一种用于薄膜型人工肌肉偏转性能测试装置
1.本发明涉及凝胶电驱动器领域,具体为一种用于薄膜型人工肌肉偏转性能测试装置。
背景技术:
2.离子型电活性聚合物也被称作为人工肌肉,具有驱动电压低,质量轻,结构简单的特点,在仿生水下机器人、航天工程和医疗设备等领域有广阔的应用前景。通电后的变形量是评价人工肌肉性能的重要指标,但是目前缺乏专用的测量变形量设备。多数研究者仍使用自制的简易测试平台,这样无法完全保证实验条件的一致性,影响实验效果。
3.针对以上问题,本发明提供了一种用于薄膜型人工肌肉偏转性能测试装置,该机构可以通过贴敷电极的自动化夹具为被测人工肌肉供电,通电后由红外位移传感器(6)接收人工肌肉变形的数据,被测人工肌肉与红外位移传感器(6)的位置均可以根据实际情况进行调节。此外自动化夹具的夹紧力可控,可根据不同被测人工肌肉的机械性能进行微调。该装置可以实现薄膜型人工肌肉的自动通电装夹,测量并记录人工肌肉通电后的偏转数据,达到了测试人工肌肉变形性能的目的。该装置解决了简易测试平台实验一致性差的问题,具有可靠性高,精确度高的特点。
技术实现要素:
4.为解决上述问题,本发明的目的是提供一种自动化、可靠性高、精确度高的用于薄膜型人工肌肉偏转性能测试装置。
5.为实现上述目的,本发明采取的技术方案为:一种用于薄膜型人工肌肉偏转性能测试装置,其特征在于,包括有:位移传感器升降机构(1)、升降机构定位座(2)、测试平台(3)、人工肌肉供电装夹机构(4)、装夹机构滑台(5)、红外位移传感器(6)、滑台水平移动机构(7);位移传感器升降机构(1)通过升降机构定位座(2)安装在测试平台(3)上;红外位移传感器(6)安装在位移传感器升降机构(1)上;人工肌肉供电装夹机构(4)安装于装夹机构滑台(5)上;装夹机构滑台(5)通过滑块和导轨安装在测试平台(3)上;该装置可以实现薄膜型人工肌肉的自动通电装夹,并且测量并记录人工肌肉通电后的偏转数据。
6.所述的人工肌肉供电装夹机构(4)由铜电极(8)、夹具尼龙垫(9)、人工肌肉夹板(10)、夹具安装座(11)、人工肌肉活动夹板(12)、直线运动模块(13)、夹具支架(14)、传感器定位环(15)、夹板压力传感器(16)组成;夹具尼龙垫(9)上贴附铜电极(8);人工肌肉夹板(10)与人工肌肉活动夹板(12)上均贴敷夹具尼龙垫(9);人工肌肉夹板(10)通过销钉与夹具安装座(11)连接,并与夹板压力传感器(16)接触;夹板压力传感器(16)通过传感器定位环(15)安装于夹具安装座(11)上;夹具安装座(11)通过螺钉连接在夹具支架(14)上;该机构能够实现人工肌肉的自动装夹,而且可以反馈夹紧力并进行调节。
7.所述的滑台水平移动机构(7)由定位传感器(17)、同步带滑块(18)、条形安装槽(19)、同步带驱动机构(20)组成;定位传感器(17)使用螺钉固定在条形安装槽(19)上;条形
安装槽(19)固定于测试平台(3)底部;同步带驱动机构(20)上的同步带滑块(18)与装夹机构滑台(5)相连接;该机构可以实现装夹机构滑台(5)的横向移动,用于调节被测人工肌肉的与红外位移传感器(6)的距离。
8.本发明的有益效果:
9.人工肌肉供电装夹机构(4)可以供电并提供可控制的夹紧力。被测人工肌肉以及红外位移传感器(6)的位置都是可以根据实际情况调节的。该装置可以实现薄膜型人工肌肉的自动通电装夹,测量并记录人工肌肉通电后的偏转数据,达到了测试人工肌肉变形性能的目的。该装置解决了简易测试平台实验一致性差的问题,具有可靠性高,精确度高的特点。
附图说明
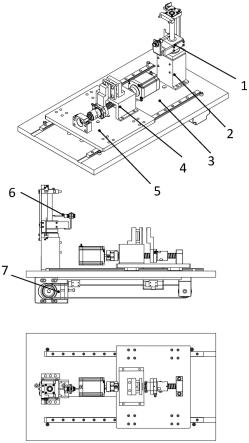
10.图1是本发明实施例的装配示意图;
11.图2是本发明实施例的人工肌肉供电装夹机构的装配示意图;
12.图3是本发明实施例的滑台水平移动机构的装配示意图;
13.其中1—位移传感器升降机构;2—升降机构定位座;3—测试平台;4—人工肌肉供电装夹机构;5—装夹机构滑台;6—红外位移传感器;7—滑台水平移动机构;8—铜电极;9—夹具尼龙垫;10—人工肌肉夹板;11—夹具安装座;12—人工肌肉活动夹板;13—直线运动模块;14—夹具支架;15—传感器定位环;16—夹板压力传感器;17—定位传感器;18—同步带滑块;19—条形安装槽;20—同步带驱动机构;
具体实施方式
14.下面结合附图对本发明进行详细的说明。然而应当理解,附图的提供仅为了本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。
15.请参阅图1至图3,为本发明的实施例,一种用于薄膜型人工肌肉偏转性能测试装置,其特征在于,包括有:位移传感器升降机构(1)、升降机构定位座(2)、测试平台(3)、人工肌肉供电装夹机构(4)、装夹机构滑台(5)、红外位移传感器(6)、滑台水平移动机构(7);位移传感器升降机构(1)通过升降机构定位座(2)安装在测试平台(3)上;红外位移传感器(6)安装在位移传感器升降机构(1)上;人工肌肉供电装夹机构(4)安装于装夹机构滑台(5)上;装夹机构滑台(5)通过滑块和导轨安装在测试平台(3)上;该装置可以实现薄膜型人工肌肉的自动通电装夹,并且测量并记录人工肌肉通电后的偏转数据。
16.所述的人工肌肉供电装夹机构(4)由铜电极(8)、夹具尼龙垫(9)、人工肌肉夹板(10)、夹具安装座(11)、人工肌肉活动夹板(12)、直线运动模块(13)、夹具支架(14)、传感器定位环(15)、夹板压力传感器(16)组成;夹具尼龙垫(9)上贴附铜电极(8);人工肌肉夹板(10)与人工肌肉活动夹板(12)上均贴敷夹具尼龙垫(9);人工肌肉夹板(10)通过销钉与夹具安装座(11)连接,并与夹板压力传感器(16)接触;夹板压力传感器(16)通过传感器定位环(15)安装于夹具安装座(11)上;夹具安装座(11)通过螺钉连接在夹具支架(14)上;该机构能够实现人工肌肉的自动装夹,而且可以反馈夹紧力并进行调节。
17.所述的滑台水平移动机构(7)由定位传感器(17)、同步带滑块(18)、条形安装槽(19)、同步带驱动机构(20)组成;定位传感器(17)使用螺钉固定在条形安装槽(19)上;条形
安装槽(19)固定于测试平台(3)底部;同步带驱动机构(20)上的同步带滑块(18)与装夹机构滑台(5)相连接;该机构可以实现装夹机构滑台(5)的横向移动,用于调节被测人工肌肉的与红外位移传感器(6)的距离。
18.测试人工肌肉的变形性能之前,可以根据被测样本材料的特点确定夹紧力,之后用人工肌肉供电装夹机构(4)进行装夹。被测人工肌肉与红外位移传感器(6)的距离可以根据传感器型号进行调节。人工肌肉供电装夹机构(4)通电后,红外位移传感器(6)将会记录被测样本的变形情况,数据可以连接到计算机进行读取。
19.以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1