项,ui为实数;
[0147]
其中,反正切函数g(ui)如下所示:
[0148]
g(ui)=arctan{im[φ(ui)]/re[φ(ui)]}
ꢀꢀꢀ
(7)
[0149]
式中,re[φ(ui)]和im[φ(ui)]分别为函数φ(ui)的实部和虚部。
[0150]
实施例5:
[0151]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,利用假设检验方法对alpha稳定分布进行拟合优度检验的步骤包括:
[0152]
1)根据alpha稳定分布建立假设检验,即:
[0153][0154]
式中,为采集的振动数据x的概率分布函数;为对应的由特征参数估计得到的alpha稳定分布的概率分布函数;h0和h1分别代表零假设和备择假设。
[0155]
2)依据alpha稳定分布进行b次数据重采样,得到样本信号序列
其中每个信号包含n个采样点;
[0156]
3)建立检验统计量t(x),分别计算振动数据x与重采样信号x
*
的检验统计量数值,分别记为tr(x)和b为基于alpha稳定分布的数据重采样次数;
[0157]
4)计算alpha稳定分布的拟合优度即:
[0158][0159]
其中,激活函数κ(x)如下所示:
[0160][0161]
5)设置假设检验显著性水平ζ,判断拟合优度是否小于假设检验显著性水平ζ,若是,则利用参数校正方法对alpha稳定分布的特征参数进行优化,从而更新alpha稳定分布。
[0162]
实施例6:
[0163]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,依据alpha稳定分布得到的重采样信号的长度与振动数据x的长度保持一致。
[0164]
实施例7:
[0165]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,利用参数校正方法对alpha稳定分布的特征参数进行优化的步骤包括:
[0166]
1)降低参数搜索步长,并扩大参数搜索空间,从而优化回归算子y(t)=log[-log|φ(t)|2],进而对特征指数α和分散系数γ的估计值进行更新;
[0167]
2)采用与步骤1)相同的参数搜索步长和参数搜索空间优化回归算子z(ui)=g(ui)+πk(ui),进而对对称参数β和位置参数δ的估计值进行更新。
[0168]
实施例8:
[0169]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,量化得到冲击分量概率分布的波动值的步骤包括:
[0170]
1)将当前时刻与初始时刻对应的alpha稳定分布通过平移变换对齐,即:
[0171]
δμ=μ
c-μ0ꢀꢀꢀ
(1)
[0172]
式中,μc和μ0分别代表当前时刻与初始时刻获得的alpha稳定分布的对称中心;
[0173]
2)设置冲击分量概率分布度量准则,即:
[0174][0175]
式中,h为冲击分量度量幅值边界;pc和p0分别表示当前时刻与初始时刻的概率密
度函数,ε为设定的极小值。
[0176]
3)计算得到冲击分量概率分布的波动值,即:
[0177]
θ(x,h)=fc(x,h)-f0(x,h)
ꢀꢀꢀ
(3)
[0178]
式中,fc(x,h)和f0(x,h)分别为当前时刻与初始时刻的冲击概率分布函数。
[0179]
实施例9:
[0180]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,所述旋转机械设备运行状态包括正常和异常;当冲击分量概率分布的波动值θ(x,h)小于等于预设波动阈值3σ时,旋转机械设备运行状态为正常,当冲击分量概率分布的波动值θ(x,h)大于预设波动阈值3σ时,旋转机械设备运行状态为异常。
[0181]
实施例10:
[0182]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,当旋转机械设备运行状态为异常时,采用平方包络谱分析方法对旋转机械设备振动数据进行分析,对旋转机械设备运行状态进行验证。
[0183]
实施例11:
[0184]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,主要步骤见实施例2,其中,采用平方包络谱分析方法对异常状态监测结果进行验证的方法包括:对异常状态振动数据进行平方包络谱分析,若旋转机械设备零部件的故障特征频率及其倍频成分出现在平方包络谱中,则相应零部件出现故障。
[0185]
实施例12:
[0186]
参见图1至图8,一种基于冲击分量概率分布度量的旋转机械状态监测方法,包括以下步骤:
[0187]
1)利用传感器采集所述旋转机械运行过程的振动数据。
[0188]
2)采用回归分析方法得到用于刻画所述旋转机械振动数据冲击特性的alpha稳定分布特征参数。
[0189]
采用回归分析方法获得alpha稳定分布特征参数的步骤包括:
[0190]
2.1)建立alpha稳定分布特征函数:
[0191]
φ(t)=exp{jδt-γ|t|
α
·
[1+jβsgn(t)ω(t,α)]}
ꢀꢀꢀ
(1)
[0192]
式中,α为特征指数,且0<α≤2,代表信号冲击特性的显著程度;β为对称参数,且-1≤β≤1;δ为位置参数;γ为分散系数,且γ>0,代表alpha稳定分布围绕位置参数的分散程度;j为虚数单位。此外,ω(t,α)和sgn(t)分别表示为:
[0193][0194][0195]
2.2)将公式(1)转换为线性表达式,即:
[0196]
log(-log|φ(t)|2)=log(2γ)+αlog|t|
ꢀꢀꢀ
(4)
[0197]
2.3)通过对y(t)=log[-log|φ(t)|2]关于ψ(t)=log|t|进行如下形式的回归分析,可以估计得到α和γ
[0198]
yk(t)=log(2γ)+αψk(t)+εkꢀꢀꢀ
(5)
[0199]
式中,εk为第k次迭代后的误差项。
[0200]
2.4)得到α和γ的估计值后,再对z(ui)=g(ui)+πk(ui)关于ui和sgn(ui)|ui|
α
进行如公式(6)所示的回归分析,可以估计得到β和δ
[0201][0202]
式中,ηi为第i次迭代后的误差项,ui为实数,g(ui)为反正切函数,表示为:
[0203]
g(ui)=arctan{im[φ(ui)]/re[φ(ui)]}
ꢀꢀꢀ
(7)
[0204]
式中,re[φ(ui)]和im[φ(ui)]分别为函数φ(ui)的实部和虚部。
[0205]
利用上述回归分析方法,即可估计得到alpha稳定分布的特征参数(α,β,γ,δ)。
[0206]
3)通过假设检验方法对所述alpha稳定分布进行拟合优度检验。
[0207]
通过假设检验方法对建立的alpha稳定分布进行拟合优度检验的步骤包括:
[0208]
3.1)根据由特征参数估计得到的alpha稳定分布建立假设检验:
[0209][0210]
式中,为采集的振动数据x的概率分布函数,为对应的由特征参数估计得到的alpha稳定分布的概率分布函数,h0和h1分别代表零假设和备择假设。
[0211]
3.2)依据上述alpha稳定分布进行b次数据重采样,得到样本信号序列其中每个信号包含n个采样点。
[0212]
3.3)建立检验统计量t(x),分别计算观测样本x与重采样信号x
*
的检验统计量数值,表示为tr(x)和
[0213]
3.4)利用上述检验统计量计算该假设检验条件下的p值,用于表征该alpha稳定分布的拟合优度:
[0214][0215]
式中,b为基于alpha稳定分布的数据重采样次数,k=1,2,
…
,b,激活函数κ(x)的表达式为:
[0216][0217]
3.5)设置假设检验的显著性水平ζ,若由公式(9)得到的p值大于ζ,则接受零假设h0,反之则拒绝h0。
[0218]
4)对于拟合优度低于设定阈值的alpha稳定分布,通过参数校正策略优化该alpha稳定分布的特征参数。
[0219]
通过参数校正策略对拟合优度低于设定阈值的alpha稳定分布的特征参数进行优化的步骤包括:
[0220]
4.1)通过降低参数搜索步长并同时扩大参数搜索空间来优化回归算子y(t)=log[-log|φ(t)|2],由此获得更为精确的特征参数α和γ。
[0221]
4.2)固定上述特征参数α和γ,采取相同的参数搜索步长和搜索空间优化策略,得到更为精确的特征参数β和δ。
[0222]
4.3)利用优化后的特征参数(α,β,γ,δ)更新原有的alpha稳定分布模型,再次进行拟合优度检验。
[0223]
4.4)若优化后的alpha稳定分布满足拟合优度检验阈值要求,则终止该参数校正优化过程,否则继续步骤4.1)至4.3)。
[0224]
5)设置冲击分量概率分布度量准则,将旋转机械当前时刻与初始时刻的alpha稳定分布进行对比,量化得到冲击分量概率分布的波动值。
[0225]
冲击分量概率分布波动值求解包括以下步骤:
[0226]
5.1)将当前时刻与初始时刻对应的alpha稳定分布通过平移变换对齐,即:
[0227]
δμ=μ
c-μ0ꢀꢀꢀ
(11)
[0228]
式中,μc和μ0分别代表当前时刻与初始时刻获得的alpha稳定分布的对称中心。δμ为中心偏移量;
[0229]
5.2)设置冲击分量概率分布度量准则:
[0230][0231]
式中,h为冲击分量度量幅值边界,pc和p0分别表示当前时刻与初始时刻的概率密度函数,ε为设定的极小值。
[0232]
5.3)依据上述冲击分量概率分布度量准则,可以得到冲击分量概率分布的波动值,即:
[0233]
θ(x,h)=fc(x,h)-f0(x,h)
ꢀꢀꢀ
(13)
[0234]
式中,fc(x,h)和f0(x,h)分别为当前时刻与初始时刻的累积冲击概率分布函数。
[0235]
6)通过对冲击分量概率分布波动值进行分析,判断旋转机械设备的运行状态。
[0236]
根据冲击分量概率分布波动值判断旋转机械设备运行状态的步骤包括:
[0237]
6.1)采集旋转机械设备初始平稳运行阶段的n个连续振动数据样本,依据公式(13)分别计算其冲击分量概率分布的波动值,并由此设置3σ阈值。
[0238]
6.2)采集当前时刻旋转机械设备的振动数据,计算其冲击分量概率分布波动值,若不超过设定的3σ阈值,则其运行状态为正常,否则为异常。
[0239]
对判定为异常状态的旋转机械设备振动数据进行分析,进而验证状态监测结果的准确性,方法包括:对异常状态振动数据进行平方包络谱分析,若旋转机械零部件的故障特征频率及其倍频成分出现在平方包络谱中,则确定该零部件出现故障。
[0240]
实施例13:
[0241]
一种基于冲击分量概率分布度量的旋转机械状态监测方法,具体步骤如下:
[0242]
步骤1:利用传感器采集旋转机械运行过程的振动数据;
[0243]
步骤2:对采集到的振动数据使用回归分析方法获取用于表征其冲击特性的alpha稳定分布特征参数;
[0244]
步骤3:采用假设检验方法对建立的alpha稳定分布的拟合优度进行验证;
[0245]
步骤4:对于拟合优度低于设定阈值的alpha稳定分布,通过参数校正策略优化该alpha稳定分布的特征参数;
[0246]
步骤5:设置冲击分量概率分布度量准则,将旋转机械当前时刻与初始时刻的alpha稳定分布进行对比,量化得到冲击分量概率分布的波动值;
[0247]
步骤6:通过对冲击分量概率分布波动值进行分析,判断旋转机械设备的运行状态。
[0248]
所述步骤2具体包括以下步骤:
[0249]
步骤201:建立alpha稳定分布特征函数:
[0250]
φ(t)=exp{jδt-γ|t|
α
·
[1+jβsgn(t)ω(t,α)]}
ꢀꢀꢀ
(1)
[0251]
式中,α为特征指数,且0<α≤2,代表信号冲击特性的显著程度;β为对称参数,且-1≤β≤1;δ为位置参数;γ为分散系数,且γ>0,代表alpha稳定分布围绕位置参数的分散程度;j为虚数单位。此外,ω(t,α)和sgn(t)分别表示为:
[0252][0253][0254]
步骤202:将公式(1)转换为线性表达式,即:
[0255]
log(-log|φ(t)|2)=log(2γ)+αlog|t|
ꢀꢀꢀ
(4)
[0256]
步骤203:通过对y(t)=log[-log|φ(t)|2]关于ψ(t)=log|t|进行如下形式的回归分析,可以估计得到α和γ
[0257]
yk(t)=log(2γ)+αψk(t)+εkꢀꢀꢀ
(5)
[0258]
式中,εk为第k次迭代后的误差项。
[0259]
步骤204:得到α和γ的估计值后,再对z(ui)=g(ui)+πk(ui)关于ui和sgn(ui)|ui|
α
进行如公式(6)所示的回归分析,可以估计得到β和δ
[0260][0261]
式中,ηi为第i次迭代后的误差项,ui为实数,g(ui)为反正切函数,表示为:
[0262]
g(ui)=arctan{im[φ(ui)]/re[φ(ui)]}
ꢀꢀꢀ
(7)
[0263]
式中,re[φ(ui)]和im[φ(ui)]分别为函数φ(ui)的实部和虚部。
[0264]
所述步骤3具体包括以下步骤:
[0265]
步骤301:根据由特征参数估计得到的alpha稳定分布建立假设检验:
[0266][0267]
式中,为采集的振动数据x的概率分布函数,为对应的由特征参数估计得到的alpha稳定分布的概率分布函数,h0和h1分别代表零假设和备择假设。
[0268]
步骤302:依据上述alpha稳定分布进行b次数据重采样,得到样本信号序列其中每个信号包含n个采样点。
[0269]
步骤303:建立检验统计量t(x),分别计算观测样本x与重采样信号x
*
的检验统计量数值,表示为tr(x)和
[0270]
步骤304:利用上述检验统计量计算该假设检验条件下的p值,用于表征该alpha稳定分布的拟合优度:
[0271][0272]
式中,b为基于alpha稳定分布的数据重采样次数,k=1,2,
…
,b,激活函数κ(x)的表达式为:
[0273][0274]
步骤305:设置假设检验的显著性水平ζ,若由公式(9)得到的p值大于ζ,则接受零假设h0,反之则拒绝h0。
[0275]
所述步骤4具体包括以下步骤:
[0276]
步骤401:通过降低参数搜索步长并同时扩大参数搜索空间来优化回归算子y(t)=log[-log|φ(t)|2],由此获得更为精确的特征参数α和γ。
[0277]
步骤402:固定上述特征参数α和γ,采取相同的参数搜索步长和搜索空间优化策略,得到更为精确的特征参数β和δ。
[0278]
步骤403:利用优化后的特征参数(α,β,γ,δ)更新原有的alpha稳定分布模型,再次进行拟合优度检验。
[0279]
步骤404:若优化后的alpha稳定分布满足拟合优度检验阈值要求,则终止该参数校正优化过程,否则继续步骤401至403。
[0280]
所述步骤5具体包括以下步骤:
[0281]
步骤501:将当前时刻与初始时刻对应的alpha稳定分布通过平移变换对齐,即:
[0282]
δμ=μ
c-μ0ꢀꢀꢀ
(11)
[0283]
式中,μc和μ0分别代表当前时刻与初始时刻获得的alpha稳定分布的对称中心。
[0284]
步骤502:设置冲击分量概率分布度量准则:
[0285][0286]
式中,h为冲击分量度量幅值边界,pc和p0分别表示当前时刻与初始时刻的概率密度函数,ε为设定的极小值。
[0287]
步骤503:依据上述冲击分量概率分布度量准则,可以得到冲击分量概率分布的波动值,即:
[0288]
θ(x,h)=fc(x,h)-f0(x,h)
ꢀꢀꢀ
(13)
[0289]
式中,fc(x,h)和f0(x,h)分别为当前时刻与初始时刻的累积冲击概率分布函数。
[0290]
所述步骤6具体包括以下步骤:
[0291]
步骤601:采集旋转机械设备初始平稳运行阶段的n个连续振动数据样本,依据公式(13)分别计算其冲击分量概率分布的波动值,并由此设置3σ阈值。
[0292]
步骤602:采集当前时刻旋转机械设备的振动数据,计算其冲击分量概率分布波动值,若不超过设定的3σ阈值,则其运行状态为正常,否则为异常。
[0293]
步骤603:对检测到的异常状态数据进行平方包络谱分析,进而对状态监测的准确性进行验证。
[0294]
实施例14:
[0295]
本实施例是基于美国辛辛那提大学智能运维系统中心公开提供的滚动轴承全生命周期数据集而开展的,以验证本发明所提供方法在滚动轴承状态监测中的有效性。
[0296]
步骤1:滚动轴承振动数据采集。
[0297]
滚动轴承全生命周期试验中数据采集试验台如图2所示,试验过程中主轴转速为2000转/分钟,设置采样频率为20khz,每个数据文件共包含20480个数据点,试验过程中每隔10分钟采集一次数据,最终共生成984个数据文件,其时域波形如图3所示。
[0298]
步骤2:针对采集到的每个振动数据样本,采用如前所述的回归分析方法计算并获取用于表征其冲击特性的alpha稳定分布的特征参数。
[0299]
步骤3:采用假设检验方法对建立的alpha稳定分布的拟合优度进行验证,具体过程为:建立如公式(8)所示的假设检验,其中h0为零假设,h1为备择假设;基于已建立的用于表征当前阶段滚动轴承冲击特性的alpha稳定分布进行200次数据重采样,每次重采样得到20480个数据点;建立检验统计量,分别计算当前采集的振动数据样本和重采样数据的检验统计量数值,并由此计算p值;设置假设检验的显著性水平为0.05,若p值大于该显著性水平阈值,则接受零假设h0,认为该拟合优度满足要求,否则拒绝h0。
[0300]
步骤4:对于拟合优度低于设定的显著性水平阈值的alpha稳定分布,通过参数校正策略优化该alpha稳定分布的特征参数,具体操作为:通过降低参数搜索步长并同时扩大参数搜索空间来优化回归算子,由此重新估计并更新特征参数。参数优化后的拟合优度检验结果如图4所示。
[0301]
步骤5:根据公式(12)设置冲击分量概率分布度量准则,将滚动轴承当前时刻与初始时刻的alpha稳定分布进行对比,量化得到冲击分量概率分布的波动值,并以此作为滚动轴承运行过程中的状态监测指标,结果如图5所示。
[0302]
步骤6:通过对冲击分量概率分布波动值进行分析,判断旋转机械设备的运行状态,具体步骤为:
[0303]
选取前200个冲击分量概率分布波动值作为滚动轴承正常状态下的监测结果,设置3σ阈值区间,结果如图5所示。依据3σ准则可知,在第533个数据采集时段滚动轴承的运行状态出现了异常波动,冲击分量增强,说明此时滚动轴承可能出现了早期故障。
[0304]
为了验证上述状态监测结果的准确性,采用平方包络谱分析方法对第533及其临近时段的滚动轴承振动数据样本进行分析,结果如图6所示。由图6(c)可知,从第533个数据采集时段开始,滚动轴承外圈故障特征频率fo及其二倍频成分开始出现在平方包络谱中,说明此时滚动轴承已经出现了早期局部故障,由此验证了本发明提供的基于冲击分量概率分布度量的旋转机械状态监测方法对早期故障具有较强的敏感性。
[0305]
为了验证本发明所提供方法的状态监测性能,将其与当前较为常用的峭度、均方根、hoyer指数、l2/l1范数、负熵、平滑指数以及基尼系数等状态监测指标进行对比。上述不同指标刻画的滚动轴承退化曲线如图7所示,可知当滚动轴承出现局部故障并逐渐加剧时,上述对比指标均出现了不同程度的剧烈波动,退化曲线呈现出先上升后下降的变化趋势,这对于后续可开展的基于状态指标的剩余使用寿命预测以及运维计划制定等较为不利。而本发明所提供方法得到的退化曲线具有明显的趋势性,能够为后续滚动轴承的失效预测提供有利条件。此外,为了验证上述不同指标对滚动轴承早期故障的敏感程度,分别采用前200个数据样本的指标计算结果设置3σ阈值区间,故障初始点检测结果如表1所示。本发明所提供方法的故障初始点检测结果与均方根相同,均优于其他对比指标的检测结果,验证了其在滚动轴承状态监测中的有效性。
[0306]
表1不同方法检测到的故障初始点
[0307][0308]
除了验证不同指标对滚动轴承早期故障的敏感性之外,对图7中由不同监测指标得到的滚动轴承退化曲线的趋势性进行量化分析,结果如图8所示。可知本发明提供的一种基于冲击分量概率分布度量的旋转机械状态监测方法所得到的滚动轴承状态监测结果具备优越的可预测趋势性,能够为后续开展的基于状态指标的滚动轴承剩余使用寿命预测以及运维计划制定等提供有利条件。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1